Академический Документы
Профессиональный Документы
Культура Документы
Indice - Fundamentos de Robótica y Mecatrónica Con MATLAB y Simulink
Загружено:
Rafael AraujoАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Indice - Fundamentos de Robótica y Mecatrónica Con MATLAB y Simulink
Загружено:
Rafael AraujoАвторское право:
Доступные форматы
NDICE
PRLOGO ......................................................................................................................... 17
PREFACIO ........................................................................................................................ 21
CAPTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS .......................................... 27
1.1 ORGANIZACIN DE UN SISTEMA ROBTICO ................................................. 29
1.2 ENTORNOS MATLAB Y SIMULINK ................................................................ 31
1.3 TENDENCIAS EN ROBTICA Y MECATRNICA ............................................. 32
1.4 RESUMEN DEL CAPTULO ................................................................................... 34
CAPTULO 2. MODELADO DEL ENTORNO OPERATIVO .................................... 35
2.1 POSICIN Y ORIENTACIN DE CUERPO RGIDO ............................................ 36
2.1.1 Movimiento rgido ............................................................................................. 36
2.1.2 Notacin ............................................................................................................. 37
2.1.3 Posicin y orientacin de un cuerpo rgido ........................................................ 38
2.2 VECTOR DE TRASLACIN ................................................................................... 39
2.3 MATRIZ DE ROTACIN ........................................................................................ 40
2.3.1 Mtodo simple para calcular la matriz de rotacin ............................................ 42
2.3.2 Matriz de rotacin: una definicin formal.......................................................... 45
2.3.3 Matriz de rotacin para cualquier ngulo ........................................................... 47
2.3.4 Matriz de rotacin en Matlab ........................................................................... 51
2.4 LA TRANSFORMADA HOMOGNEA.................................................................. 53
2.4.1 Transformaciones entre ejes coordenados.......................................................... 54
2.4.2 Transformacin de un punto entre diferentes sistemas coordenados ................. 56
2.4.3 Transformacin homognea en Matlab ............................................................ 57
8 FUNDAMENTOS DE ROBTICA Y MECATRNICA CON MATLAB Y SIMULINK
RA-MA
2.4.4 Transformacin de puntos en Matlab ............................................................... 61
2.5 COMPOSICIN ENTRE MATRICES HOMOGNEAS......................................... 66
2.5.1 Composicin de matrices HT en Matlab .......................................................... 69
2.5.2 Modelado del espacio de trabajo de un robot ..................................................... 70
2.6 DESCRIPCIN DE CUERPO RGIDO .................................................................... 72
2.6.1 Un ejemplo a partir de una matriz HT ............................................................... 73
2.7 TRANSFORMACIONES DE SIMILITUD .............................................................. 74
2.7.1 Aplicacin de la transformada de similitud........................................................ 75
2.8 OPERADORES DE ROTACIN ............................................................................. 76
2.8.1 ngulos de Euler................................................................................................ 78
2.8.2 Clculo de los ngulos de Euler en Matlab ...................................................... 81
2.8.3 ngulos roll-pitch-yaw ...................................................................................... 82
2.8.4 Clculo de los ngulos RPY en Matlab............................................................ 86
2.8.5 Rotacin de un ngulo sobre un eje (angle-axis) ............................................... 88
2.8.6 Cuaternin unitario ............................................................................................ 90
2.8.7 Clculo de cuaterniones unitarios en Matlab ................................................... 92
2.9 OTROS DESCRIPTORES DE POSICIN Y ORIENTACIN EN EL ESPACIO .. 99
2.9.1 Coordenadas cilndricas ..................................................................................... 99
2.9.2 Coordenadas esfricas ...................................................................................... 102
2.10 RESUMEN DEL CAPTULO ............................................................................... 103
2.11 EJERCICIOS RECOMENDADOS ....................................................................... 104
2.12 BIBLIOGRAFA RECOMENDADA ................................................................... 109
CAPTULO 3. CINEMTICA DE SISTEMAS ROBTICOS Y
MECATRNICOS .......................................................................................................... 111
3.1 GRADOS DE LIBERTAD ...................................................................................... 112
3.2 CUERPO RGIDO: EXPANDIENDO SU DEFINICIN ....................................... 115
3.3 TIPOS DE ARTICULACIONES............................................................................. 116
