Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- LMA Guide to London Market ProcessingДокумент65 страницLMA Guide to London Market ProcessingNanthawat Babybeb100% (1)
- Man Dds Soft PDFДокумент460 страницMan Dds Soft PDFAl ZanoagaОценок пока нет
- 2-Eagan Model of CounsellingДокумент23 страницы2-Eagan Model of CounsellingVijesh V Kumar100% (4)
- Boston Qualitative Scoring System for Rey-Osterrieth Complex Figure Effective for Detecting Cognitive Impairment in Parkinson's DiseaseДокумент9 страницBoston Qualitative Scoring System for Rey-Osterrieth Complex Figure Effective for Detecting Cognitive Impairment in Parkinson's DiseaseJuanОценок пока нет
- 8 DaysДокумент337 страниц8 Daysprakab100% (1)
- Automate Changing World with Delta VFD-EL SeriesДокумент12 страницAutomate Changing World with Delta VFD-EL SeriesAl ZanoagaОценок пока нет
- Modicon EmulatorДокумент70 страницModicon EmulatorAl ZanoagaОценок пока нет
- WinDNC V06 02 NewFeatures enДокумент2 страницыWinDNC V06 02 NewFeatures enJoySalinas100% (3)
- Sensorless Vector Control Micro Drive: Vfd-El User Manual SeriesДокумент181 страницаSensorless Vector Control Micro Drive: Vfd-El User Manual SeriesEric G. VlzОценок пока нет
- Modicon - M221 - Eng CATALOG 2015Документ35 страницModicon - M221 - Eng CATALOG 2015Al ZanoagaОценок пока нет
- Zelio Control Monitoring 2018Документ69 страницZelio Control Monitoring 2018Al ZanoagaОценок пока нет
- Man 8055 Inst PDFДокумент732 страницыMan 8055 Inst PDFAl ZanoagaОценок пока нет
- Sensorless Vector Control Micro Drive: Vfd-El User Manual SeriesДокумент181 страницаSensorless Vector Control Micro Drive: Vfd-El User Manual SeriesEric G. VlzОценок пока нет
- Electromagneti SolenoidДокумент2 страницыElectromagneti SolenoidAl Zanoaga0% (1)
- Easypact MCCB CatalogueДокумент92 страницыEasypact MCCB CatalogueMuneer YousofОценок пока нет
- m221 System GuideДокумент190 страницm221 System GuideAl ZanoagaОценок пока нет
- Fan Uc Manuals 1787Документ194 страницыFan Uc Manuals 1787Somchai Sompongpuang100% (1)
- Easypact MCCB CatalogueДокумент92 страницыEasypact MCCB CatalogueMuneer YousofОценок пока нет
- Let's Connect.: Tools Catalogue 2014/2015Документ216 страницLet's Connect.: Tools Catalogue 2014/2015Al ZanoagaОценок пока нет
- Somachine Operating GuideДокумент246 страницSomachine Operating GuideAl ZanoagaОценок пока нет
- Modicon-M221 Hardware GuideДокумент352 страницыModicon-M221 Hardware GuideAl ZanoagaОценок пока нет
- TM3 HardwereДокумент192 страницыTM3 HardwereAl ZanoagaОценок пока нет
- Tm3 So Machine Progr GuideДокумент102 страницыTm3 So Machine Progr GuideAl ZanoagaОценок пока нет
- Modicon - M221 - Eng CATALOG 2015Документ35 страницModicon - M221 - Eng CATALOG 2015Al ZanoagaОценок пока нет
- So Machine Basic Func LibraryДокумент282 страницыSo Machine Basic Func LibraryAl ZanoagaОценок пока нет
- Tm3 Transm Receiver GuideДокумент66 страницTm3 Transm Receiver GuideAl ZanoagaОценок пока нет
- Machine SturxtureДокумент12 страницMachine SturxtureAl ZanoagaОценок пока нет
- Vyog-8g9t88 R1 enДокумент3 страницыVyog-8g9t88 R1 enYusofОценок пока нет
- Apc Smart Ups RTДокумент8 страницApc Smart Ups RTjose2525Оценок пока нет
- Convertizor VFD eДокумент427 страницConvertizor VFD eAl ZanoagaОценок пока нет
- Allen-Bradley PowerFlex 4 User Manual - enДокумент108 страницAllen-Bradley PowerFlex 4 User Manual - enMax3523Оценок пока нет
