Вам также может понравиться
- Composite Deck Technical Manual: 3WH-36 Hi FormДокумент33 страницыComposite Deck Technical Manual: 3WH-36 Hi FormVinod Kumar ReddyОценок пока нет
- Prokon - HPДокумент2 страницыProkon - HPkarfungОценок пока нет
- SA-1 - Hindi - Question Paper Star KidsДокумент3 страницыSA-1 - Hindi - Question Paper Star KidsmohanОценок пока нет
- Edge Embed PDFДокумент2 страницыEdge Embed PDFmohanОценок пока нет
- House in JubailДокумент17 страницHouse in JubailmohanОценок пока нет
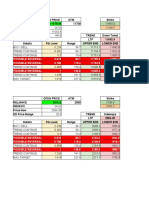
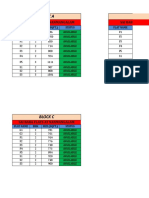
- Indiavix Vs Nifty - SD Calc With FibДокумент6 страницIndiavix Vs Nifty - SD Calc With FibmohanОценок пока нет
- Lesson 1 Egyptian CartoucheДокумент4 страницыLesson 1 Egyptian CartouchemohanОценок пока нет
- Welding at C1-1Документ1 страницаWelding at C1-1mohanОценок пока нет
- Welded Built-Up Columns, April 1966: Lehigh PreserveДокумент95 страницWelded Built-Up Columns, April 1966: Lehigh PreservemohanОценок пока нет
- Diagrid Structures Take Architecture to New HeightsДокумент13 страницDiagrid Structures Take Architecture to New HeightsmohanОценок пока нет
- En 10025Документ4 страницыEn 10025Jayesh83% (6)
- Engineering Example CalculationДокумент78 страницEngineering Example Calculationkae kaeОценок пока нет
- Asme Metric Material Secletion SheetДокумент2 страницыAsme Metric Material Secletion SheetmohanОценок пока нет
- 03 Eurocodes Steel Workshop KUHLMANNДокумент2 страницы03 Eurocodes Steel Workshop KUHLMANNmohanОценок пока нет
- KPI Process Guidance NoteДокумент14 страницKPI Process Guidance NoteHisham Abd El AleemОценок пока нет
- FEA Buckling AnalysisДокумент7 страницFEA Buckling AnalysisThuy Giang LeОценок пока нет
- 03 Eurocodes Steel Workshop KUHLMANNДокумент2 страницы03 Eurocodes Steel Workshop KUHLMANNmohanОценок пока нет
- EC - Design of Steel Buildings 8 - Worked Examples PDFДокумент26 страницEC - Design of Steel Buildings 8 - Worked Examples PDFAnonymous AV90SAXa5V100% (1)
- Design of Vierendeel TrussesДокумент52 страницыDesign of Vierendeel TrusseskyleОценок пока нет
- Engineering Example CalculationДокумент78 страницEngineering Example Calculationkae kaeОценок пока нет
- Sai Baba Flats at Nanmangalam property detailsДокумент2 страницыSai Baba Flats at Nanmangalam property detailsmohanОценок пока нет
- 442-Alma Boutique-Structural Calculation (UPDATE) PDFДокумент74 страницы442-Alma Boutique-Structural Calculation (UPDATE) PDFmohanОценок пока нет
- FCAW DocumentДокумент1 страницаFCAW DocumentmohanОценок пока нет
- Pay consumer debt and avoid disconnection of servicesДокумент1 страницаPay consumer debt and avoid disconnection of servicesmohanОценок пока нет
- Gas Shielded Flux Cored Arc Welding (FCAW) GuideДокумент19 страницGas Shielded Flux Cored Arc Welding (FCAW) GuideSanthosh Kumar100% (1)
- Rigging and Lifting Handbook SampleДокумент26 страницRigging and Lifting Handbook Samplemohan100% (1)
- EBrochure PDFДокумент15 страницEBrochure PDFmohanОценок пока нет
- Architects & Interior Designers in PondicherryДокумент3 страницыArchitects & Interior Designers in PondicherrymohanОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Polygraph 33333Документ49 страницPolygraph 33333Faith Angelie ArcillaОценок пока нет
- SetsДокумент16 страницSetsFaraz ZeyaОценок пока нет
- Records in Family Health Nursing PracticeДокумент6 страницRecords in Family Health Nursing PracticeA.j. Caraca88% (8)
- STAT 525 Diagnostics and Remedial Measures Chapter SummaryДокумент28 страницSTAT 525 Diagnostics and Remedial Measures Chapter SummaryDash CorderoОценок пока нет
