Вам также может понравиться
- NOTES On KayachikitsaДокумент5 страницNOTES On KayachikitsaSurendra Saini0% (1)
- Framemaker - Help 2019 PDFДокумент908 страницFramemaker - Help 2019 PDFMayur100% (1)
- BRKSEC-3020 Advanced FirewallsДокумент200 страницBRKSEC-3020 Advanced FirewallsJin ParkОценок пока нет
- The Stranger CommentaryДокумент5 страницThe Stranger Commentaryalonso93Оценок пока нет
- Art of The Pen PDFДокумент4 страницыArt of The Pen PDFromeoОценок пока нет
- FCE Writing GuideДокумент44 страницыFCE Writing GuideAmparo Amorena100% (2)
- SQL Performance ExplainedДокумент122 страницыSQL Performance Explainedi070174862Оценок пока нет
- State Management With React Hooks No Redux or Context Api 8b3035ceecf8Документ17 страницState Management With React Hooks No Redux or Context Api 8b3035ceecf8Benjamin DiazОценок пока нет
- JavaДокумент94 страницыJavaAbhishekGuptaSarma67% (3)
- Math 10 Sample ExamДокумент4 страницыMath 10 Sample ExamGiee De GuzmanОценок пока нет
- APPWEEKK6Документ27 страницAPPWEEKK6pp7270Оценок пока нет
- 492 Study Report: Engin Deniz Alpman June 2, 2017Документ29 страниц492 Study Report: Engin Deniz Alpman June 2, 2017yuyiipОценок пока нет
- Project Source CodeДокумент18 страницProject Source CodeBenny BavОценок пока нет
- Java Assignments Helpful For BeginnersДокумент27 страницJava Assignments Helpful For BeginnersDieselОценок пока нет
- Oop Assi EmpoyeeДокумент17 страницOop Assi EmpoyeeJawad NasirОценок пока нет
- Programas JavaДокумент16 страницProgramas JavaBilton NhanissaneОценок пока нет
- Appweekk 6Документ39 страницAppweekk 6pp7270Оценок пока нет
- Basic FunctionalitiesДокумент20 страницBasic FunctionalitiesIPS Siddharth.BОценок пока нет
- New 1Документ9 страницNew 1Bạn QuanhОценок пока нет
- Code Trai TimДокумент5 страницCode Trai TimPhương ThảoОценок пока нет
- JsДокумент2 страницыJsAbdalrahman .E MahfouzОценок пока нет
- Assignment# 3Документ6 страницAssignment# 3Haider AbbasОценок пока нет
- Lab6 OopsДокумент13 страницLab6 OopsutkrishtОценок пока нет
- Connection Polling Transactions Result Set TypesДокумент31 страницаConnection Polling Transactions Result Set TypesPrabhakar PrabhuОценок пока нет
- CODIGOДокумент5 страницCODIGOdfdfОценок пока нет
- Tài LiệuДокумент17 страницTài Liệuahaivlog1210Оценок пока нет
- JAVA AND JAVAUI HANDSON - Hackerrank Assessments-1 PDFДокумент15 страницJAVA AND JAVAUI HANDSON - Hackerrank Assessments-1 PDFtkkhhaarree0% (1)
- CodetraitimdapДокумент6 страницCodetraitimdapVo Thi Anh Nguyet (FPL HCM)Оценок пока нет
- Diy' ¿ÔДокумент5 страницDiy' ¿ÔNguyễn PhátОценок пока нет
- Double CodeДокумент9 страницDouble CodeHồng NhậtОценок пока нет
- Ideone xRIZIKДокумент6 страницIdeone xRIZIKHồng NhậtОценок пока нет
- Code Trái Tim TH Khoa LýДокумент13 страницCode Trái Tim TH Khoa LýminhngocchuyenvantbОценок пока нет
- SRICHARAN SRIDHAR 20MIA1014 - PSOOP - Java - IPS9Документ9 страницSRICHARAN SRIDHAR 20MIA1014 - PSOOP - Java - IPS9Sricharan SridharОценок пока нет
- Advance Java Program Final..Документ50 страницAdvance Java Program Final..chaudhariyashraj2710Оценок пока нет
- Trai Tim Co AnhДокумент22 страницыTrai Tim Co AnhAlan AlanОценок пока нет
- UntitledДокумент6 страницUntitledSabrina Ledezma VillarroelОценок пока нет