3.4 CADENA CINEMTICA ....................................................................................... 119
3.5 CINEMTICA DIRECTA ...................................................................................... 119
3.5.1 Coordenadas generalizadas .............................................................................. 121
3.5.2 Convencin Denavit-Hartenberg (DH) ............................................................ 123
3.5.3 Convencin Denavit-Hartenberg: una definicin formal ................................. 128
3.5.4 Robot 3R: ejemplo de la convencin DH, paso a paso .................................... 130
3.5.5 La tabla de parmetros DH .............................................................................. 131
3.5.6 Clculo de la cinemtica directa a partir de la tabla DH .................................. 133
3.5.7 Convencin DH en Matlab ............................................................................ 136
3.5.8 Construccin de un sistema robtico en Matlab ............................................ 138
RA-MA
NDICE 9
3.5.9 Grfica de un sistema robtico en Matlab ...................................................... 140
3.5.10 Clculo de la cinemtica directa en Matlab.................................................. 142
3.5.11 Modificacin de cinemtica directa en Matlab ............................................ 143
3.6 EJEMPLOS DEL CLCULO DE LA CINEMTICA DIRECTA PARA
DIFERENTES ROBOTS ......................................................................................... 144
3.6.1 Robot cilndrico ............................................................................................... 144
3.6.2 Robot antropomrfico ...................................................................................... 150
3.6.3 Eslabn esfrico ............................................................................................... 155
3.6.4 Robot TQ MA2000 .......................................................................................... 160
3.6.5 Robot manipulador Stanford ............................................................................ 173
3.6.6 Robot manipulador SCARA ............................................................................ 179
3.6.7 Robot humanoide Dany Walker ....................................................................... 184
3.7 RESUMEN DEL CAPTULO ................................................................................. 192
3.8 EJERCICIOS RECOMENDADOS ......................................................................... 193
3.9 LECTURAS RECOMENDADAS........................................................................... 197
CAPTULO 4. CINEMTICA INVERSA .................................................................... 199
4.1 EL PROBLEMA DE LA CINEMTICA INVERSA .............................................. 200
4.1.1 Solucin al problema de cinemtica inversa .................................................... 202
4.1.2 Mtodo geomtrico .......................................................................................... 203
4.1.3 Distancias de ajuste .......................................................................................... 207
4.1.4 Desacoplamiento cinemtico ........................................................................... 211
4.1.5 Solucin para el robot antropomrfico de 6-DOF............................................ 216
4.1.6 Solucin del robot SCARA .............................................................................. 217
4.1.7 Solucin del robot SCARA en Matlab ........................................................... 220
4.2 MTODOS ANALTICOS E ITERATIVOS .......................................................... 225
4.3 SOLUCIN ITERATIVA DEL PROBLEMA DE CINEMTICA INVERSA ...... 226
4.3.1 Convergencia de la solucin iterativa .............................................................. 228
4.3.2 Clculo de la cinemtica inversa en Matlab ................................................... 231
4.4 RESUMEN DEL CAPTULO ................................................................................. 237
4.5 EJERCICIOS PROPUESTOS ................................................................................. 237
4.6 BIBLIOGRAFA RECOMENDADA ..................................................................... 239
CAPTULO 5. CINEMTICA DIFERENCIAL .......................................................... 241
5.1 VELOCIDAD LINEAL Y ROTACIONAL ............................................................ 242
5.1.1 Velocidad lineal ............................................................................................... 243
5.1.2 Velocidad rotacional ........................................................................................ 245
5.2 EL VECTOR DE VELOCIDAD ............................................................................. 247
10 FUNDAMENTOS DE ROBTICA Y MECATRNICA CON MATLAB Y SIMULINK
RA-MA
5.2.1 Simulacin del vector de velocidad en Matlab .............................................. 247
5.2.2 Movimiento libre en Matlab........................................................................... 251
5.3 DERIVADA DE UNA MATRIZ DE ROTACIN ................................................. 255
5.3.1 Matriz antisimtrica (skew symmetric matrix) ............................................ 256
5.3.2 De regreso a la derivada de la matriz de rotacin ............................................ 257
