Вам также может понравиться
- Connect Group Leaders Manual SpanishДокумент20 страницConnect Group Leaders Manual Spanishwitness esОценок пока нет
- Mapa Conceptual NeurocienciaДокумент4 страницыMapa Conceptual NeurocienciaCapuñay Diaz Christian80% (5)
- Mapa Conceptual NeurocienciaДокумент4 страницыMapa Conceptual NeurocienciaCapuñay Diaz Christian80% (5)
- Algebra de BooleДокумент12 страницAlgebra de BooleCapuñay Diaz Christian100% (6)
- Negociacion Caso STEVE JOBSДокумент14 страницNegociacion Caso STEVE JOBSTeresa Obregon0% (3)
- Remedios para El Desamor PDFДокумент2 страницыRemedios para El Desamor PDFSoledad Rodriguez67% (6)
- Álgebra Vectorial FundamentosДокумент50 страницÁlgebra Vectorial Fundamentosapolo456100% (9)
- Atencion A IfaДокумент6 страницAtencion A IfaGuillermo L Alvarado100% (1)
- Mapa Funcional PPT OkДокумент20 страницMapa Funcional PPT OkEsteban Huamani RojasОценок пока нет
- Practica de Orientacion Grupo #2Документ4 страницыPractica de Orientacion Grupo #2Rikudou SamaОценок пока нет
- Declaracion TestimonialДокумент205 страницDeclaracion TestimonialSintia Liz Rojas SuarezОценок пока нет
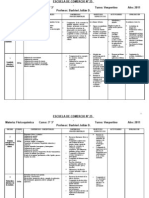
- Planificacion Fisico Quimica 3 AñoДокумент3 страницыPlanificacion Fisico Quimica 3 AñoMarcela LAura Olivera88% (8)
- Vectores Rectas y PlanosДокумент23 страницыVectores Rectas y PlanosKevin CajachuanОценок пока нет
- Pendiente de Una RectaДокумент33 страницыPendiente de Una RectaAlexzythoTorresGamarra100% (1)
- Vector UnitarioДокумент22 страницыVector UnitarioJavier Suarez100% (1)
- Arbitrage y Mediación en Las AméricasДокумент468 страницArbitrage y Mediación en Las AméricasIvana Lima Regis100% (2)
- Pajon, Javier y Davila, Juan Antonio (1999) - Algebra Vectorial FundamentosДокумент51 страницаPajon, Javier y Davila, Juan Antonio (1999) - Algebra Vectorial FundamentosCristhian RodriguezОценок пока нет
- Apuntes Tema 8-Geometria Afin PDFДокумент10 страницApuntes Tema 8-Geometria Afin PDFleoncio54Оценок пока нет
- Definición de VectoresДокумент13 страницDefinición de VectoresDavid LuisОценок пока нет
- Apunte Curso A Distancia - Calculo Vectorial - Agosto - 2020Документ14 страницApunte Curso A Distancia - Calculo Vectorial - Agosto - 2020Ismael SEОценок пока нет
- Definición de VectoresДокумент23 страницыDefinición de VectoresCarlos Ariel Veizaga VallejosОценок пока нет
- Ecuaciones de RectaДокумент2 страницыEcuaciones de RectaREYES MONTES YANERY MONTSERRATHОценок пока нет
- Ecuaciones y Sistemas de InecuacionesДокумент13 страницEcuaciones y Sistemas de InecuacionesfabnavОценок пока нет
- Trabajo de Investigación MatemáticaДокумент15 страницTrabajo de Investigación MatemáticaKarla MonseОценок пока нет
- Diferentes Formas de Expresión de La RectaДокумент10 страницDiferentes Formas de Expresión de La Rectajoancrxd00100% (1)
- Producto Escalar y VectorialДокумент18 страницProducto Escalar y VectorialClaudia MartinezОценок пока нет
