Вам также может понравиться
- Radiology Physics Board Recalls 2005Документ14 страницRadiology Physics Board Recalls 2005Turki A. Saad100% (2)
- Synchronous GeneratorsДокумент62 страницыSynchronous GeneratorsAkira ZamudioОценок пока нет
- Reinforced Concrete Design of A 5 Storey Seminary Main BuildingДокумент117 страницReinforced Concrete Design of A 5 Storey Seminary Main Buildingjedsclement100% (1)
- Standard Method For Making and Curing Cubes Made From Pre-Bagged Grouts and Polymer Modified Mortars PDFДокумент7 страницStandard Method For Making and Curing Cubes Made From Pre-Bagged Grouts and Polymer Modified Mortars PDFVCОценок пока нет
- Hydraulics Coaching 3Документ21 страницаHydraulics Coaching 3lenard dongsal100% (1)
- Electrical Power System Analysis 4. The Impedance Model and Network CalculationsДокумент55 страницElectrical Power System Analysis 4. The Impedance Model and Network CalculationsEng Talal33% (3)
- Foundations of Electromagnetic Compatibility: with Practical ApplicationsОт EverandFoundations of Electromagnetic Compatibility: with Practical ApplicationsОценок пока нет
- Engine Number Guide (2-Page)Документ2 страницыEngine Number Guide (2-Page)Abdul KhaliqОценок пока нет
- Unit 6 Alternator (Synchronous Generator) : StructureДокумент29 страницUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Modern Electrical Installation for Craft StudentsОт EverandModern Electrical Installation for Craft StudentsРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- DC Motor Calculations 2004Документ27 страницDC Motor Calculations 2004erkamlakar2234Оценок пока нет
- Flare Tip FailureДокумент4 страницыFlare Tip FailuremohammadazraiОценок пока нет
- DC Generator PDFДокумент108 страницDC Generator PDFSaeed Osman MohamedОценок пока нет
- AC Induction Motor FundamentalsДокумент24 страницыAC Induction Motor Fundamentalsrohtahir100% (3)
- UNU - Geothermal Well TestingДокумент30 страницUNU - Geothermal Well TestingZakariyaОценок пока нет
- Power Systems Modelling and Fault Analysis: Theory and PracticeОт EverandPower Systems Modelling and Fault Analysis: Theory and PracticeРейтинг: 2 из 5 звезд2/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesОценок пока нет
- Synchronous Machine: Generator MotorДокумент14 страницSynchronous Machine: Generator Motorhafiz_jaaffar100% (1)
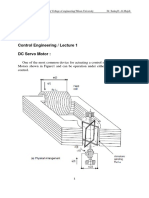
- Control Engineering / Lecture 1 DC Servo MotorДокумент7 страницControl Engineering / Lecture 1 DC Servo Motorjin kazamaОценок пока нет
- Synchronous Generator Construction & Modeling: D DR - Firas Mohamme Power Year Electrical 4Документ19 страницSynchronous Generator Construction & Modeling: D DR - Firas Mohamme Power Year Electrical 4Ahmad AliОценок пока нет
- Backup of Lecture 3 and 4.wbkДокумент12 страницBackup of Lecture 3 and 4.wbkJames musambakiОценок пока нет
- Kosow PRB CodingДокумент30 страницKosow PRB CodingTasnim AhmadОценок пока нет
- TrigonometryДокумент3 страницыTrigonometryJohnCarloTigue0% (1)
- Electric Machine-I (Course Code: EE 551) Chapter - 3 (DC Generator) Lecture No.10Документ20 страницElectric Machine-I (Course Code: EE 551) Chapter - 3 (DC Generator) Lecture No.10Deepak ThapaОценок пока нет
- Synchronous Machines Rev 1Документ9 страницSynchronous Machines Rev 1Nasri JamaludinОценок пока нет
- DC GenДокумент74 страницыDC GenAhmed58seribegawan100% (1)
