Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- DSynchronize (ENG)Документ3 страницыDSynchronize (ENG)Rekha Rajarajan100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
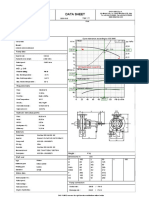
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Документ3 страницыData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Business Logic Module 1Документ5 страницBusiness Logic Module 1Cassandra VenecarioОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Jungles & SavannasДокумент80 страницJungles & SavannasJessica100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Electronics 12 00811Документ11 страницElectronics 12 00811Amber MishraОценок пока нет
- N6867e PXLP 3000Документ7 страницN6867e PXLP 3000talaporriОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- DICKSON KT800/802/803/804/856: Getting StartedДокумент6 страницDICKSON KT800/802/803/804/856: Getting StartedkmpoulosОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- High Performance Vector Control SE2 Series InverterДокумент9 страницHigh Performance Vector Control SE2 Series InverterhanazahrОценок пока нет
- Tensile Strength of Ferro Cement With Respect To Specific SurfaceДокумент3 страницыTensile Strength of Ferro Cement With Respect To Specific SurfaceheminОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Introduction To SCRДокумент19 страницIntroduction To SCRAlbin RobinОценок пока нет
- EVSДокумент3 страницыEVSSuyash AgrawalОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Abstract Cohort 1 Clin Psych FZ 20220323Документ31 страницаAbstract Cohort 1 Clin Psych FZ 20220323Azizah OthmanОценок пока нет
- Email ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarДокумент6 страницEmail ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarJêmš NavikОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Guia Instalacion APP Huawei Fusion HmeДокумент4 страницыGuia Instalacion APP Huawei Fusion Hmecalinp72Оценок пока нет
- AB-005-2020 Dated 10.09.2020 (SKF-Prestine)Документ3 страницыAB-005-2020 Dated 10.09.2020 (SKF-Prestine)AliasgarОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Postmodernism in Aha! MovieДокумент2 страницыPostmodernism in Aha! MovieSayma AkterОценок пока нет
- An Overview and Framework For PD Backtesting and BenchmarkingДокумент16 страницAn Overview and Framework For PD Backtesting and BenchmarkingCISSE SerigneОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Surge Arrester PresentationДокумент63 страницыSurge Arrester PresentationRamiro FelicianoОценок пока нет
- Bohler Dcms T-MCДокумент1 страницаBohler Dcms T-MCFlaviu-Andrei AstalisОценок пока нет
- Backward Forward PropogationДокумент19 страницBackward Forward PropogationConrad WaluddeОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeДокумент10 страницThe Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeRaghvendra kОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Handbook+for+Participants+ +GCC+TeenДокумент59 страницHandbook+for+Participants+ +GCC+Teenchloe.2021164Оценок пока нет
- APPSC GROUP 4 RESULTS 2012 - Khammam District Group 4 Merit ListДокумент824 страницыAPPSC GROUP 4 RESULTS 2012 - Khammam District Group 4 Merit ListReviewKeys.comОценок пока нет
- GARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergДокумент42 страницыGARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergRanjan KumarОценок пока нет
- Huawei Switch - Service - ConfigДокумент5 страницHuawei Switch - Service - ConfigTranHuuPhuocОценок пока нет
- Pedagogical Leadership. Baird - CoughlinДокумент5 страницPedagogical Leadership. Baird - CoughlinChyta AnindhytaОценок пока нет
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsДокумент1 страницаClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- IFN 554 Week 3 Tutorial v.1Документ19 страницIFN 554 Week 3 Tutorial v.1kitkataus0711Оценок пока нет
- SeparexgeneralbrochureДокумент4 страницыSeparexgeneralbrochurewwl1981Оценок пока нет
- ANSI AAMI ST63 2002 - Sterilization of Healthcare Products - Dry HeatДокумент54 страницыANSI AAMI ST63 2002 - Sterilization of Healthcare Products - Dry HeatGraciane TagliettiОценок пока нет