- Algebra 1Документ7 страницAlgebra 1DAVID TOLA BALBOAОценок пока нет
- Ecuaciones de La RectaДокумент9 страницEcuaciones de La RectaReynaldo MartinezОценок пока нет
- Matematicas Resueltos (Soluciones) La Recta en El Plano Nivel I 1º BachilleratoДокумент36 страницMatematicas Resueltos (Soluciones) La Recta en El Plano Nivel I 1º Bachilleratomanuel_valle_4100% (1)
- Unidad10 Geometria Afin EspacioДокумент20 страницUnidad10 Geometria Afin Espaciotxitxo123Оценок пока нет
- Algebra VectorialДокумент16 страницAlgebra VectorialDeisy BaezОценок пока нет
- VECTORES EN R2 y R3Документ23 страницыVECTORES EN R2 y R3lorenita272829100% (1)
- Ecuación de La RectaДокумент14 страницEcuación de La RectaSarah CastroОценок пока нет
- Recta Que Pasa Por Dos PuntosДокумент32 страницыRecta Que Pasa Por Dos PuntosORLIANNYSОценок пока нет
- Recurso para Tarea 1-2Документ6 страницRecurso para Tarea 1-2sujeiry mateoОценок пока нет
- Unidad 1 CalculoДокумент9 страницUnidad 1 CalculoIsrael XoloОценок пока нет
- DasdДокумент6 страницDasdGerardo LuceroОценок пока нет
- Definición de Un Vector, y SubtemasДокумент7 страницDefinición de Un Vector, y SubtemasTano ReyesОценок пока нет
- 1.4 Ecuaciòn de La RectaДокумент6 страниц1.4 Ecuaciòn de La RectaJonathan NolascoОценок пока нет
- Ecuacion Vectorial 01Документ19 страницEcuacion Vectorial 01Gonzalo Rafael Bolados UbedaОценок пока нет
- Cordenadas en El PlanoДокумент20 страницCordenadas en El PlanoAMYNNXXXXОценок пока нет
- Ecuacion de La RectaДокумент19 страницEcuacion de La RectaPaco Ramos50% (6)
- Ecuación de La RectaДокумент3 страницыEcuación de La RectakarinavillarragaОценок пока нет
- VECTORESДокумент46 страницVECTORESHillary Milagros Vasquez FernandezОценок пока нет
- Calculo Vectorial 1.6 y 1.7Документ11 страницCalculo Vectorial 1.6 y 1.7Hoshigaki Angel100% (1)
- Geometría Analítica 4ESOДокумент7 страницGeometría Analítica 4ESOChristian TorresОценок пока нет
- MATEMATICAДокумент16 страницMATEMATICAyajaira ruizОценок пока нет
- Forma Simplificada de La Ecuación de La RectaДокумент8 страницForma Simplificada de La Ecuación de La RectaAngel NarobОценок пока нет
- Investigacion de La Unidad 1Документ11 страницInvestigacion de La Unidad 1lorenzogordillo4Оценок пока нет
- Guía Práctica N 1 (1) MAEMATICASДокумент25 страницGuía Práctica N 1 (1) MAEMATICASyenny vivasОценок пока нет
- Capitulo 3 Geometria AnaliticaДокумент21 страницаCapitulo 3 Geometria Analiticahumbertokomes5Оценок пока нет
- Investigacion R3Документ20 страницInvestigacion R3LukeОценок пока нет
- Líneas RectasДокумент12 страницLíneas RectasVictor Jassiel Guifarro EscobarОценок пока нет
- Tarea 1 de Calculo IДокумент9 страницTarea 1 de Calculo ILeonarda YaporОценок пока нет
- Inv. Unidad 3Документ11 страницInv. Unidad 3vladimir KuОценок пока нет
- Ecuación de La RectaДокумент19 страницEcuación de La RectaNovoa Photoshop TutorialОценок пока нет
- Espacio VectorialДокумент15 страницEspacio VectorialAlberto Perez RodriguezОценок пока нет