- EEE II II EM IInotes PDFДокумент9 страницEEE II II EM IInotes PDFYamini KОценок пока нет
- DC Motor Calculations 2004 PDFДокумент27 страницDC Motor Calculations 2004 PDFAlbert Cereno SerranoОценок пока нет
- Chapter-5 SlidesДокумент50 страницChapter-5 SlidesdfОценок пока нет
- EE-250-EMF-Lec-8-Synchronous GeneratorsДокумент54 страницыEE-250-EMF-Lec-8-Synchronous GeneratorsNew GenerationОценок пока нет
- EM-3 Unit-4 UpdatedДокумент22 страницыEM-3 Unit-4 UpdatedPrathap VuyyuruОценок пока нет
- Remains: 1 Cos S I V, J, .Документ10 страницRemains: 1 Cos S I V, J, .Rz HidayatОценок пока нет
- Synchronous Machine Characteristics and OperationДокумент20 страницSynchronous Machine Characteristics and Operationhozipek5599Оценок пока нет
- Rizal Technological UniversityДокумент5 страницRizal Technological UniversityChara GalaОценок пока нет
- DC Motor Calculations - National InstrumentsДокумент22 страницыDC Motor Calculations - National InstrumentsJosé PerezОценок пока нет
- Generator Characteristics: 1. No-Load Saturation Characteristic (E /I)Документ24 страницыGenerator Characteristics: 1. No-Load Saturation Characteristic (E /I)Uma SaluvaОценок пока нет
- Experiment - 06 To Study Magnetisation Characteristics of DC Shunt Generator.Документ9 страницExperiment - 06 To Study Magnetisation Characteristics of DC Shunt Generator.charanrck10Оценок пока нет
- EM-3 Unit-3Документ14 страницEM-3 Unit-3Prathap Vuyyuru0% (1)
- Chapter Five Synchronous MachinesДокумент23 страницыChapter Five Synchronous MachinesetayhailuОценок пока нет
- Chapter 5 Synchronous MachinesДокумент27 страницChapter 5 Synchronous MachinesIfit PrabowoОценок пока нет
- U6 L42 - Blondel'sTwo Reaction TheoryДокумент7 страницU6 L42 - Blondel'sTwo Reaction Theorykjel reida jøssanОценок пока нет
- I JX I JX R I V E: C D C DДокумент119 страницI JX I JX R I V E: C D C DCharlton ChristОценок пока нет
- Generators ACDCДокумент5 страницGenerators ACDCCarl Austin BaybayОценок пока нет
- V and Inverted V Curve PDFДокумент3 страницыV and Inverted V Curve PDFAman AnsariОценок пока нет
- Machines Tutorial Sheet #6 (2024) Answer KeysДокумент3 страницыMachines Tutorial Sheet #6 (2024) Answer KeysmechanicsstudentОценок пока нет
- Chapter 7: D.C MACHINES: INTRODUCTION: DC Generators and Motors Are Collectively Known AsДокумент13 страницChapter 7: D.C MACHINES: INTRODUCTION: DC Generators and Motors Are Collectively Known AsJayakumar JainОценок пока нет
- EM-2 Unit-4 Notes (R20)Документ33 страницыEM-2 Unit-4 Notes (R20)tripgokarna08Оценок пока нет
- Electrical Machines - I Lab Manual: Anurag College of EngineeringДокумент61 страницаElectrical Machines - I Lab Manual: Anurag College of EngineeringraniaОценок пока нет
- Investigation of Frequency Reduction Behavior On Three Phase Synchronous Generator and TransformerДокумент17 страницInvestigation of Frequency Reduction Behavior On Three Phase Synchronous Generator and TransformerJorge Luis Sarmiento PiersantelliОценок пока нет
- Power Systems TheoryДокумент13 страницPower Systems TheoryGitta JoshuaОценок пока нет
- Chapter 5 SolutionДокумент4 страницыChapter 5 Solutionravi474Оценок пока нет
- Voltage Regulation of Three-Phase Alternator: No Load Full Load Full Load o T T o TДокумент8 страницVoltage Regulation of Three-Phase Alternator: No Load Full Load Full Load o T T o TethanОценок пока нет