5.4 LA MATRIZ DE VELOCIDAD.............................................................................. 259
5.4.1 Matriz de velocidad aumentada ....................................................................... 259
5.4.2 Velocidad lineal en un punto definido con respecto al eje coordenado en
movimiento ..................................................................................................... 260
5.5 PROPIEDADES DE LA MATRIZ DE VELOCIDAD ............................................ 262
5.5.1 Transformacin entre la matriz S y el vector de velocidad .......................... 262
5.5.2 Transformacin de similitud de la matriz S ..................................................... 263
5.6 MATRIZ DE VELOCIDAD EN MATLAB .......................................................... 264
5.7 VECTOR DE VELOCIDAD EN MATLAB ......................................................... 266
5.7.1 Velocidad lineal ............................................................................................... 266
5.7.2 Velocidad rotacional ........................................................................................ 267
5.7.3 Generacin del vector de velocidad en el cdigo ............................................. 268
5.8 HACIA LA MATRIZ JACOBIANA ....................................................................... 272
5.8.1 Transformacin de la velocidad angular .......................................................... 272
5.8.2 Transformacin del vector de velocidad (w).................................................... 274
5.8.3 Transformacin del vector w en Matlab ......................................................... 277
5.9 LA MATRIZ JACOBIANA CLSICA................................................................... 279
5.10 LA MATRIZ JACOBIANA .................................................................................. 283
5.11 CLCULO DE LA MATRIZ JACOBIANA ......................................................... 285
5.11.1 Aportacin de una articulacin rotacional ..................................................... 285
5.11.2 Aportacin de una articulacin prismtica ..................................................... 288
5.11.3 Formulario de clculos para la matriz Jacobiana ........................................... 289
5.12 EJEMPLOS DEL CLCULO DE LA MATRIZ JACOBIANA ............................ 290
5.12.1 Robot de dos grados de libertad ..................................................................... 290
5.12.2 Robot SCARA ............................................................................................... 292
5.13 LA MATRIZ JACOBIANA EN MATLAB ......................................................... 294
5.13.1 Clculo computacional de la matriz Jacobiana .............................................. 294
5.13.2 Articulacin rotacional................................................................................... 296
5.13.3 Articulacin prismtica .................................................................................. 297
5.13.4 Clculo de la matriz Jacobiana en Matlab .................................................... 299
5.13.5 Algoritmo computacional en el cdigo .......................................................... 301
5.14 REDUNDANCIA .................................................................................................. 303
RA-MA
NDICE 11
5.15 ANLISIS DE SINGULARIDAD ........................................................................ 304
5.15.1 Articulacin esfrica ...................................................................................... 306
5.15.2 Robot antropomrfico .................................................................................... 307
5.16 MANIPULABILIDAD .......................................................................................... 309
5.16.1 ndice de manipulabilidad en Matlab ........................................................... 311
5.17 LA MATRIZ JACOBIANA ANALTICA ............................................................ 313
5.18 BIBLIOGRAFA RECOMENDADA ................................................................... 315
5.19 EJERCICIOS PROPUESTOS ............................................................................... 315
CAPTULO 6. DINMICA DE SISTEMAS ROBTICOS Y
MECATRNICOS .......................................................................................................... 319
6.1 MTODOS PARA EL ANLISIS DEL MOVIMIENTO....................................... 321
6.2 ANLISIS DINMICO DE EULER-LAGRANGE ............................................... 322
6.2.1 Energa cintica y potencial: definiciones bsicas ........................................... 323
6.2.2 Coordenadas generalizadas .............................................................................. 323
6.2.3 Ecuacin de Euler-Lagrange ............................................................................ 324
6.2.4 Demostracin de la ecuacin de Euler-Lagrange ............................................. 324
6.3 DERIVACIN DE ECUACIONES DE MOVIMIENTO DESDE LA
EXPRESIN DE EULER-LAGRANGE ................................................................ 327
6.3.1 Energa cintica ................................................................................................ 327
6.3.2 El momento de inercia Ii .................................................................................. 328
6.3.3 El tensor de inercia I ........................................................................................ 330
