Вам также может понравиться
- Geekytheory ComДокумент7 страницGeekytheory ComMaquin FirefightОценок пока нет
- Carrocería de Un AutomóvilДокумент7 страницCarrocería de Un AutomóvilMaquin FirefightОценок пока нет
- Control Digital Con MatlabДокумент176 страницControl Digital Con MatlabelijbbОценок пока нет
- Solucion Examen ParcialДокумент7 страницSolucion Examen ParcialMaquin FirefightОценок пока нет
- Uso Del Comando SweepДокумент8 страницUso Del Comando SweepMaquin FirefightОценок пока нет
- Capitulo 9Документ46 страницCapitulo 9Maquin Firefight0% (1)
- Laboratorio 1 - 2v3Документ13 страницLaboratorio 1 - 2v3Maquin FirefightОценок пока нет
- Cálculos y ResultadosДокумент11 страницCálculos y ResultadosMaquin FirefightОценок пока нет
- E Ejercicios Resueltos Analisis Lineal Transformada de FourierДокумент5 страницE Ejercicios Resueltos Analisis Lineal Transformada de FourierMaquin FirefightОценок пока нет
- Cálculos y ResultadosДокумент11 страницCálculos y ResultadosMaquin FirefightОценок пока нет
- Metodos Numericos para CP300Документ1 страницаMetodos Numericos para CP300Maquin FirefightОценок пока нет
- Separata L4Документ5 страницSeparata L4Maquin FirefightОценок пока нет
- Separata L5Документ9 страницSeparata L5Maquin FirefightОценок пока нет
- Laboratorio de Electronic de Pot. 2014-2Документ12 страницLaboratorio de Electronic de Pot. 2014-2GonzaloEsquivesTorrejonОценок пока нет
- Manejo XilinxДокумент141 страницаManejo Xilinxj12Оценок пока нет
- Metodos Numericos para CP300Документ1 страницаMetodos Numericos para CP300Maquin FirefightОценок пока нет
- Cinetica de Cuerpo Rigido en El EspacioДокумент97 страницCinetica de Cuerpo Rigido en El EspacioMaquin FirefightОценок пока нет
- Diodos CaracteristicasДокумент66 страницDiodos CaracteristicasCHUCIОценок пока нет
- Presentacion LaplaceДокумент24 страницыPresentacion LaplaceTomyОценок пока нет
- MemoriasДокумент27 страницMemoriasMaquin FirefightОценок пока нет
- Distribución NormalДокумент3 страницыDistribución NormalKevin JoseОценок пока нет
- Cinematica de Cuerpo Rigido en El EspacioДокумент55 страницCinematica de Cuerpo Rigido en El EspacioALberto Tarazona ValverdeОценок пока нет
- Presentacion LaplaceДокумент24 страницыPresentacion LaplaceTomyОценок пока нет
- UNIDADIIДокумент61 страницаUNIDADIIMaquin FirefightОценок пока нет
- VHDLДокумент88 страницVHDLMaquin Firefight100% (1)
- Clase SoldaduraДокумент30 страницClase SoldaduracesarinarragaОценок пока нет
- MB613Документ4 страницыMB613José G. Ortiz MesíasОценок пока нет
- Capítulo 16 Control Estadístico de CalidadДокумент31 страницаCapítulo 16 Control Estadístico de CalidadMaquin FirefightОценок пока нет
- Combustible Alternativo en Base A Residuos Solidos para La Industria Cementera BolivianaДокумент161 страницаCombustible Alternativo en Base A Residuos Solidos para La Industria Cementera BolivianaLUISFERNANDONINA100% (1)
- Estructura Factorial de La Escala de Satisfacción Con La Vida de DienerДокумент9 страницEstructura Factorial de La Escala de Satisfacción Con La Vida de DienerJorge VillarrealОценок пока нет
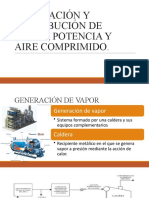
- Generación y Distribución de Vapor, Aire Comprimido y PotenciaДокумент27 страницGeneración y Distribución de Vapor, Aire Comprimido y PotenciaEliОценок пока нет
- EVOLUCION DE LOS PECES CARTILAGINOSOS (1) DefinitivoДокумент62 страницыEVOLUCION DE LOS PECES CARTILAGINOSOS (1) DefinitivoFernando A. RodriguezОценок пока нет
