Вам также может понравиться
- Yong ShimДокумент10 страницYong Shimklomps_jrОценок пока нет
- WinklerДокумент17 страницWinklerklomps_jrОценок пока нет
- WierszyckiДокумент6 страницWierszyckiklomps_jrОценок пока нет
- Wilhelmy 1Документ15 страницWilhelmy 1klomps_jrОценок пока нет
- Wind Loading of A Paraboloidal Antenna Dish Supported On A Telescopic Extendable Mast byДокумент7 страницWind Loading of A Paraboloidal Antenna Dish Supported On A Telescopic Extendable Mast byklomps_jrОценок пока нет
- Wilhelmy 2Документ15 страницWilhelmy 2klomps_jrОценок пока нет
- Predicting Buckling For Medical Device-Catheter Interaction During ImplantДокумент3 страницыPredicting Buckling For Medical Device-Catheter Interaction During Implantklomps_jrОценок пока нет
- WuДокумент13 страницWuklomps_jrОценок пока нет
- YangДокумент12 страницYangklomps_jrОценок пока нет
- WilkensonДокумент11 страницWilkensonklomps_jrОценок пока нет
- WoyakДокумент15 страницWoyakklomps_jrОценок пока нет
- Winkler Auc2008Документ15 страницWinkler Auc2008klomps_jrОценок пока нет
- YangДокумент12 страницYangklomps_jrОценок пока нет
- Zama RippaДокумент8 страницZama Rippaklomps_jrОценок пока нет
- Optimization Module For Abaqus/CAE Based On Genetic AlgorithmДокумент18 страницOptimization Module For Abaqus/CAE Based On Genetic Algorithmklomps_jrОценок пока нет
- Shoji AUC2008Документ14 страницShoji AUC2008klomps_jrОценок пока нет
- Ucak Auc2008Документ13 страницUcak Auc2008klomps_jrОценок пока нет
- Montgomery Auc2008Документ20 страницMontgomery Auc2008klomps_jrОценок пока нет
- Creep Modelling of Polyolefins Using Artificial Neural NetworksДокумент15 страницCreep Modelling of Polyolefins Using Artificial Neural Networksklomps_jrОценок пока нет
- Ramesh Auc2008Документ17 страницRamesh Auc2008klomps_jrОценок пока нет
- On Nonlinear Buckling and Collapse Analysis Using Riks MethodДокумент9 страницOn Nonlinear Buckling and Collapse Analysis Using Riks Methodklomps_jrОценок пока нет
- Xie Auc2008Документ13 страницXie Auc2008klomps_jrОценок пока нет
- Wocke Auc2008Документ16 страницWocke Auc2008klomps_jrОценок пока нет
- X-FEM For Abaqus (XFA) Toolkit For Automated Crack Onset and Growth SimulationsДокумент15 страницX-FEM For Abaqus (XFA) Toolkit For Automated Crack Onset and Growth Simulationsklomps_jrОценок пока нет
- Zhong AUC2008Документ15 страницZhong AUC2008klomps_jrОценок пока нет
- Wentzel Auc2008Документ7 страницWentzel Auc2008klomps_jrОценок пока нет
- Wilmer AUC2008Документ14 страницWilmer AUC2008klomps_jrОценок пока нет
- Song Auc2008Документ15 страницSong Auc2008klomps_jrОценок пока нет
- Thiruppukuzhi AUC2008Документ16 страницThiruppukuzhi AUC2008klomps_jrОценок пока нет
- Taggart AUC2008Документ15 страницTaggart AUC2008klomps_jrОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- О-Acetylation of 4-Hydroxybenzoic Acid with Acetic AnhydrideДокумент6 страницО-Acetylation of 4-Hydroxybenzoic Acid with Acetic AnhydrideRichaОценок пока нет
- Components of Coal AshДокумент4 страницыComponents of Coal AshDulguun BayОценок пока нет
- Introduction To Drilling FluidsДокумент23 страницыIntroduction To Drilling FluidszeidisuckОценок пока нет
- Preparation of Toilet SoapДокумент24 страницыPreparation of Toilet SoapIshaan Sharma92% (12)