- Drive and Control Technology with CL150 PLC ProgrammingДокумент68 страницDrive and Control Technology with CL150 PLC ProgrammingClóvisReschkeОценок пока нет
- 20p td001 - en PДокумент82 страницы20p td001 - en PViridianaОценок пока нет
- Co2 d30 Laser MarkerДокумент8 страницCo2 d30 Laser MarkerIksan MustofaОценок пока нет
- Manzano's and Kendall Taxonomy of Cognitive ProcessesДокумент5 страницManzano's and Kendall Taxonomy of Cognitive ProcessesSheena BarulanОценок пока нет
- حقيبة تعليمية لمادة التحليلات الهندسية والعدديةДокумент28 страницحقيبة تعليمية لمادة التحليلات الهندسية والعدديةAnjam RasulОценок пока нет
- Signal Processing Problems Chapter 12Документ20 страницSignal Processing Problems Chapter 12CОценок пока нет
- Excellence Range DatasheetДокумент2 страницыExcellence Range DatasheetMohamedYaser100% (1)
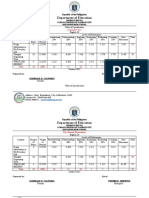
- Table of Specification ENGLISHДокумент2 страницыTable of Specification ENGLISHDonn Abel Aguilar IsturisОценок пока нет
- Menggambar Dengan Mode GrafikДокумент30 страницMenggambar Dengan Mode GrafikkurniawanОценок пока нет
- Growing Up Psychic by Chip Coffey - ExcerptДокумент48 страницGrowing Up Psychic by Chip Coffey - ExcerptCrown Publishing Group100% (1)
- Mosek UserguideДокумент81 страницаMosek UserguideadethroОценок пока нет
- Solar PV Array Modelling PDFДокумент13 страницSolar PV Array Modelling PDFsunilkumarece100% (1)
- Finance Process Optimization - Mapping The Journey To High PerformanceДокумент3 страницыFinance Process Optimization - Mapping The Journey To High PerformanceStephen G. LynchОценок пока нет
- Real Estate Regulatory Act (RERA) User ManualДокумент29 страницReal Estate Regulatory Act (RERA) User ManualprasadzinjurdeОценок пока нет
- RBI and Maintenance For RCC Structure SeminarДокумент4 страницыRBI and Maintenance For RCC Structure SeminarcoxshulerОценок пока нет
- Platon Si Academia Veche de ZellerДокумент680 страницPlaton Si Academia Veche de ZellerDan BrizaОценок пока нет
- Philippine Development Plan (Optimized)Документ413 страницPhilippine Development Plan (Optimized)herbertjohn24Оценок пока нет
- Carnot CycleДокумент3 страницыCarnot CyclealexontingОценок пока нет
- Comparing Social Studies Lesson PlansДокумент6 страницComparing Social Studies Lesson PlansArielle Grace Yalung100% (1)
- Malla Reddy Engineering College (Autonomous)Документ17 страницMalla Reddy Engineering College (Autonomous)Ranjith KumarОценок пока нет
- Shailesh Sharma HoroscopeДокумент46 страницShailesh Sharma Horoscopeapi-3818255Оценок пока нет
- Mri 7 TeslaДокумент12 страницMri 7 TeslaJEAN FELLIPE BARROSОценок пока нет
- S32 Design Studio 3.1: NXP SemiconductorsДокумент9 страницS32 Design Studio 3.1: NXP SemiconductorsThành Chu BáОценок пока нет
- Justice, Governance, CosmopolitanismДокумент152 страницыJustice, Governance, CosmopolitanismIban MiusikОценок пока нет
- Pedestrian Safety in Road TrafficДокумент9 страницPedestrian Safety in Road TrafficMaxamed YusufОценок пока нет
- A Personality Trait-Based Interactionist Model of Job PerformanceДокумент18 страницA Personality Trait-Based Interactionist Model of Job PerformanceAlvina AhmedОценок пока нет
- Roadmap For SSC CGLДокумент11 страницRoadmap For SSC CGLibt seoОценок пока нет
- 0418 w08 QP 1Документ17 страниц0418 w08 QP 1pmvarshaОценок пока нет