- Research - Film Music PerceptionДокумент29 страницResearch - Film Music PerceptionMalak UsamaОценок пока нет
- Personality Traits of Narikuravar Students - An AnalysisДокумент6 страницPersonality Traits of Narikuravar Students - An AnalysisAnonymous CwJeBCAXpОценок пока нет
- PR1 Week 2 NoteДокумент2 страницыPR1 Week 2 NoteWendy CalmaОценок пока нет
- Volume 5 No.1 in Situ Concrete Compressive Strength AssessmentДокумент7 страницVolume 5 No.1 in Situ Concrete Compressive Strength Assessmentzacoeb_a1669Оценок пока нет
- Minerals: Design and Evaluation of An Expert System in A Crushing PlantДокумент15 страницMinerals: Design and Evaluation of An Expert System in A Crushing PlantLoven JannОценок пока нет
- CV of Asghar Laghari PDFДокумент4 страницыCV of Asghar Laghari PDFAsgharОценок пока нет
- English 104 MidtermДокумент6 страницEnglish 104 MidtermMaria Elizabeth Hinggoy LamamigoОценок пока нет
- Marketing Research Sampling ProcessДокумент11 страницMarketing Research Sampling ProcessAhel Patrick VitsuОценок пока нет
- Recruitmenr and Selection Process of Sonali Bank LTDДокумент15 страницRecruitmenr and Selection Process of Sonali Bank LTDMonjurul MohasinОценок пока нет
- Project (Time) Control For An EPC ProjectДокумент12 страницProject (Time) Control For An EPC ProjectcelalettinilhanОценок пока нет
- Collaborating With Local Practitioners To Lead A Capstone Civil Engineering Design CourseДокумент17 страницCollaborating With Local Practitioners To Lead A Capstone Civil Engineering Design CourseMervin BiloyОценок пока нет
- Kayendeke Cees MefmДокумент119 страницKayendeke Cees MefmEremu ThomasОценок пока нет
- CID-Duties & Responsibilities-EPS-PSDSДокумент4 страницыCID-Duties & Responsibilities-EPS-PSDSAshley Rañeses100% (1)
- Research)Документ48 страницResearch)Isaack MgeniОценок пока нет
- Statistical Undecidability is Statistically UndecidableДокумент4 страницыStatistical Undecidability is Statistically Undecidableadeka1Оценок пока нет
- T7 - Study Financial Distress Based On MDAДокумент12 страницT7 - Study Financial Distress Based On MDAFadil YmОценок пока нет
- Ia Marking CriteriaДокумент3 страницыIa Marking CriteriaCarolina BadiiОценок пока нет
- Describing Data Lecture with R Studio SoftwareДокумент67 страницDescribing Data Lecture with R Studio SoftwareHongjiang ZhangОценок пока нет
- Development and Pilot Testing of A Questionnaire To Assess Sensory Quality Control (SQC)Документ28 страницDevelopment and Pilot Testing of A Questionnaire To Assess Sensory Quality Control (SQC)Jose Manuel Quisquiche TorresОценок пока нет
- Descriptive Statistics: Definition 10.2.1Документ16 страницDescriptive Statistics: Definition 10.2.1anipa mwaleОценок пока нет
- Ch6 HW Kirkwood Solutions PDFДокумент20 страницCh6 HW Kirkwood Solutions PDFVivek SinghОценок пока нет
- SOEMM TAEASS504 Summative Assessment (2) - 1Документ13 страницSOEMM TAEASS504 Summative Assessment (2) - 1Maung Maung SoeОценок пока нет
- Continuing EducationДокумент24 страницыContinuing EducationVijith.V.kumar100% (6)
- SOLIDWORKS Simulation ProfessionalДокумент1 страницаSOLIDWORKS Simulation ProfessionalpinguituxОценок пока нет
- Performance VariabilityДокумент3 страницыPerformance VariabilityAGAОценок пока нет
- Business Always Starts and Closes With Customers and Hence The Customers Must Be Treated As The King of The MarketДокумент4 страницыBusiness Always Starts and Closes With Customers and Hence The Customers Must Be Treated As The King of The MarketSandeep ThotaОценок пока нет