Вам также может понравиться
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Narrowband and Wideband FMДокумент18 страницNarrowband and Wideband FMIslam CandleОценок пока нет
- Lecture 18 Static Error Constants and System TypeДокумент21 страницаLecture 18 Static Error Constants and System TypeHamza KhanОценок пока нет
- Economic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleДокумент26 страницEconomic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleAdisuОценок пока нет
- Plotting of Bode Plots, Root Locus and Nyquist PlotsДокумент6 страницPlotting of Bode Plots, Root Locus and Nyquist PlotsPuduru BharathiОценок пока нет
- Pam, PPM, PWMДокумент9 страницPam, PPM, PWMShathis Kumar100% (2)
- Chapter 5 PCM ModДокумент12 страницChapter 5 PCM Modarvinabdillah100% (1)
- EE 370 Electronic Instrument Assignment 3Документ1 страницаEE 370 Electronic Instrument Assignment 3vineet mishraОценок пока нет
- Lab Manual - TheoryДокумент49 страницLab Manual - TheoryLovely VinayОценок пока нет
- Electrical Properties of Mos DeviceДокумент28 страницElectrical Properties of Mos Devicemayamohan7250% (1)
- Mitigation of Interhormonics in PV Systems With Maximum Power Point Tracking ModificationДокумент15 страницMitigation of Interhormonics in PV Systems With Maximum Power Point Tracking ModificationSAIPRAKASH BONALA100% (1)
- All Classroom Class ExamplesДокумент51 страницаAll Classroom Class ExamplesAhmed Sabri0% (1)
- Practical ExamДокумент2 страницыPractical ExamIrfan AliОценок пока нет
- Important Questions Transmission Lines and WaveguidesДокумент1 страницаImportant Questions Transmission Lines and WaveguideskskumargieОценок пока нет
- Figure 2.71: First Order Low-Pass Butterworth FilterДокумент18 страницFigure 2.71: First Order Low-Pass Butterworth Filternavkar_nisitОценок пока нет
- Exp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerДокумент7 страницExp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerSumit KatreОценок пока нет
- Experiment 3 Economic Load DispatchДокумент12 страницExperiment 3 Economic Load DispatchMahesh KambleОценок пока нет
- Waveform Coding QuestionsДокумент12 страницWaveform Coding QuestionspadОценок пока нет
- Embedded SystemДокумент28 страницEmbedded SystemDevon Buckley86% (7)
- Asynchronous Operationand ResynchronizationДокумент15 страницAsynchronous Operationand Resynchronizationquangspkt0% (1)
- Triangular Wave Generator Using Op Amp - EEEGUIDE PDFДокумент6 страницTriangular Wave Generator Using Op Amp - EEEGUIDE PDFDeepanshi RuhelaОценок пока нет
- Control Systems IMP QUESTIONSДокумент8 страницControl Systems IMP QUESTIONSHarika HarikaОценок пока нет
- Experiment no. 2 Aim: - Theory: c1 (t) = √2/Tb cos 2πƒ1tДокумент6 страницExperiment no. 2 Aim: - Theory: c1 (t) = √2/Tb cos 2πƒ1tMudit GoelОценок пока нет
- Chapter One: Review of Digital Communication SystemsДокумент26 страницChapter One: Review of Digital Communication SystemsYes Mu So ManОценок пока нет
- Emf Equation of AlternatorДокумент2 страницыEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreОценок пока нет
- Polar & Nyquist Plots: Multiple Choice Questions For Online ExamДокумент18 страницPolar & Nyquist Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtОценок пока нет
- Root Locus ExperimentДокумент2 страницыRoot Locus Experimentnishantkothari77Оценок пока нет
- Introduction To Power Systems (Eceg-3176) : Addis Ababa University Addis Ababa Institute of Technology (Aait)Документ38 страницIntroduction To Power Systems (Eceg-3176) : Addis Ababa University Addis Ababa Institute of Technology (Aait)DANIEL ABERAОценок пока нет
- Nand 2 Nor 2Документ19 страницNand 2 Nor 2Nagendra BoyellaОценок пока нет
- Group5 Lab 09Документ6 страницGroup5 Lab 09FALSERОценок пока нет
- AC Drives Tutorial - 1, 2, 3, 4-1Документ8 страницAC Drives Tutorial - 1, 2, 3, 4-1PrakashОценок пока нет
- AE08 SolДокумент175 страницAE08 SolDilpalОценок пока нет
- 2015 Distance Relay ExampleДокумент2 страницы2015 Distance Relay ExampleAmanОценок пока нет
- M.tech ThesisДокумент59 страницM.tech ThesisRama Krishna100% (1)
- Network Theory Question Bank PDFДокумент14 страницNetwork Theory Question Bank PDFmohammadmohisin134Оценок пока нет