- Bisulfite Liquor Production: Daradal Edorot Pajela CadalsoДокумент8 страницBisulfite Liquor Production: Daradal Edorot Pajela CadalsoJudy Marl Bingcolado ElarmoОценок пока нет
- Usp Description and SolubilityДокумент1 страницаUsp Description and SolubilityvafaashkОценок пока нет
- Baroid Basic Mud Engineering CourseДокумент96 страницBaroid Basic Mud Engineering Courseabdo kasebОценок пока нет
- Hey 4-N/i'ethylenedio Yphenyl Sopropyl E.: 4-MethylenedioxyphenylisopropylamineДокумент2 страницыHey 4-N/i'ethylenedio Yphenyl Sopropyl E.: 4-MethylenedioxyphenylisopropylamineAnonymous FigYuONxuuОценок пока нет
- Ionic Equilibria in Aqueous SystemsДокумент86 страницIonic Equilibria in Aqueous SystemsDagnu DejeneОценок пока нет
- Alcohols: - Structure and BondingДокумент49 страницAlcohols: - Structure and BondingJackson UdumaОценок пока нет
- 2017 PosterДокумент1 страница2017 PostertilamisuОценок пока нет
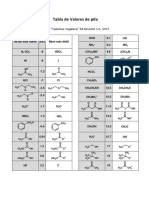
- Tabla de Valores de Pka: S. Ege "Química Orgánica" Ed Reverté S.A. 1997Документ7 страницTabla de Valores de Pka: S. Ege "Química Orgánica" Ed Reverté S.A. 1997loaca95Оценок пока нет
- Precipitation Presentation FinalДокумент44 страницыPrecipitation Presentation FinalJunior J DliwayoОценок пока нет
- Homework ProblemsДокумент96 страницHomework ProblemsGautamist's Gautamism50% (2)
- Caracterizacao PluronicДокумент15 страницCaracterizacao PluronicThiago Nunes VianaОценок пока нет
- Recycling of Spent Lithium-Ion Batteries in View of Lithium Recovery RewievДокумент13 страницRecycling of Spent Lithium-Ion Batteries in View of Lithium Recovery RewievEnzo Bellini100% (1)
- An Analytical Experiment For General Chemistry: Ascorbic Acid As A Standard For Iodometric TitrationsДокумент7 страницAn Analytical Experiment For General Chemistry: Ascorbic Acid As A Standard For Iodometric TitrationsniltonОценок пока нет
- Biokimia: Arif Rahman, ST MTДокумент55 страницBiokimia: Arif Rahman, ST MTYudha Adi KusumaОценок пока нет
- Stones: DefinitionsДокумент4 страницыStones: DefinitionsAr Mohd NadeemОценок пока нет
- Chemical Analysis of Graphite: Standard Test Methods ForДокумент8 страницChemical Analysis of Graphite: Standard Test Methods For916bushraОценок пока нет
- 1093 MB File 7beb6Документ3 страницы1093 MB File 7beb6Socorro EsparzaОценок пока нет
- Unit 4-Gravimetric MethodДокумент29 страницUnit 4-Gravimetric MethodKhánh Vy NguyênОценок пока нет
- 370 HW 1 SДокумент9 страниц370 HW 1 SNikka LopezОценок пока нет
- 05 Petrucci10e CSMДокумент45 страниц05 Petrucci10e CSMAlexОценок пока нет
- Planar 555Документ6 страницPlanar 555apaponthОценок пока нет
- MEB33 Cell and Molecular Biology Lec 1st Sem 2021-2022 Enabling Assessment On Modules 3-4aДокумент4 страницыMEB33 Cell and Molecular Biology Lec 1st Sem 2021-2022 Enabling Assessment On Modules 3-4aAko Si Vern ÖОценок пока нет
- ReductionДокумент50 страницReductionElvis NgandweОценок пока нет
- Microbiology With Diseases by Taxonomy 4th Edition Bauman Test Bank 1Документ538 страницMicrobiology With Diseases by Taxonomy 4th Edition Bauman Test Bank 1ricardo100% (46)
- Porous MaterialsДокумент34 страницыPorous MaterialsartsonmОценок пока нет
- P-Block Elements (Halogens and Noble Gases) : ChemistryДокумент23 страницыP-Block Elements (Halogens and Noble Gases) : ChemistrythinkiitОценок пока нет