Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Hfe Sony Cdp-Xa20es ServiceДокумент43 страницыHfe Sony Cdp-Xa20es ServiceMokaОценок пока нет
- 1994 Ranger Fuse BoxДокумент2 страницы1994 Ranger Fuse Boxcarlos100% (1)
- NIH Public Access: Author ManuscriptДокумент20 страницNIH Public Access: Author ManuscriptWan TingОценок пока нет
- IIR FilterДокумент50 страницIIR FilterWan Ting100% (1)
- Chapter 3 - NoiseДокумент21 страницаChapter 3 - NoiseWan TingОценок пока нет
- FIR FilterДокумент32 страницыFIR FilterWan TingОценок пока нет
- Transfer Functions, Block Diagram and Signal Flow Graph (Week 2 & 3)Документ17 страницTransfer Functions, Block Diagram and Signal Flow Graph (Week 2 & 3)Wan TingОценок пока нет
- Nursing Homes: Care of Residents Nursing Activities of Daily Living Elderly Disabilities Legal RightsДокумент9 страницNursing Homes: Care of Residents Nursing Activities of Daily Living Elderly Disabilities Legal RightsWan TingОценок пока нет
- Chapter 5 - AM ReceptionДокумент44 страницыChapter 5 - AM ReceptionJ A P SОценок пока нет
- DGS 8800e Operators ManualДокумент40 страницDGS 8800e Operators ManualNevzat Alkaç100% (5)
- The RF Line NPN Silicon Power Transistor 100W, 30-200Mhz, 28VДокумент6 страницThe RF Line NPN Silicon Power Transistor 100W, 30-200Mhz, 28VSalam MohammedОценок пока нет
- MAKE A Mind Control Hypnosis Dream Machine CheapДокумент12 страницMAKE A Mind Control Hypnosis Dream Machine CheapjohnrighОценок пока нет
- Sailor. For Global Communication: Sailor Transmitter T2131 and T2135 Error 83Документ5 страницSailor. For Global Communication: Sailor Transmitter T2131 and T2135 Error 83Camila SuarezОценок пока нет
- Class D Amplifiers - Interactive SimulationsДокумент5 страницClass D Amplifiers - Interactive SimulationsCristi BondОценок пока нет
- DsPIC SW Receiver Rev1.1Документ7 страницDsPIC SW Receiver Rev1.1ngt881Оценок пока нет
- Battery Sample TenderДокумент21 страницаBattery Sample TenderBharat SharmaОценок пока нет
- Features: Engine Gages &controllersДокумент5 страницFeatures: Engine Gages &controllersВасиль ЛопушанськийОценок пока нет
- Vectorstar Pulse Modulator Test Set: Installation GuideДокумент22 страницыVectorstar Pulse Modulator Test Set: Installation GuideOmer NaserОценок пока нет
- Centrix Cable Test Van System in 1 and 3 Phased Version DatasheetДокумент4 страницыCentrix Cable Test Van System in 1 and 3 Phased Version DatasheetTri Ari WibowoОценок пока нет
- 19 670864alemitecls1000Документ28 страниц19 670864alemitecls1000papagoman100% (1)
- Applicatins of DemuxДокумент2 страницыApplicatins of Demuxy.harsha vardhan reddyОценок пока нет
- Topten Mantul DP II Teknika 8mbДокумент867 страницTopten Mantul DP II Teknika 8mbPersada tugboatОценок пока нет
- EST - Refresher Bring HomeДокумент4 страницыEST - Refresher Bring HomeHary Kriz100% (1)
- 5952-8255 Keysight Noise MeasurementsДокумент34 страницы5952-8255 Keysight Noise MeasurementsKåre AgardhОценок пока нет
- Dual Cal DC-5Документ23 страницыDual Cal DC-5TechtureGОценок пока нет
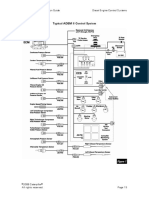
- Typical ADEM II Control System: Application and Installation Guide Diesel Engine Control SystemsДокумент10 страницTypical ADEM II Control System: Application and Installation Guide Diesel Engine Control SystemsPaulo MandingaОценок пока нет
- Features General Description: PWM/PFM Dual-Mode Step-Down Switching RegulatorДокумент7 страницFeatures General Description: PWM/PFM Dual-Mode Step-Down Switching RegulatorMohit KaundalОценок пока нет
- 2 Marks PDFДокумент5 страниц2 Marks PDFBala913Оценок пока нет
- EC8353 Iq 2 MarkДокумент9 страницEC8353 Iq 2 MarkK.Swetha PriyadharshiniОценок пока нет
- Course Objective: To Design Microwave AmplifierДокумент3 страницыCourse Objective: To Design Microwave AmplifierAshwini KothavaleОценок пока нет
- Electronics Circuits Lab ManualДокумент109 страницElectronics Circuits Lab ManualIndische Mädchen100% (2)
- Ee230 - ProjectДокумент4 страницыEe230 - Projectapi-532427666Оценок пока нет
- Catalog - 2015 - Data Sheets PDFДокумент346 страницCatalog - 2015 - Data Sheets PDFNoe Santiago100% (1)
- Non-Synchronous PWM Boost Controller: General DescriptionДокумент10 страницNon-Synchronous PWM Boost Controller: General DescriptionMuller tubeОценок пока нет
- JVC Gr-dvm5 Technical GuideДокумент77 страницJVC Gr-dvm5 Technical GuideavrelecОценок пока нет
- BuccaneerДокумент7 страницBuccaneerAlessandro GonzálezОценок пока нет