- Unidad # 1 Cálculo VectorialДокумент16 страницUnidad # 1 Cálculo VectorialMarlenMesaОценок пока нет
- Definición de Vectores 2021Документ20 страницDefinición de Vectores 2021Elzer Elera LopezОценок пока нет
- Ecuacion de La RectaДокумент20 страницEcuacion de La Rectapesito_100Оценок пока нет
- Apunte Rectas en R2Документ7 страницApunte Rectas en R2Alex TevezОценок пока нет
- 7.-Ecuacion de La RectaДокумент9 страниц7.-Ecuacion de La RectaWendy EsmeraldaОценок пока нет
- Ecuaciones de La RectaДокумент3 страницыEcuaciones de La RectaPedro SebastianОценок пока нет
- Actividad 10Документ14 страницActividad 10dianaОценок пока нет
- Ecuación de La RectaДокумент6 страницEcuación de La RectabarreiroesquivelОценок пока нет
- Calculo FinalДокумент70 страницCalculo FinalisraelОценок пока нет
- Junior Integrales TriplesДокумент10 страницJunior Integrales TriplesJoohan ViieraОценок пока нет
- VectoresДокумент30 страницVectoresLeandro Esteban GarciaОценок пока нет
- Ecuacion de La RectaДокумент11 страницEcuacion de La Rectarenata morenoОценок пока нет
- 05 VectoresДокумент6 страниц05 VectoreszzAndreszzОценок пока нет
- Comparación de NúmerosДокумент2 страницыComparación de NúmerosCapuñay Diaz ChristianОценок пока нет
- ComplejoДокумент91 страницаComplejoCapuñay Diaz ChristianОценок пока нет
- Mapa Conceptual Origenes de La NeuropsicologíaДокумент1 страницаMapa Conceptual Origenes de La NeuropsicologíaCapuñay Diaz ChristianОценок пока нет
- CodigoДокумент3 страницыCodigoCapuñay Diaz ChristianОценок пока нет
- SEP Voltaje-Ciencias OK PDFДокумент192 страницыSEP Voltaje-Ciencias OK PDFisc.alejandrocondeОценок пока нет
- NeurologíaДокумент6 страницNeurologíaCapuñay Diaz ChristianОценок пока нет
- 1 FilosofíaДокумент9 страниц1 FilosofíaCapuñay Diaz ChristianОценок пока нет
- PhytonДокумент9 страницPhytonCapuñay Diaz ChristianОценок пока нет
- Clase 01Документ13 страницClase 01Capuñay Diaz ChristianОценок пока нет
- Horario 2019-2Документ10 страницHorario 2019-2Capuñay Diaz ChristianОценок пока нет
- El HadaДокумент1 страницаEl HadaCapuñay Diaz ChristianОценок пока нет
- Instrucciones e InformaciónДокумент1 страницаInstrucciones e InformaciónWilson Walas LlanqmОценок пока нет
- Luces IntermitentesДокумент14 страницLuces IntermitentesCapuñay Diaz ChristianОценок пока нет
- Repaso TrigoДокумент4 страницыRepaso TrigoCapuñay Diaz ChristianОценок пока нет
- DISCURSOGRAMAДокумент6 страницDISCURSOGRAMACapuñay Diaz ChristianОценок пока нет
- Horario 2019-2Документ10 страницHorario 2019-2Capuñay Diaz ChristianОценок пока нет
- Teoria Delaconduccion MetalicaДокумент12 страницTeoria Delaconduccion MetalicaCapuñay Diaz ChristianОценок пока нет
- C 1 SolucionesДокумент11 страницC 1 SolucionesDiana VergaraОценок пока нет
- Area Entre Las Curvas, Aplicaciones A La Economia, Area Entre Las Curvas.Документ1 страницаArea Entre Las Curvas, Aplicaciones A La Economia, Area Entre Las Curvas.Capuñay Diaz ChristianОценок пока нет
