Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Promotion-Mix (: Tools For IMC)Документ11 страницPromotion-Mix (: Tools For IMC)Mehul RasadiyaОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Determination Rules SAP SDДокумент2 страницыDetermination Rules SAP SDkssumanthОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 22 Khan S.Документ7 страниц22 Khan S.scholarlyreseachjОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
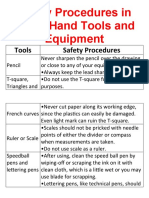
- Safety Procedures in Using Hand Tools and EquipmentДокумент12 страницSafety Procedures in Using Hand Tools and EquipmentJan IcejimenezОценок пока нет
- JIS G 3141: Cold-Reduced Carbon Steel Sheet and StripДокумент6 страницJIS G 3141: Cold-Reduced Carbon Steel Sheet and StripHari0% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Jackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairДокумент65 страницJackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairTeamMichael100% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Iguana Joe's Lawsuit - September 11, 2014Документ14 страницIguana Joe's Lawsuit - September 11, 2014cindy_georgeОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- How He Loves PDFДокумент2 страницыHow He Loves PDFJacob BullockОценок пока нет
- Chhay Chihour - SS402 Mid-Term 2020 - E4.2Документ8 страницChhay Chihour - SS402 Mid-Term 2020 - E4.2Chi Hour100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- SweetenersДокумент23 страницыSweetenersNur AfifahОценок пока нет
- Aleutia Solar Container ClassroomДокумент67 страницAleutia Solar Container ClassroomaleutiaОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Cambridge IGCSE™: Information and Communication Technology 0417/13 May/June 2022Документ15 страницCambridge IGCSE™: Information and Communication Technology 0417/13 May/June 2022ilovefettuccineОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Chapter 13 (Automatic Transmission)Документ26 страницChapter 13 (Automatic Transmission)ZIBA KHADIBIОценок пока нет
- Interlocking Block TechnologyДокумент15 страницInterlocking Block TechnologyChaula Trivedi100% (5)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Antena TelnetДокумент4 страницыAntena TelnetMarco PiambaОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- ISO 27001 Introduction Course (05 IT01)Документ56 страницISO 27001 Introduction Course (05 IT01)Sheik MohaideenОценок пока нет
- Global Divides: The North and The South: National University Sports AcademyДокумент32 страницыGlobal Divides: The North and The South: National University Sports AcademyYassi CurtisОценок пока нет
- Cisco UCS Adapter TroubleshootingДокумент90 страницCisco UCS Adapter TroubleshootingShahulОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Synthesis, Analysis and Simulation of A Four-Bar Mechanism Using Matlab ProgrammingДокумент12 страницSynthesis, Analysis and Simulation of A Four-Bar Mechanism Using Matlab ProgrammingPedroAugustoОценок пока нет
- Umwd 06516 XD PDFДокумент3 страницыUmwd 06516 XD PDFceca89Оценок пока нет
- 2011-2012 - Medical - DirectoryДокумент112 страниц2011-2012 - Medical - DirectoryЈелена КошевићОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Rom 2 - 0-11 (En)Документ132 страницыRom 2 - 0-11 (En)Mara HerreraОценок пока нет
- Advanced Chemical Engineering Thermodynamics (Cheg6121) : Review of Basic ThermodynamicsДокумент74 страницыAdvanced Chemical Engineering Thermodynamics (Cheg6121) : Review of Basic ThermodynamicsetayhailuОценок пока нет
- Design of Penstock: Reference Code:IS 11639 (Part 2)Документ4 страницыDesign of Penstock: Reference Code:IS 11639 (Part 2)sunchitk100% (3)
- Subject Manual Tle 7-8Документ11 страницSubject Manual Tle 7-8Rhayan Dela Cruz DaquizОценок пока нет
- Obligatoire: Connectez-Vous Pour ContinuerДокумент2 страницыObligatoire: Connectez-Vous Pour ContinuerRaja Shekhar ChinnaОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Recitation Math 001 - Term 221 (26166)Документ36 страницRecitation Math 001 - Term 221 (26166)Ma NaОценок пока нет
- Drug Addiction Final (Term Paper)Документ15 страницDrug Addiction Final (Term Paper)Dessa Patiga IIОценок пока нет
- Close Enough To Touch by Victoria Dahl - Chapter SamplerДокумент23 страницыClose Enough To Touch by Victoria Dahl - Chapter SamplerHarlequinAustraliaОценок пока нет
- Pathology of LiverДокумент15 страницPathology of Liverערין גבאריןОценок пока нет