Вам также может понравиться
- Applsci 10 02263 v2Документ19 страницApplsci 10 02263 v2Vlatko TrifunovicОценок пока нет
- Hadziefendic 2018Документ9 страницHadziefendic 2018Vlatko TrifunovicОценок пока нет
- Tomographic Site Characterization Using CPT, Ert, & GPRДокумент114 страницTomographic Site Characterization Using CPT, Ert, & GPRVlatko TrifunovicОценок пока нет
- Flir Thermal Camera Guide For Research Professionals PDFДокумент32 страницыFlir Thermal Camera Guide For Research Professionals PDFJaime Adolfo Mejia LeónОценок пока нет
- Influence of Process Parameters in Pulse Plasma Nitriding of Plain Carbon SteelДокумент6 страницInfluence of Process Parameters in Pulse Plasma Nitriding of Plain Carbon SteelVlatko TrifunovicОценок пока нет
- Solis Brochure EUR V13 2021 05 220920 205148Документ77 страницSolis Brochure EUR V13 2021 05 220920 205148Vlatko TrifunovicОценок пока нет
- Energies 15 04607Документ10 страницEnergies 15 04607Vlatko TrifunovicОценок пока нет
- Estimation of Electricity Losses in Distributed ElДокумент6 страницEstimation of Electricity Losses in Distributed ElVlatko TrifunovicОценок пока нет
- 12 01832 Bpast - No.692 26.04.21 K1 G OK1Документ9 страниц12 01832 Bpast - No.692 26.04.21 K1 G OK1Vlatko TrifunovicОценок пока нет
- The Algorithm For Determination of Necessary Characteristics of Backfill Materials Used For Grounding Resistances of Grounding Loops ReductionДокумент7 страницThe Algorithm For Determination of Necessary Characteristics of Backfill Materials Used For Grounding Resistances of Grounding Loops ReductionVlatko TrifunovicОценок пока нет
- Hadziefendic 2019Документ9 страницHadziefendic 2019Vlatko TrifunovicОценок пока нет
- 3647744Документ14 страниц3647744Vlatko TrifunovicОценок пока нет
- 10.1007 - s00202 013 0291 9Документ13 страниц10.1007 - s00202 013 0291 9Vlatko TrifunovicОценок пока нет
- 10.1007 - s00202 013 0291 9Документ13 страниц10.1007 - s00202 013 0291 9Vlatko TrifunovicОценок пока нет
- Detection of Series Arcing in Low-Voltage Electrical InstallationsДокумент10 страницDetection of Series Arcing in Low-Voltage Electrical InstallationsVlatko TrifunovicОценок пока нет
- Electrical Discharges in Air Yield More Energy Than InputДокумент3 страницыElectrical Discharges in Air Yield More Energy Than InputVlatko TrifunovicОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Apr 88372Документ2 страницыApr 88372N1234mОценок пока нет
- Capacitor Bank PDFДокумент2 страницыCapacitor Bank PDFsapnaadiyodiОценок пока нет
- Constructing a 12V DC Power SupplyДокумент7 страницConstructing a 12V DC Power SupplyOgunyemi VictorОценок пока нет
- Heat and TemperatureДокумент50 страницHeat and TemperaturealienlightningОценок пока нет
- CL-NG-6460-002-018 Checklist For Oil-Immersed Transformer Rev02Документ8 страницCL-NG-6460-002-018 Checklist For Oil-Immersed Transformer Rev02WajahatОценок пока нет
- Solution of Momentum Transport Problems Using Navier Stokes EquationДокумент21 страницаSolution of Momentum Transport Problems Using Navier Stokes EquationAndres OrtegaОценок пока нет
- Kompresibilitas OkДокумент9 страницKompresibilitas OkFeby RochmaniahОценок пока нет