- Ikrimatul KhotimahДокумент7 страницIkrimatul KhotimahArinyNewbieОценок пока нет
- Code Trái TimДокумент6 страницCode Trái TimKiêu Anh TranОценок пока нет
- Object and Class 2Документ42 страницыObject and Class 2Sherwin LimboОценок пока нет
- Java Programming FileДокумент71 страницаJava Programming Filedurga_prasad11511Оценок пока нет
- The Output From This Program IsДокумент10 страницThe Output From This Program IsriyaОценок пока нет
- Write A Program To Demonstrate Use of Implementing InterfacesДокумент14 страницWrite A Program To Demonstrate Use of Implementing Interfacesnithya elysiumОценок пока нет
- Kerangka ProgramДокумент19 страницKerangka Programhendrik haryuОценок пока нет
- Eroju Java Anadu Repu Bava AntaduДокумент36 страницEroju Java Anadu Repu Bava AntaduvnraidsОценок пока нет
- Bit 2204a Bbit 310 Bac 2201 BSD 2107 Bisf 2201 Java Programming RayfrankmuriithiДокумент13 страницBit 2204a Bbit 310 Bac 2201 BSD 2107 Bisf 2201 Java Programming RayfrankmuriithiFrank RayОценок пока нет
- Code Trai Tim Thêm CHДокумент12 страницCode Trai Tim Thêm CHNguyen Thanh Son (K18 HCM)Оценок пока нет
- Player DenisДокумент1 страницаPlayer Deniseduardojsa.24.07Оценок пока нет
- APP AssignmentДокумент18 страницAPP AssignmentabhiseshatamilgamerОценок пока нет
- HB - Games TestДокумент4 страницыHB - Games TestMarcelino LópezОценок пока нет
- Nguyen Tri To AnДокумент6 страницNguyen Tri To AnLoc Dinh NguyenОценок пока нет
- Light: Void Int Long Long LongДокумент6 страницLight: Void Int Long Long LongotarVEVOОценок пока нет
- Java QB2Документ14 страницJava QB2Amaan ShaikhОценок пока нет
- Btap JavaДокумент11 страницBtap JavaHuyền Trân NguyễnОценок пока нет
- PHP AssignmentДокумент14 страницPHP AssignmentAdeelОценок пока нет
- FRSTДокумент3 страницыFRSTNagarajОценок пока нет
- 20mis0282 VL2021220500512 Ast01Документ21 страница20mis0282 VL2021220500512 Ast01Hrithik khanna K BОценок пока нет
- Java Lab ManualДокумент51 страницаJava Lab ManualsajeerОценок пока нет
- TotinhngyeuДокумент7 страницTotinhngyeuNguyen Duy NgocОценок пока нет
- What Is A ClassДокумент9 страницWhat Is A ClassEthio JoyОценок пока нет
- Object Oriented ProgrammingДокумент6 страницObject Oriented Programmings1062230092Оценок пока нет
- Inheritance 8: Object Oriented Programming in Java 1Документ13 страницInheritance 8: Object Oriented Programming in Java 1Bushra FatehОценок пока нет
- Java LabДокумент127 страницJava LabRuhi Khan100% (1)
- Assignment 01Документ7 страницAssignment 01Khaled HaniaОценок пока нет
- Programa Class: Using Using Using Using Namespace Class Double Public Void Double Double DoubleДокумент5 страницPrograma Class: Using Using Using Using Namespace Class Double Public Void Double Double DoubleFabian PadillaОценок пока нет
- Uas Praktikum Pemprograman Berorientasi ObjekДокумент18 страницUas Praktikum Pemprograman Berorientasi ObjekSri RahayuОценок пока нет
- Chen 2015Документ10 страницChen 2015Surendra SainiОценок пока нет
- PicДокумент1 страницаPicSurendra SainiОценок пока нет
- Dr. Manoj Gupta STPДокумент2 страницыDr. Manoj Gupta STPSurendra SainiОценок пока нет
- 1Документ4 страницы1Surendra SainiОценок пока нет
- 07Документ4 страницы07Surendra SainiОценок пока нет