- Questions & Answers On S-Domain AnalysisДокумент33 страницыQuestions & Answers On S-Domain Analysiskibrom atsbhaОценок пока нет
- Dijkstra AlgorithmДокумент2 страницыDijkstra AlgorithmMegan VegaОценок пока нет
- Importance of Active Filters For Improvement of Power QualityДокумент8 страницImportance of Active Filters For Improvement of Power QualityseventhsensegroupОценок пока нет
- EEE3001 Software ManualДокумент34 страницыEEE3001 Software ManualManuDubeyОценок пока нет
- Measurement of VelocityДокумент59 страницMeasurement of VelocityYogeshBhatt100% (1)
- Control QuestionsДокумент6 страницControl Questionshksaifee0% (1)
- TEE3211 DrivesДокумент126 страницTEE3211 DrivesWebster Fungirai100% (1)
- NWS 124 Tutorial Sheet 2 (Solutions)Документ6 страницNWS 124 Tutorial Sheet 2 (Solutions)AnnОценок пока нет
- Two Marks - UNIT IV - 28.10.2022Документ13 страницTwo Marks - UNIT IV - 28.10.2022G.L. Jai Purushotham RajОценок пока нет
- Angle Modulation NOTESДокумент2 страницыAngle Modulation NOTESJay Amiel Ajoc50% (2)
- Triangular Wave Generator Using Op Amp - WaveformsДокумент6 страницTriangular Wave Generator Using Op Amp - WaveformsNagendrababu VasaОценок пока нет
- Bode PlotДокумент7 страницBode Plotnabilo20Оценок пока нет
- AC-DC Converter - DДокумент39 страницAC-DC Converter - DBishnu100% (1)
- Introduction To Electrical Machines Teaching MaterialДокумент286 страницIntroduction To Electrical Machines Teaching Materialtesfayregs gebretsadik100% (1)
- Full State Feedback ControlДокумент8 страницFull State Feedback ControlGabriel RodriguesОценок пока нет
- Digital Filters (IIR)Документ28 страницDigital Filters (IIR)Sujatanu0% (1)
- Capacitive TransducerДокумент21 страницаCapacitive Transducersourabhyadav14Оценок пока нет
- Design Via Root Locus and Frequency ResponseДокумент15 страницDesign Via Root Locus and Frequency ResponseBran WzОценок пока нет
- Numerical Sheet Control SystemsДокумент20 страницNumerical Sheet Control SystemsKAMARAJU SAI VAMSHIОценок пока нет
- CAED Question BankДокумент21 страницаCAED Question BankAnonymous yCJo9PcDОценок пока нет
- Speed Control of DC Motor Using MicrocontrollerДокумент5 страницSpeed Control of DC Motor Using MicrocontrollerVenkatesan SwamyОценок пока нет
- 8051 Microcontroller Module 5 NotesДокумент27 страниц8051 Microcontroller Module 5 Notesrakesh rakiОценок пока нет
- Compensator Design Using Bode PlotДокумент18 страницCompensator Design Using Bode PlotHBОценок пока нет
- Want To Learn Faster? : ONAN Cooling of TransformerДокумент4 страницыWant To Learn Faster? : ONAN Cooling of TransformerShah JayОценок пока нет
- Earthing in Electrical Network - Purpose, Methods and MeasurementДокумент12 страницEarthing in Electrical Network - Purpose, Methods and MeasurementShah JayОценок пока нет
- Autotransformer StarterДокумент1 страницаAutotransformer StarterShah JayОценок пока нет
- Measurement of Earth Resistance (Three Point Method)Документ5 страницMeasurement of Earth Resistance (Three Point Method)Shah JayОценок пока нет
- Hazardous Areas: Gases and VapoursДокумент10 страницHazardous Areas: Gases and VapoursShah JayОценок пока нет
- Ingress Protection IP Ratings - What Do They Mean?Документ1 страницаIngress Protection IP Ratings - What Do They Mean?Shah JayОценок пока нет
- Power Flow Diagram of Induction Motor - 5Документ1 страницаPower Flow Diagram of Induction Motor - 5Shah JayОценок пока нет
- Lag, Lead, Lead-Lag - Compensation in Control SystemДокумент11 страницLag, Lead, Lead-Lag - Compensation in Control SystemShah Jay100% (1)
- Transformer ProblemsДокумент4 страницыTransformer ProblemsShah JayОценок пока нет
- Iec CodeДокумент14 страницIec CodeShah JayОценок пока нет
- Programmable Logic ControllerДокумент5 страницProgrammable Logic ControllerShah JayОценок пока нет
- Why LT Motors Are Delta Connected and HT Motors Are Star Connected - 4Документ2 страницыWhy LT Motors Are Delta Connected and HT Motors Are Star Connected - 4Shah JayОценок пока нет
- Practical Transformer 2Документ4 страницыPractical Transformer 2Shah JayОценок пока нет
- Buchholz RelayДокумент2 страницыBuchholz RelayShah JayОценок пока нет