- Windows-1256 - Synchronous Generator Operation PDFДокумент12 страницWindows-1256 - Synchronous Generator Operation PDFNWALLLОценок пока нет
- 5695 45 137 Series Universal Ac GenДокумент6 страниц5695 45 137 Series Universal Ac GenaldrinОценок пока нет
- Project Report EssДокумент10 страницProject Report Essprajeet95Оценок пока нет
- Practice Problems - Synch - MachinesДокумент3 страницыPractice Problems - Synch - MachinesBea DucaoОценок пока нет
- Synchronous Machine Armature WindingsДокумент32 страницыSynchronous Machine Armature Windingsiniyavan3119100% (1)
- 02 DC Machines LabДокумент8 страниц02 DC Machines LabAndubekaОценок пока нет
- DC MachinesДокумент102 страницыDC MachinesmohamedashrafkotpОценок пока нет
- ELEG 310L Prelab 4Документ3 страницыELEG 310L Prelab 4ghaliaОценок пока нет
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesОт EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesОценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Electric Generator - The Free EncyclopediaДокумент9 страницElectric Generator - The Free EncyclopediaMohammed AlhakeemiОценок пока нет
- Protection of BusbarДокумент13 страницProtection of BusbarMohammed AlhakeemiОценок пока нет
- Magntizing Inrush CurrentДокумент25 страницMagntizing Inrush CurrentMohammed AlhakeemiОценок пока нет
- Magntizing Inrush CurrentДокумент25 страницMagntizing Inrush CurrentMohammed AlhakeemiОценок пока нет
- Protection of BusbarДокумент13 страницProtection of BusbarMohammed AlhakeemiОценок пока нет
- QP Nov - 2010 4 1 Eee PsocДокумент8 страницQP Nov - 2010 4 1 Eee PsocMohammed AlhakeemiОценок пока нет
- Inrush Current in TransformerДокумент8 страницInrush Current in TransformerMohammed AlhakeemiОценок пока нет
- Protection of BusbarДокумент13 страницProtection of BusbarMohammed AlhakeemiОценок пока нет
- Section 4 2 Impedance and Admittance Matricies PackageДокумент25 страницSection 4 2 Impedance and Admittance Matricies PackageMohammed AlhakeemiОценок пока нет
- Section 4 2 Impedance and Admittance Matricies PackageДокумент25 страницSection 4 2 Impedance and Admittance Matricies PackageMohammed AlhakeemiОценок пока нет
- DE59 - Electronic Instrumentation and MeasurementДокумент17 страницDE59 - Electronic Instrumentation and MeasurementMohammed AlhakeemiОценок пока нет
- Eee-Vii-Industrial Drives and Applications (10ee74) - NotesДокумент90 страницEee-Vii-Industrial Drives and Applications (10ee74) - NotesMohammed AlhakeemiОценок пока нет
- 10 - Chapter 3 PDFДокумент15 страниц10 - Chapter 3 PDFRavindra AngalОценок пока нет
- A General Algorithm For Building Z-Matrix Based On Transitional MatricesДокумент4 страницыA General Algorithm For Building Z-Matrix Based On Transitional MatricesMohammed AlhakeemiОценок пока нет
- ZbusДокумент37 страницZbusSiva GuruОценок пока нет
- A General Algorithm For Building Z-Matrix Based On Transitional MatricesДокумент4 страницыA General Algorithm For Building Z-Matrix Based On Transitional MatricesMohammed AlhakeemiОценок пока нет
- Im Speed Control PDFДокумент64 страницыIm Speed Control PDFseshubabu_999Оценок пока нет
- Dynamic Braking of Induction MotorsДокумент6 страницDynamic Braking of Induction MotorsHitesh KumarОценок пока нет
- Characteristics of DC Series MotorДокумент2 страницыCharacteristics of DC Series MotorMohammed AlhakeemiОценок пока нет
