Вам также может понравиться
- Shore-Protection System, Case Study: FRIDAY, APRIL 16, 2021Документ41 страницаShore-Protection System, Case Study: FRIDAY, APRIL 16, 2021SSОценок пока нет
- Mathcad - Anexa - 1Документ6 страницMathcad - Anexa - 1SSОценок пока нет
- (16 17) OptimizationДокумент29 страниц(16 17) OptimizationSSОценок пока нет
- ActiuniДокумент533 страницыActiuniSSОценок пока нет
- PythiaДокумент29 страницPythiaSSОценок пока нет
- b2522721x IrДокумент223 страницыb2522721x IrSSОценок пока нет
- Pendul MetraДокумент126 страницPendul MetraSSОценок пока нет
- Prof - Igarashi July27 APSS2010Документ11 страницProf - Igarashi July27 APSS2010SSОценок пока нет
- Prof - Ramaswamy July17 APSS2010Документ20 страницProf - Ramaswamy July17 APSS2010SSОценок пока нет
- CE 3310 - Module 3Документ1 страницаCE 3310 - Module 3SSОценок пока нет
- CE 3310 Assignment 2Документ1 страницаCE 3310 Assignment 2SSОценок пока нет
- Assignment 6Документ1 страницаAssignment 6SSОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- FULLTEXT01Документ246 страницFULLTEXT01rayzo2182Оценок пока нет
- UOP Merox Chapter PDFДокумент12 страницUOP Merox Chapter PDFrohl55Оценок пока нет
- Bruce E. Depalma: N-Machine: Extraction of Electrical Energy Directly From Space: The N-MachineДокумент7 страницBruce E. Depalma: N-Machine: Extraction of Electrical Energy Directly From Space: The N-MachinebanzailoicОценок пока нет
- How To Avoid Wastage of EnergyДокумент1 страницаHow To Avoid Wastage of EnergyNazrawi IJobsОценок пока нет
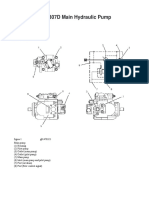
- Cat 307D Main Pump OperationДокумент3 страницыCat 307D Main Pump Operationkahandawala100% (1)
- Form V - Sugar - UnitДокумент11 страницForm V - Sugar - UnitKiran KaleОценок пока нет
- Zentech Jackup Rig Design R 550D PDFДокумент8 страницZentech Jackup Rig Design R 550D PDFGiang Nguyen NinhОценок пока нет
- 2 - Cable Lugs CatalogДокумент36 страниц2 - Cable Lugs CatalogSanjay GandhiОценок пока нет
- Geometric and Physical Optics: InterferenceДокумент35 страницGeometric and Physical Optics: InterferenceHelenОценок пока нет
- 1.TareaParticipacion 2do - ParcialДокумент19 страниц1.TareaParticipacion 2do - ParcialLeonardo EstradaОценок пока нет
- MC 10206242 0001Документ8 страницMC 10206242 0001Yang MaОценок пока нет
- BMW - Us X1 - 2015Документ66 страницBMW - Us X1 - 2015Alex PaunaОценок пока нет
- Esm-48100u2 v100r022c91 User ManualДокумент49 страницEsm-48100u2 v100r022c91 User ManualBiniVincentОценок пока нет
- 16operation StartingadieselengineДокумент76 страниц16operation StartingadieselengineVijay HanchinalОценок пока нет
- Ch14HW AllДокумент9 страницCh14HW Alldhiru12314Оценок пока нет
- EPSRC Thermal Management Sheffield Drying Tech Feb 2010 PDFДокумент50 страницEPSRC Thermal Management Sheffield Drying Tech Feb 2010 PDFVampireSuicideОценок пока нет
- Ultra Cote 401 HsДокумент3 страницыUltra Cote 401 HsGilbert Dela Serna IIОценок пока нет
- mayada5977 مهمДокумент7 страницmayada5977 مهمAmmar Al-KindyОценок пока нет
- What Is Pump Priming and Why It Is Required With PDFДокумент9 страницWhat Is Pump Priming and Why It Is Required With PDFAnas Al’BazzazОценок пока нет
- Air Circuit Breakers For The 21st Century: Catalogue No.'00-P55EДокумент4 страницыAir Circuit Breakers For The 21st Century: Catalogue No.'00-P55EAsif ShahОценок пока нет
- 1SDC210058L0201 Sace Tmax XTДокумент8 страниц1SDC210058L0201 Sace Tmax XTGrzegorz Greg KrukОценок пока нет
- Pages From Chapter 17-11Документ10 страницPages From Chapter 17-11taОценок пока нет
- 356850-103 QRefGde Eltek-Power-Sys 1v0 (1) ELECTRICOДокумент36 страниц356850-103 QRefGde Eltek-Power-Sys 1v0 (1) ELECTRICORomi Raof67% (3)
- National Electrical Safety Code OverviewДокумент15 страницNational Electrical Safety Code OverviewLuis MurilloОценок пока нет
- Colfax Mechanical Seal LeakageДокумент4 страницыColfax Mechanical Seal Leakagesoumya19800000000Оценок пока нет
- Diesel Generator Set: Multiphase Corporation Co., LTDДокумент6 страницDiesel Generator Set: Multiphase Corporation Co., LTDTreeta chanalОценок пока нет
- MES ManualДокумент122 страницыMES ManualDenis AlfinОценок пока нет
- WTP NotesДокумент9 страницWTP Notessanjee2Оценок пока нет
- 2002 Physics NQE QuestionsДокумент7 страниц2002 Physics NQE QuestionskarxriОценок пока нет
- A New Development in Completion Methods - The Limited Entry TechniqueДокумент8 страницA New Development in Completion Methods - The Limited Entry TechniqueJosé TimanáОценок пока нет