- Ann ToolДокумент8 страницAnn ToolSurendra SainiОценок пока нет
- Sutr Id Athe Good Agreement Bfhs Uofiwo Beeaj 4qsjkДокумент1 страницаSutr Id Athe Good Agreement Bfhs Uofiwo Beeaj 4qsjkSurendra SainiОценок пока нет
- List of Obsolete Items For LabДокумент1 страницаList of Obsolete Items For LabSurendra SainiОценок пока нет
- Cloze Test Advance-KeyДокумент5 страницCloze Test Advance-KeyHieu To QuangОценок пока нет
- Language and SymbolsДокумент3 страницыLanguage and SymbolsJunior RalfОценок пока нет
- This Is Very LongДокумент16 страницThis Is Very LongCuc PansatОценок пока нет
- Senior High School Student Permanent Record: Republic of The Philippines Department of EducationДокумент3 страницыSenior High School Student Permanent Record: Republic of The Philippines Department of EducationJennisRollenAranetaMaagadОценок пока нет
- Mission U500 Improvement Data Transfer Package Insert-02232017Документ1 страницаMission U500 Improvement Data Transfer Package Insert-02232017JanОценок пока нет
- Windows Returns Wrong IP Address As Source IPДокумент3 страницыWindows Returns Wrong IP Address As Source IP廖道恩Оценок пока нет
- Assignment Day-4Документ7 страницAssignment Day-4Lovita SharmaОценок пока нет
- HARMAN Employee Referral ProgramДокумент2 страницыHARMAN Employee Referral ProgramKrishna SrivastavaОценок пока нет
- AntakiДокумент614 страницAntakiLina CorreaОценок пока нет
- Skills 30-36 VerbsДокумент16 страницSkills 30-36 Verbsapi-298565229Оценок пока нет
- October 5 2014Документ2 страницыOctober 5 2014api-266994866Оценок пока нет
- Pre Test For LC ReviewДокумент4 страницыPre Test For LC ReviewLOUIE ALVAREZОценок пока нет
- 3 Tier Campus LAN ConfigurationДокумент26 страниц3 Tier Campus LAN Configurationachraf trabelsiОценок пока нет
- Software Development Engineer in TestДокумент5 страницSoftware Development Engineer in TestBharath MathivananОценок пока нет
- Design of Sensor Nodes in Underwater Sensor Networks: Yu Yang, Zhang Xiaomin, Peng BO, Fu YujingДокумент5 страницDesign of Sensor Nodes in Underwater Sensor Networks: Yu Yang, Zhang Xiaomin, Peng BO, Fu Yujinghari9923Оценок пока нет
- CSA Unit 6 TemperatureAction FRQДокумент7 страницCSA Unit 6 TemperatureAction FRQKalpita AcharyaОценок пока нет
- RIp Van Winkle A2 Teachers NotesДокумент3 страницыRIp Van Winkle A2 Teachers NotesLuisa RodríguezОценок пока нет
- Al-Quran Juz 1Документ28 страницAl-Quran Juz 1Anang FathurahmanОценок пока нет
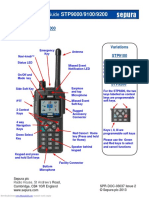
- STP 9000Документ4 страницыSTP 9000Ray BannyОценок пока нет
- Clauses of Contrast and Purpose Whatever, Whenever, Etc.Документ5 страницClauses of Contrast and Purpose Whatever, Whenever, Etc.CARLOS VILLAMIZAR MONROYОценок пока нет
- Sex or Gender Identity? Understanding Children's Reading Choices and MotivationДокумент12 страницSex or Gender Identity? Understanding Children's Reading Choices and MotivationNani JuraidaОценок пока нет
- Nullable Reference Types - Microsoft DocsДокумент9 страницNullable Reference Types - Microsoft DocssanamОценок пока нет
- Adams, Beginning To Read, 1 Putting Word Recognition in PerspectiveДокумент11 страницAdams, Beginning To Read, 1 Putting Word Recognition in PerspectiveRalbolОценок пока нет