Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
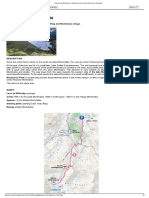
- Way of Agols - Madriu - Department of Promotion and Tourism EncampДокумент2 страницыWay of Agols - Madriu - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Way Pessons - Madriu - Department of Promotion and Tourism EncampДокумент2 страницыWay Pessons - Madriu - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Shelter Ensagents - High Griu - Department of Promotion and Tourism EncampДокумент2 страницыShelter Ensagents - High Griu - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Cofasp Sra For WebДокумент40 страницCofasp Sra For WebDogDylanОценок пока нет
- Way Ensagents - Madriu - Department of Promotion and Tourism EncampДокумент2 страницыWay Ensagents - Madriu - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Cofasp Sra For WebДокумент40 страницCofasp Sra For WebDogDylanОценок пока нет
- Lake Engolasters Road - Department of Promotion and Tourism EncampДокумент2 страницыLake Engolasters Road - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Way of Lake Montmalús - Department of Promotion and Tourism EncampДокумент2 страницыWay of Lake Montmalús - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Pessons Way Circle - Department of Promotion and Tourism EncampДокумент2 страницыPessons Way Circle - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- Way of Abelletes - Pic D'envalira - Department of Promotion and Tourism EncampДокумент2 страницыWay of Abelletes - Pic D'envalira - Department of Promotion and Tourism EncampDogDylanОценок пока нет
- TRL - H2020Документ1 страницаTRL - H2020DogDylanОценок пока нет
- The TRL Scale As A R I Policy Tool - EARTO Recommendations - FinalДокумент17 страницThe TRL Scale As A R I Policy Tool - EARTO Recommendations - FinalDogDylan0% (1)
- Agri Strategypaper Web 1Документ40 страницAgri Strategypaper Web 1DogDylanОценок пока нет
- Rapporto ANVUR SINTESI 20Документ53 страницыRapporto ANVUR SINTESI 20DogDylanОценок пока нет
- Brochure SynergiesДокумент43 страницыBrochure SynergiesDogDylanОценок пока нет
- It CR2015Документ92 страницыIt CR2015DogDylanОценок пока нет
- Facce-Jpi+ SraДокумент52 страницыFacce-Jpi+ SraDogDylanОценок пока нет
- Jpi HDHL SraДокумент64 страницыJpi HDHL SraDogDylanОценок пока нет
- JPI HDHL Vision PaperДокумент25 страницJPI HDHL Vision PaperDogDylanОценок пока нет
- NHM Guide Web en PDFДокумент27 страницNHM Guide Web en PDFDogDylanОценок пока нет
- City Map - 1 PartДокумент1 страницаCity Map - 1 PartDogDylanОценок пока нет
- WINK Trasregional Dimension Territorial Knowledge Management Role UniversitiesДокумент18 страницWINK Trasregional Dimension Territorial Knowledge Management Role UniversitiesDogDylanОценок пока нет
- Guida Belfast PDFДокумент76 страницGuida Belfast PDFDogDylanОценок пока нет
- Wipo Pub 941 2010 050213DLДокумент148 страницWipo Pub 941 2010 050213DLdenghueiОценок пока нет
- SB2012 Top1500 PDFДокумент18 страницSB2012 Top1500 PDFDogDylanОценок пока нет
- AquaCity Cennik 2016 TLAC - ENДокумент2 страницыAquaCity Cennik 2016 TLAC - ENDogDylanОценок пока нет
- UE in Kind Contributions PDFДокумент8 страницUE in Kind Contributions PDFDogDylanОценок пока нет
- Get File PDFДокумент25 страницGet File PDFDogDylanОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Hunt ReportДокумент127 страницHunt ReportasdasfsasadfdsfdfgfdОценок пока нет
- Three Problems of Government Action: Dynamism and InnovationДокумент15 страницThree Problems of Government Action: Dynamism and InnovationMARIA CRISTINA BALODONGОценок пока нет