- Terminos Canonicos y Mapa de KarnaughДокумент5 страницTerminos Canonicos y Mapa de KarnaughCapuñay Diaz ChristianОценок пока нет
- Anexo 2 Relación de Documentos T-2018Документ2 страницыAnexo 2 Relación de Documentos T-2018Capuñay Diaz ChristianОценок пока нет
- Aplicaciones de Ecuaciones DiferencialesДокумент32 страницыAplicaciones de Ecuaciones DiferencialesAntonio VillasmilОценок пока нет
- ExamenДокумент1 страницаExamenCapuñay Diaz ChristianОценок пока нет
- Ley de Enfriamiento de NewtonДокумент33 страницыLey de Enfriamiento de NewtonalvarohostОценок пока нет
- ExcelДокумент19 страницExcelCapuñay Diaz ChristianОценок пока нет
- Aplicaciones de Ecuaciones DiferencialesДокумент32 страницыAplicaciones de Ecuaciones DiferencialesAntonio VillasmilОценок пока нет
- Program A PostДокумент2 страницыProgram A PostCapuñay Diaz ChristianОценок пока нет
- 4.PDF. Apuntes Taro y - Viaje-HeroeДокумент5 страниц4.PDF. Apuntes Taro y - Viaje-HeroeClaudia GabrielaОценок пока нет
- Área FamiliarДокумент8 страницÁrea FamiliarADRIANA MARIA GONZALEZ CALDERONОценок пока нет
- Vázquez 1996Документ26 страницVázquez 1996Camilo GallardoОценок пока нет
- George BerkeleyДокумент2 страницыGeorge BerkeleyKarla De la hozОценок пока нет
- Baby Human PensarДокумент3 страницыBaby Human PensarMel Alisson Flores Conde100% (5)
- Silabo Analisis Estructural I LMVGДокумент4 страницыSilabo Analisis Estructural I LMVGyomacuОценок пока нет
- 2.-La Patria y El NiñoДокумент4 страницы2.-La Patria y El NiñoCarla Carranza loayzaОценок пока нет
- 12 Sermones Mayordomia 2016Документ54 страницы12 Sermones Mayordomia 2016Samuel David Roncal VargasОценок пока нет
- 1 PB PDFДокумент19 страниц1 PB PDFPeter Rob ParkerОценок пока нет
- Proyecto UnoДокумент2 страницыProyecto UnoKaren GomezОценок пока нет
- Resiliencia TextoДокумент8 страницResiliencia TextoCesar LilloОценок пока нет
- FC Tarea2Документ2 страницыFC Tarea2Scott WaltonОценок пока нет
- Fase 4 Lectura Critica Sobre La EmpatiaДокумент7 страницFase 4 Lectura Critica Sobre La EmpatiaLuzmila Ramos33% (3)
- CapitalДокумент20 страницCapitalLuis VasquezОценок пока нет
- La Salud Integral en El Colegio LacordaireДокумент2 страницыLa Salud Integral en El Colegio LacordaireBlanca Nelly PatiñoОценок пока нет
- Presentacion Psicologia Del ConsumidorДокумент11 страницPresentacion Psicologia Del ConsumidorJhonny Walfred Escobar RodriguezОценок пока нет
- Anam Cara - El Libro de La Sabiduria Celta (Odonohue J)Документ147 страницAnam Cara - El Libro de La Sabiduria Celta (Odonohue J)Joaquin GonzalezОценок пока нет
- Voces PDFДокумент139 страницVoces PDFJorge CastellanosОценок пока нет
- Solucion Guia EticaДокумент22 страницыSolucion Guia EticaYuliana GomezОценок пока нет
- CRONOGRAMA GENERAL SEGUNDO SEMESTRE LENGUAJE - 2º BàsicoДокумент5 страницCRONOGRAMA GENERAL SEGUNDO SEMESTRE LENGUAJE - 2º BàsicoJimena JorqueraОценок пока нет
- Los GoyosДокумент88 страницLos GoyosLeon JesusОценок пока нет