Вам также может понравиться
- JESR201904V25S01A0002Документ7 страницJESR201904V25S01A0002alin.butunoi865Оценок пока нет
- Life and Death CodeДокумент5 страницLife and Death Codealin.butunoi865Оценок пока нет
- Teorii OrganizationaleДокумент73 страницыTeorii Organizationaleliuduta1990Оценок пока нет
- Surse Suplimentare BibliografieДокумент2 страницыSurse Suplimentare Bibliografiealin.butunoi865Оценок пока нет
- Guidelines For Authors - IJMMTДокумент4 страницыGuidelines For Authors - IJMMTalin.butunoi865Оценок пока нет
- About NanoLUBДокумент3 страницыAbout NanoLUBalin.butunoi865Оценок пока нет
- KWGDL KWGDLS AgdlДокумент8 страницKWGDL KWGDLS Agdlalin.butunoi865Оценок пока нет
- Linear Guideway (E)Документ198 страницLinear Guideway (E)alin.butunoi865Оценок пока нет
- ABB IRB 2400 SpecificatiiДокумент2 страницыABB IRB 2400 Specificatiialin.butunoi865Оценок пока нет
- SVAN 956 User ManualДокумент195 страницSVAN 956 User Manualalin.butunoi865Оценок пока нет
- Polynomial Curve Fitting in MatlabДокумент3 страницыPolynomial Curve Fitting in MatlabKhan Arshid IqbalОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cheklist For The A380Документ4 страницыCheklist For The A380Te ÉNОценок пока нет
- CIVIMEC Elevators & Escalators LectureДокумент46 страницCIVIMEC Elevators & Escalators LectureTroy DanielsОценок пока нет
- DAF XF Brochure MY2020 HQ GB PDFДокумент15 страницDAF XF Brochure MY2020 HQ GB PDFpurnimaОценок пока нет
- 1948 - 1953 Dodge Truck VINДокумент5 страниц1948 - 1953 Dodge Truck VINjosh thomassonОценок пока нет
- Troubleshooting: Problem Symptoms TableДокумент1 страницаTroubleshooting: Problem Symptoms TablejuanОценок пока нет
- Glastron Boats User ManualДокумент110 страницGlastron Boats User ManualDaniel BulgaruОценок пока нет
- The 1200 Most Commonly Repeated Words in IELTS Listening TestДокумент16 страницThe 1200 Most Commonly Repeated Words in IELTS Listening TestLê Tố Linh PhạmОценок пока нет
- Bomb Calorimeter TheoryДокумент2 страницыBomb Calorimeter TheoryTub Pitthayuth33% (3)
- List of AutomobileДокумент55 страницList of Automobilesodhiseema83% (6)
- Valetcare: Exclusive Bene Ts For You, Our Valued CustomerДокумент2 страницыValetcare: Exclusive Bene Ts For You, Our Valued CustomerSiva KrishnaОценок пока нет
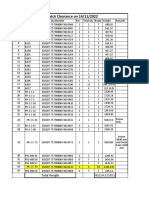
- Blasting List As On 20.02.23Документ97 страницBlasting List As On 20.02.23ISGECFAB YARD2Оценок пока нет
- Nokian Heavy Tyres Technical Manual / Agricultural Tyres 4.0.1Документ60 страницNokian Heavy Tyres Technical Manual / Agricultural Tyres 4.0.1davidОценок пока нет
- Distributor Price Details (1672312436.309) Isq 140Документ8 страницDistributor Price Details (1672312436.309) Isq 140Rohit ShrivastavaОценок пока нет
- Specifications For Crawler Dozers: Manufacturer Model Horsepower Standard CapacityДокумент48 страницSpecifications For Crawler Dozers: Manufacturer Model Horsepower Standard CapacityMongga ChipietОценок пока нет
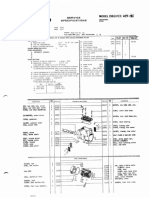
- NISSAN DIESEL Servise Manual Engine FE6 FE6T FE6TA Fe6ta-1Документ1 650 страницNISSAN DIESEL Servise Manual Engine FE6 FE6T FE6TA Fe6ta-1Marvin White22% (9)
- DBGVCC429 4CДокумент2 страницыDBGVCC429 4COFFICE DANACОценок пока нет
- PWTS Manual English FanatecДокумент33 страницыPWTS Manual English FanatecAllu AhoОценок пока нет
- Hydraulic Crawler Crane: Model: BMS1000Документ20 страницHydraulic Crawler Crane: Model: BMS1000Mohan CharanchathОценок пока нет
- Report 576Документ15 страницReport 576khizarОценок пока нет
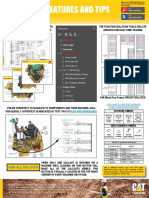
- Cat - Dcs.sis - Controller (7) - 093636Документ34 страницыCat - Dcs.sis - Controller (7) - 093636Jorge Efrain Paredes Barrios100% (1)
- TOYO I JSA 015 Abrasive BlastingДокумент2 страницыTOYO I JSA 015 Abrasive BlastingAnil SinghОценок пока нет
- Engine Part BooksДокумент219 страницEngine Part BooksRini Anto100% (1)
- 6.0L EngineДокумент809 страниц6.0L EngineLicorn BlancheОценок пока нет
- Project Report On Tata MotorsДокумент76 страницProject Report On Tata Motorsaryan singh100% (2)
- Helicopter Maintenance Magazine Apr-May 2023Документ32 страницыHelicopter Maintenance Magazine Apr-May 2023Jose A. HerreraОценок пока нет
- Malcolm McLean - The EconomistДокумент3 страницыMalcolm McLean - The EconomistkipumОценок пока нет
- Catalogue PDFДокумент401 страницаCatalogue PDFZeeshan AhmadОценок пока нет
- Me6503 Dme Mech VST Au Unit IIДокумент37 страницMe6503 Dme Mech VST Au Unit IISiva Raman100% (2)
- Vehicle Recovery - FM 20-22Документ139 страницVehicle Recovery - FM 20-22junglemist100% (2)
- Case Study Harley DavidsonДокумент2 страницыCase Study Harley DavidsonPhantom 69Оценок пока нет