- 2nd HR Conclave BrochureДокумент4 страницы2nd HR Conclave BrochurePrateek JainОценок пока нет
- 9tinkering With TechnologyДокумент26 страниц9tinkering With TechnologyJonásFradestОценок пока нет
- Financial Deepening Challenge Fund Strategic Project ReviewДокумент58 страницFinancial Deepening Challenge Fund Strategic Project ReviewArini Putri Sari IIОценок пока нет
- E WoM and 2 0 Opinion Leaders PDFДокумент19 страницE WoM and 2 0 Opinion Leaders PDFChristine WongОценок пока нет
- Models Literature ReviewДокумент8 страницModels Literature Reviewc5t6h1q5100% (1)
- Managing Change and Innovation: Stephen P. Robbins Mary CoulterДокумент31 страницаManaging Change and Innovation: Stephen P. Robbins Mary CoulterRatul HasanОценок пока нет
- Concept of Entrepreneur: UNIT 1: An Overview of EntrepreneurshipДокумент15 страницConcept of Entrepreneur: UNIT 1: An Overview of Entrepreneurshipnotes.mcpuОценок пока нет
- Metal Detection Brochure PDFДокумент8 страницMetal Detection Brochure PDFaziz youssfiОценок пока нет
- MKTG3501 - Lecture 3 - Market Potential - 2017 v2Документ48 страницMKTG3501 - Lecture 3 - Market Potential - 2017 v2Mid-age ManОценок пока нет
- 1067-Article Text-2846-1-10-20210307 - 2Документ8 страниц1067-Article Text-2846-1-10-20210307 - 2Muhammad RidwanОценок пока нет
- Ncitie 2020 Anchoring Script-23 May 2020Документ9 страницNcitie 2020 Anchoring Script-23 May 2020shaluОценок пока нет
- CommunicationДокумент9 страницCommunicationDziennik InternautówОценок пока нет
- New Culture of Work White PaperДокумент15 страницNew Culture of Work White PaperkosarajuОценок пока нет
- Y7 - Computing-Part1Документ11 страницY7 - Computing-Part1hunia abbassОценок пока нет
- CP1-7c Grupo SALAДокумент26 страницCP1-7c Grupo SALAcamilodomesaОценок пока нет
- Guide For Class Questions Week 2Документ2 страницыGuide For Class Questions Week 2CartieОценок пока нет
- Advanced Refractory TechnologyДокумент70 страницAdvanced Refractory TechnologyradinasrОценок пока нет
- Topic 1 Sources of Cultural, Social and Political Change InnovationДокумент3 страницыTopic 1 Sources of Cultural, Social and Political Change InnovationMarilyn Dizon100% (2)
- DirectoryДокумент12 страницDirectorykavenindiaОценок пока нет
- Index Improvement Plan4Документ29 страницIndex Improvement Plan4Fianne RamalesОценок пока нет
- 4ps Innovation Textbook PDFДокумент88 страниц4ps Innovation Textbook PDFDiane ChakanzahОценок пока нет
- Full Report December 2011: U.S. Manufacturing Competitiveness InitiativeДокумент0 страницFull Report December 2011: U.S. Manufacturing Competitiveness Initiativeapi-238443539Оценок пока нет
- OTISLINE QuestionsДокумент5 страницOTISLINE QuestionsArvind Gupta100% (1)
- Impact of Human Resource Management On Business Performance: A Review of LiteratureДокумент11 страницImpact of Human Resource Management On Business Performance: A Review of Literaturenabila haroonОценок пока нет
- UNIDO-GEF GCIP Awards Ceremony 2016Документ32 страницыUNIDO-GEF GCIP Awards Ceremony 2016Zikrea SaleahОценок пока нет
- Transformation of Education: Who and How: Ricard Ruiz de Querol, David CortésДокумент9 страницTransformation of Education: Who and How: Ricard Ruiz de Querol, David CortésruizdequerolОценок пока нет
- Aramex Annual ReportДокумент191 страницаAramex Annual ReportSalОценок пока нет
- NJ Privatization Task Force Final ReportДокумент61 страницаNJ Privatization Task Force Final ReportThe Jersey City IndependentОценок пока нет