- Y Bus Chap3Документ19 страницY Bus Chap3Jhala MahipalОценок пока нет
- Characteristics of DC Shunt MotorДокумент2 страницыCharacteristics of DC Shunt MotorMohammed AlhakeemiОценок пока нет
- Characteristics of DC Shunt MotorДокумент2 страницыCharacteristics of DC Shunt MotorMohammed AlhakeemiОценок пока нет
- Guru Jambheshwar University of Science and Technology, HisarДокумент42 страницыGuru Jambheshwar University of Science and Technology, HisarSwati SharmaОценок пока нет
- Gestión de Formación Profesional Integral Procedimiento Desarrollo Curricular Guía de Aprendizaje 1. Identificación de La Guia de AprenizajeДокумент9 страницGestión de Formación Profesional Integral Procedimiento Desarrollo Curricular Guía de Aprendizaje 1. Identificación de La Guia de AprenizajeMilena Sánchez LópezОценок пока нет
- GEC 17 Lesson 1 Introduction To STSДокумент15 страницGEC 17 Lesson 1 Introduction To STSJhupit Ganihay100% (1)
- Geotechnical Variation of London Clay Across Central LondonДокумент12 страницGeotechnical Variation of London Clay Across Central LondonChiaraОценок пока нет
- Dimensions Dog BoneДокумент5 страницDimensions Dog BonedeathesОценок пока нет
- First-Order Linear Fuzzy Differential Equations On The Space of Linearly Correlated Fuzzy NumbersДокумент33 страницыFirst-Order Linear Fuzzy Differential Equations On The Space of Linearly Correlated Fuzzy NumbersHo Nhat NamОценок пока нет
- Astm E0169 16Документ6 страницAstm E0169 16archanaОценок пока нет
- Polymer Melt Indexer (Extrusion Plastometer) PDFДокумент138 страницPolymer Melt Indexer (Extrusion Plastometer) PDFjrlr65Оценок пока нет
- McGraw-Edison SPI Lighting Power Drawer CCL Series Brochure 1982Документ40 страницMcGraw-Edison SPI Lighting Power Drawer CCL Series Brochure 1982Alan MastersОценок пока нет
- ML12142A123Документ58 страницML12142A123Mohammed RiyaazОценок пока нет
- Sensor Presión Keller Pa26y - 3852Документ2 страницыSensor Presión Keller Pa26y - 3852benditasea3352Оценок пока нет
- Micro-Urbanism: Chi Ti-Nan Develops A Project To Preserve Hong Kong Coastline Tai Long Sai WanДокумент3 страницыMicro-Urbanism: Chi Ti-Nan Develops A Project To Preserve Hong Kong Coastline Tai Long Sai WanAr Nizya NoushadОценок пока нет
- JL Torero - Buoyancy Effects On Smoldering of Polyurethane FoamДокумент229 страницJL Torero - Buoyancy Effects On Smoldering of Polyurethane FoamIsraelОценок пока нет
- Final Test: Grade: 3 Time: 30 Minutes Your Name: .. ScoreДокумент8 страницFinal Test: Grade: 3 Time: 30 Minutes Your Name: .. ScoreThu NguyenОценок пока нет
- MathsДокумент2 страницыMathsAditya Singh PatelОценок пока нет
- Ak-Cc 460Документ30 страницAk-Cc 460Øyvind SkulstadОценок пока нет
- Pipesim 2006.1 Fundamentals GasliftДокумент13 страницPipesim 2006.1 Fundamentals GasliftamulyanaОценок пока нет
- Geo SoltexДокумент1 страницаGeo SoltexWaleed Barakat MariaОценок пока нет
- 1.2N Logical EquivalenceДокумент11 страниц1.2N Logical EquivalenceTrang NguyễnОценок пока нет
- Helmreich Cut Up Sonic TransductionДокумент9 страницHelmreich Cut Up Sonic TransductiongrundumОценок пока нет
- PAPER SIDIQ ICOS FixДокумент7 страницPAPER SIDIQ ICOS FixAtika AssalafiyahОценок пока нет
- MALVINO & BATES Chapter 08Документ29 страницMALVINO & BATES Chapter 08Reece RevosaОценок пока нет