- Swaraj India Public School: Class: 8 Subject: Maths TOPIC: Mensuration EXERCISE: 18.3 Solution of Classwork SumsДокумент5 страницSwaraj India Public School: Class: 8 Subject: Maths TOPIC: Mensuration EXERCISE: 18.3 Solution of Classwork SumsANUSHKA SINGHОценок пока нет
- Module 5 Print 2Документ16 страницModule 5 Print 2Merrie Anne Pascual BagsicОценок пока нет
- Curbe KSBДокумент112 страницCurbe KSBBogdan Mihai BarzoiОценок пока нет
- Derivation of Formula For Calculation of Turns Per Volts of Transformer DesignДокумент15 страницDerivation of Formula For Calculation of Turns Per Volts of Transformer DesignJemal Musa100% (1)
- Helukabel Power CablesДокумент17 страницHelukabel Power CablesperijoyОценок пока нет
- MEC102 Engineering Mechanics Course OverviewДокумент1 страницаMEC102 Engineering Mechanics Course OverviewVkrthirumalai RamanathanОценок пока нет
- Verifying Kirchhoff's Laws in DC CircuitsДокумент3 страницыVerifying Kirchhoff's Laws in DC CircuitsJaber Al Nahian70% (23)
- Motor and Generator Narrative Report - Group4 PDFДокумент18 страницMotor and Generator Narrative Report - Group4 PDFJohn Lloyd ComiaОценок пока нет
- Accu-Touch Forehead Thermometer: User GuideДокумент26 страницAccu-Touch Forehead Thermometer: User GuideGUstavo RUizОценок пока нет
- BOIL OFF GAS ANALYSISДокумент8 страницBOIL OFF GAS ANALYSISJetul PatelОценок пока нет
- Motors PDFДокумент6 страницMotors PDFMark Anthony Sabio LuceroОценок пока нет
- Ebook Chemistry 11Th Edition Chang Solutions Manual Full Chapter PDFДокумент30 страницEbook Chemistry 11Th Edition Chang Solutions Manual Full Chapter PDFJaniceMarqueznxed100% (13)
- Fundamentals of Thermodynamics Solutions ch05Документ190 страницFundamentals of Thermodynamics Solutions ch05Cierré No'Middlename Jones100% (10)
- Units and Dimensions: Introduction To Chemical Engineering CalculationsДокумент24 страницыUnits and Dimensions: Introduction To Chemical Engineering Calculationsrazanmk961214Оценок пока нет
- Machine Component and Connector LocationsДокумент2 страницыMachine Component and Connector LocationsTjaart van der WaltОценок пока нет
- Must Read ONGC Fluid Mechanics Questions With AnswersДокумент5 страницMust Read ONGC Fluid Mechanics Questions With AnswersIgbereyivwe TejiriОценок пока нет
- EE 740 Professor Ali Keyhani Lecture #6: Load-Tap-Change Transformer (LTC)Документ11 страницEE 740 Professor Ali Keyhani Lecture #6: Load-Tap-Change Transformer (LTC)Mohamed A. HusseinОценок пока нет
- 1 s2.0 S0378779622008513 MainДокумент8 страниц1 s2.0 S0378779622008513 MainMansoor AsifОценок пока нет
- Induction Motors Part AДокумент88 страницInduction Motors Part ASushmitha BadukondaОценок пока нет
- Solar Project For 3bedroomДокумент3 страницыSolar Project For 3bedroomokpo attahОценок пока нет
- Ryan Lasek - HSC Mathematics 2U - AssessmentДокумент10 страницRyan Lasek - HSC Mathematics 2U - AssessmentRyan LasekОценок пока нет
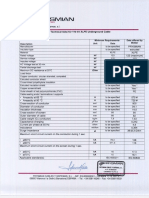
- 110kv Ehv Cable - GtpsДокумент2 страницы110kv Ehv Cable - GtpsBijaya Kumar MohantyОценок пока нет
- Hydrophore Sequencing Relay HSR2: 2 Outputs HSR3: 3 OutputsДокумент1 страницаHydrophore Sequencing Relay HSR2: 2 Outputs HSR3: 3 Outputsmezo catОценок пока нет