Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Machine Vision Systems Tutorial: Image Processing & Morphological OperationsДокумент5 страницMachine Vision Systems Tutorial: Image Processing & Morphological OperationsShunKaiОценок пока нет
- 02 Robot Kinematics Part 3 Revised PDFДокумент16 страниц02 Robot Kinematics Part 3 Revised PDFShunKaiОценок пока нет
- Chapt04 LectureДокумент37 страницChapt04 LectureShunKaiОценок пока нет
- UumДокумент2 страницыUumShunKaiОценок пока нет
- IEEExplore Compatible TemplateДокумент2 страницыIEEExplore Compatible TemplateShunKaiОценок пока нет
- UNIMAPДокумент2 страницыUNIMAPShunKaiОценок пока нет
- Manual - Solutions-Electrical Machines, Drives and Power Systems 6th Ed. by WildiДокумент109 страницManual - Solutions-Electrical Machines, Drives and Power Systems 6th Ed. by WildiLeonardo Lira100% (3)
- UKMДокумент2 страницыUKMShunKaiОценок пока нет
- 20 Highest Paying Jobs in The World - Best, Most, Greatest of Everything Ranked User Contributed Rankings - ShareRanksДокумент26 страниц20 Highest Paying Jobs in The World - Best, Most, Greatest of Everything Ranked User Contributed Rankings - ShareRanksShunKaiОценок пока нет
- Top Universities in Malaysia - Top UniversitiesДокумент4 страницыTop Universities in Malaysia - Top UniversitiesShunKaiОценок пока нет
- 20 Highest Paying Jobs in The World - Best, Most, Greatest of Everything Ranked User Contributed Rankings - ShareRanksДокумент26 страниц20 Highest Paying Jobs in The World - Best, Most, Greatest of Everything Ranked User Contributed Rankings - ShareRanksShunKaiОценок пока нет
- UNIMASДокумент2 страницыUNIMASShunKaiОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- PeopleSoft Security TablesДокумент8 страницPeopleSoft Security TablesChhavibhasinОценок пока нет
- NABARD road inspection report formatДокумент24 страницыNABARD road inspection report formatSrinivas PОценок пока нет
- BenchmarkДокумент4 страницыBenchmarkKiran KumarОценок пока нет
- !!!Логос - конференц10.12.21 копіяДокумент141 страница!!!Логос - конференц10.12.21 копіяНаталія БондарОценок пока нет
- MQC Lab Manual 2021-2022-AutonomyДокумент39 страницMQC Lab Manual 2021-2022-AutonomyAniket YadavОценок пока нет
- Bula Defense M14 Operator's ManualДокумент32 страницыBula Defense M14 Operator's ManualmeОценок пока нет
- 202112fuji ViДокумент2 страницы202112fuji ViAnh CaoОценок пока нет
- Methods to estimate stakeholder views of sustainabilityДокумент7 страницMethods to estimate stakeholder views of sustainabilityAlireza FatemiОценок пока нет
- SDS OU1060 IPeptideДокумент6 страницSDS OU1060 IPeptideSaowalak PhonseeОценок пока нет
- Fast Aldol-Tishchenko ReactionДокумент5 страницFast Aldol-Tishchenko ReactionRSLОценок пока нет
- Combined Set12Документ159 страницCombined Set12Nguyễn Sơn LâmОценок пока нет
- Speed Reducer GearboxДокумент14 страницSpeed Reducer Gearboxعبد للهОценок пока нет
- PNBONE_mPassbook_134611_6-4-2024_13-4-2024_0053XXXXXXXX00 (1) (1)Документ3 страницыPNBONE_mPassbook_134611_6-4-2024_13-4-2024_0053XXXXXXXX00 (1) (1)imtiyaz726492Оценок пока нет
- Chapter 19 - 20 Continuous Change - Transorganizational ChangeДокумент12 страницChapter 19 - 20 Continuous Change - Transorganizational ChangeGreen AvatarОценок пока нет
- I Will Be Here TABSДокумент7 страницI Will Be Here TABSEric JaoОценок пока нет
- Pulse Width ModulationДокумент13 страницPulse Width Modulationhimanshu jainОценок пока нет
- UD150L-40E Ope M501-E053GДокумент164 страницыUD150L-40E Ope M501-E053GMahmoud Mady100% (3)
- Busbar sizing recommendations for Masterpact circuit breakersДокумент1 страницаBusbar sizing recommendations for Masterpact circuit breakersVikram SinghОценок пока нет
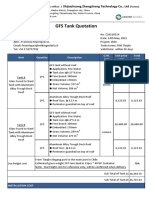
- GFS Tank Quotation C20210514Документ4 страницыGFS Tank Quotation C20210514Francisco ManriquezОценок пока нет
- Consensus Building e Progettazione Partecipata - Marianella SclaviДокумент7 страницConsensus Building e Progettazione Partecipata - Marianella SclaviWilma MassuccoОценок пока нет
- Evil Days of Luckless JohnДокумент5 страницEvil Days of Luckless JohnadikressОценок пока нет
- Kathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Документ236 страницKathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Csongor KicsiОценок пока нет
- U2 All That You Can't Leave BehindДокумент82 страницыU2 All That You Can't Leave BehindFranck UrsiniОценок пока нет
- Statistical Quality Control, 7th Edition by Douglas C. Montgomery. 1Документ76 страницStatistical Quality Control, 7th Edition by Douglas C. Montgomery. 1omerfaruk200141Оценок пока нет
- Hipotension 6Документ16 страницHipotension 6arturo castilloОценок пока нет
- Production of Sodium Chlorite PDFДокумент13 страницProduction of Sodium Chlorite PDFangelofgloryОценок пока нет
- Rapport DharaviДокумент23 страницыRapport DharaviUrbanistes du MondeОценок пока нет
- Cell Organelles ColoringДокумент2 страницыCell Organelles ColoringThomas Neace-FranklinОценок пока нет
- Mutual Fund PDFДокумент22 страницыMutual Fund PDFRajОценок пока нет
- Maxx 1657181198Документ4 страницыMaxx 1657181198Super UserОценок пока нет