- Trip Circuit (Relay)Документ2 страницыTrip Circuit (Relay)Shah JayОценок пока нет
- Rocket BatteryДокумент7 страницRocket BatteryShah JayОценок пока нет
- Checklist Forbuilding Wire and Cable InsallationДокумент4 страницыChecklist Forbuilding Wire and Cable InsallationJobish PKОценок пока нет
- GyrotronsДокумент233 страницыGyrotronsPablo BenalcazarОценок пока нет
- Topics For Thesis in Electronics and CommunicationДокумент8 страницTopics For Thesis in Electronics and Communicationfjbnd9fq100% (2)
- ST - Joseph College of Engineering: SriperumbudurДокумент45 страницST - Joseph College of Engineering: SriperumbudurSuryaОценок пока нет
- Error Display Dorma-ES-200Документ7 страницError Display Dorma-ES-200MichaelОценок пока нет
- cc1352p PDFДокумент87 страницcc1352p PDFguru87.joshi3473Оценок пока нет
- Exemplar For Internal Assessment Resource Chemistry For Achievement Standard 91393Документ2 страницыExemplar For Internal Assessment Resource Chemistry For Achievement Standard 91393Ellymar DuqueОценок пока нет
- 100% Electric Pick & Carry Crane: Made in HollandДокумент8 страниц100% Electric Pick & Carry Crane: Made in HollandLuffy11Оценок пока нет
- End Stop - Limit Switch Problems - 3 Steps - InstructablesДокумент1 страницаEnd Stop - Limit Switch Problems - 3 Steps - InstructablesMarcel PiersonОценок пока нет
- Ec 2007Документ11 страницEc 2007mallanna4blogsОценок пока нет
- Service Manual: Multi Channel Av ReceiverДокумент106 страницService Manual: Multi Channel Av ReceiverSas Pro EletronicaОценок пока нет
- CX 320DLED (32Z1) CHOT CV320H1-F01 V01 (200nit 2X6) 2019.01.28Документ35 страницCX 320DLED (32Z1) CHOT CV320H1-F01 V01 (200nit 2X6) 2019.01.28Birciu Vali67% (3)
- 132 KV Surge Arrester - Technical SpecificationДокумент11 страниц132 KV Surge Arrester - Technical SpecificationvikasmikkuОценок пока нет
- PVREA Transformer Impedance Data - 2023 PDFДокумент1 страницаPVREA Transformer Impedance Data - 2023 PDFhaiqal ghaniОценок пока нет
- QuestionBank Power QualityДокумент7 страницQuestionBank Power QualityramОценок пока нет
- 6-DZF-23 JДокумент1 страница6-DZF-23 JJanuar Adi NugrohoОценок пока нет
- Eaton Fire Addressable Mimic PCB zpcb2252 Datasheet 1217Документ1 страницаEaton Fire Addressable Mimic PCB zpcb2252 Datasheet 1217Shahbaz AlamОценок пока нет
- Experiment 7: Bipolar Junction Transistor: Operation and Its Characteristic CurveДокумент4 страницыExperiment 7: Bipolar Junction Transistor: Operation and Its Characteristic CurveDan Joshua EspinaОценок пока нет
- Circuit Name: Incoming Call Detector: Ece-2002 Analog Electronic Circuits Digital AssignmentДокумент4 страницыCircuit Name: Incoming Call Detector: Ece-2002 Analog Electronic Circuits Digital AssignmentKarthik ReddyОценок пока нет
- TEKO DAS Part C-Safety - Warnings - 91 080 0783-03Документ20 страницTEKO DAS Part C-Safety - Warnings - 91 080 0783-03test321yОценок пока нет
- Static Watt Hour Meter: Single Phase Multifunction Energy MeterДокумент2 страницыStatic Watt Hour Meter: Single Phase Multifunction Energy MeterilaaОценок пока нет
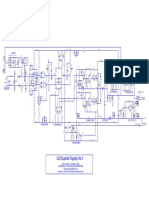
- UcD-Superlite v.3 FlagshipДокумент1 страницаUcD-Superlite v.3 FlagshipDidik PrasetyoОценок пока нет
- Speed Controllers - REE: 2 WireДокумент1 страницаSpeed Controllers - REE: 2 WireManunoghiОценок пока нет
- Easy Harmony GXU - HMIGXU5512Документ6 страницEasy Harmony GXU - HMIGXU5512Adrion MontelliОценок пока нет
- 03 CMP Troubleshooting E11-15, 51Документ13 страниц03 CMP Troubleshooting E11-15, 51Tomas RojasОценок пока нет
- Digital System Design I DACДокумент9 страницDigital System Design I DACعبد الحكم زهيرОценок пока нет
- Experiment 3a Colpitt Oscillator: Aim: Components RequiredДокумент9 страницExperiment 3a Colpitt Oscillator: Aim: Components RequiredAlfred D'SouzaОценок пока нет
- UT8Q6zYXdpcXXc PVBXFДокумент5 страницUT8Q6zYXdpcXXc PVBXFOsama YaseenОценок пока нет
- BTRES19G Series (Metal Housing)Документ2 страницыBTRES19G Series (Metal Housing)111Оценок пока нет
- Automatic Water Level Controller For Overhead and Underground Water TankДокумент5 страницAutomatic Water Level Controller For Overhead and Underground Water TankPoonam KilaniyaОценок пока нет