- Absolutismo Democracia y Derecho DivinoДокумент2 страницыAbsolutismo Democracia y Derecho DivinoÁlvaro Rivas Godin100% (3)
- DisciplinarH2 Leonardo JacobДокумент11 страницDisciplinarH2 Leonardo JacobleonardoОценок пока нет
- Necesidades y Percepcion de Los ClientesДокумент5 страницNecesidades y Percepcion de Los ClientesCiro MontielОценок пока нет
- Proceso Exportador ProchileДокумент3 страницыProceso Exportador ProchileRojTap CarlosОценок пока нет
- Teoria y Ejercicios de Calculos Electricos Parte Ii Calculo de CortocircuitoДокумент48 страницTeoria y Ejercicios de Calculos Electricos Parte Ii Calculo de CortocircuitoGiovanny AlvizuОценок пока нет
- Tecnico en Enfermeria 2018Документ2 страницыTecnico en Enfermeria 2018Faraon RamsesОценок пока нет
- Boletín Oficial - 2016-05-06 - 4º SecciónДокумент28 страницBoletín Oficial - 2016-05-06 - 4º SecciónOndRechTacLetMovОценок пока нет
- Anamnesis Nutricional Adolescentes Mujeres: Mg. Esmeralda Hurtado CastroДокумент27 страницAnamnesis Nutricional Adolescentes Mujeres: Mg. Esmeralda Hurtado CastroBlanca Esmeralda HurtadoОценок пока нет
- CLASE 3 Estructura OrganizacionalДокумент63 страницыCLASE 3 Estructura OrganizacionalPaulina Sáez donosoОценок пока нет
- ModelosIntervenciónCuidadoresDiscapacidadДокумент7 страницModelosIntervenciónCuidadoresDiscapacidadDaniela OspinaОценок пока нет
- Historia Suzuki Marine 1965Документ5 страницHistoria Suzuki Marine 1965Alfredo PachecoОценок пока нет
- Manual Del Usuario WixДокумент6 страницManual Del Usuario WixAndrés GarcíaОценок пока нет
- ActLIASP37DBTC6 3 2Документ4 страницыActLIASP37DBTC6 3 2felipe calderonОценок пока нет
- Practica 1docx PDFДокумент5 страницPractica 1docx PDFjohjaniОценок пока нет
- Requisitos - Cta. BNДокумент3 страницыRequisitos - Cta. BNMilagros MtvОценок пока нет
- LA ARQUITECTURA DE SALTA. PERIODO DE LA RESTAURACION NACIONALISTA NEOCOLONIAL 1930 A 1950Документ2 страницыLA ARQUITECTURA DE SALTA. PERIODO DE LA RESTAURACION NACIONALISTA NEOCOLONIAL 1930 A 1950Celeste RochaОценок пока нет
- Examen Parcial - Semana 4 - INV - PRIMER BLOQUE-EVALUACION FORMATIVA - (GRUPO1)Документ12 страницExamen Parcial - Semana 4 - INV - PRIMER BLOQUE-EVALUACION FORMATIVA - (GRUPO1)Dumar Javier Hernandez Piña100% (1)
- Administración 2021-25Документ55 страницAdministración 2021-25Jacintha RamosОценок пока нет
- 202.otura AlakentúДокумент16 страниц202.otura Alakentújerr747100% (5)
- Cafés, tés e infusiones: Procesos de preparaciónДокумент19 страницCafés, tés e infusiones: Procesos de preparaciónNelber RobleroОценок пока нет
- Proyecto Integrador n4Документ13 страницProyecto Integrador n4joseydslvaОценок пока нет
- Aspectos Legales y Bioseguridad en El Uso de Dientes HumanosДокумент96 страницAspectos Legales y Bioseguridad en El Uso de Dientes HumanosKaren GarciaОценок пока нет
- Planificación Talento Humano 3eroДокумент7 страницPlanificación Talento Humano 3eroFranklin Willian Freire GalloОценок пока нет
- Clase 01Документ55 страницClase 01Miguel CruzОценок пока нет
- Imptek - MSDS Cemento AsfálticoДокумент4 страницыImptek - MSDS Cemento Asfálticoestefania charris100% (1)
- Formulación y Nomenclatura de Los Óxidos Ácidos o AnhídridosДокумент3 страницыFormulación y Nomenclatura de Los Óxidos Ácidos o AnhídridosVince M. RondonОценок пока нет