6.3.4 Teorema de los ejes paralelos .......................................................................... 332
6.3.5 Clculo del momento de inercia para un eslabn rectangular .......................... 333
6.3.6 Clculo de I para eslabones cilndricos ............................................................ 334
6.3.7 Conversin del momento de inercia ................................................................. 335
6.3.8 Expresin general de la energa cintica .......................................................... 337
6.3.9 Clculo de la matriz de inercia en Matlab ...................................................... 338
6.3.10 Energa potencial ........................................................................................... 339
6.3.11 Clculo de fuerza o torque derivados de la energa potencial en Matlab ..... 340
6.4 CONSTRUCCIN DE LA ECUACIN DE MOVIMIENTO DE EULERLAGRANGE ........................................................................................................... 343
6.4.1 Ecuacin general de movimiento de Euler-Lagrange ...................................... 347
6.5 ECUACIONES EULER-LAGRANGE: MTODO DE ASADA-SPONG ............. 349
6.5.1 Un ejemplo ilustrativo: robot planar de dos grados de libertad........................ 350
6.5.2 Ecuacin de movimiento del robot planar de dos grados de libertad ............... 358
6.6 ANLISIS DE LA ECUACIN DE MOVIMIENTO EULER-LAGRANGE ........ 358
6.6.1 Efectos derivados de la inercia......................................................................... 358
12 FUNDAMENTOS DE ROBTICA Y MECATRNICA CON MATLAB Y SIMULINK
RA-MA
6.6.2 Efectos de la aceleracin .................................................................................. 360
6.6.3 Expresiones para el efecto de fuerzas centrfugas y de Coriolis ...................... 361
6.6.4 Efecto de las fuerzas centrfugas en el robot planar de dos grados de
libertad ............................................................................................................. 364
6.6.5 Efectos de las fuerzas de Coriolis sobre el robot planar de dos grados de
libertad ............................................................................................................. 366
6.7 SIMULACIN DEL ROBOT PLANAR DE DOS GRADOS DE LIBERTAD
EN MATLAB ........................................................................................................ 369
6.7.1 Simulacin del sistema planar de dos grados de libertad con torques nulos .... 373
6.8 COMENTARIOS FINALES SOBRE EL MTODO ASADA-SPONG ................. 375
6.9 DETERMINACIN DE LA ECUACIN DE MOVIMIENTO: MTODO DE
UICKER-PAUL....................................................................................................... 376
6.9.1 Determinacin de la energa cintica ............................................................... 376
6.9.2 Determinacin de la energa potencial ............................................................. 383
6.9.3 La ecuacin de movimiento: mtodo de Uicker-Paul ...................................... 384
6.9.4 Construccin de la ecuacin de movimiento: mtodo de Uicker-Paul............. 387
6.9.5 Expresin matricial de las ecuaciones de movimiento ..................................... 389
6.9.6 Ejemplo de la determinacin del modelo dinmico: mtodo de Uicker-Paul
aplicado al robot Puma 560 ........................................................................... 390
6.10 LECTURAS RECOMENDADAS......................................................................... 393
6.11 EJERCICIOS RECOMENDADOS ....................................................................... 394
CAPTULO 7. MODELO DINMICO DE NEWTON-EULER ................................ 397
7.1 CONCEPTOS FUNDAMENTALES ...................................................................... 398
7.1.1 Construccin del diagrama de cuerpo libre ...................................................... 399
7.1.2 Trmino giroscpico ........................................................................................ 401
7.1.3 Planteamiento base del mtodo de Newton-Euler............................................ 403
7.1.4 Movimiento relativo entre sistemas coordenados ............................................ 403
7.1.5 Bases cinemticas en el planteamiento Newton-Euler ..................................... 413
7.2 PLANTEAMIENTO CENTRAL NEWTON-EULER ............................................ 421
7.2.1 Expresiones de fuerza y torque para el centro de masa .................................... 421
7.2.2 Redefinicin de los vectores en un eslabn ..................................................... 422
7.2.3 Fuerzas y torque total sobre el centro de masa................................................. 425
7.3 ENSAMBLADO DEL MTODO NEWTON-EULER ........................................... 427
7.3.1 Descripcin del mtodo: paso a paso ............................................................... 428
7.3.2 Mtodo NE: una simplificacin en la implementacin recursiva .................... 429
7.4 MTODO NE: COMPONENTES........................................................................... 431
7.5 IMPLEMENTACIN RECURSIVA DEL MTODO............................................ 432
RA-MA
NDICE 13
7.5.1 Recursin hacia adelante .................................................................................. 433
7.5.2 Recursin hacia atrs ....................................................................................... 434
7.5.3 Comentarios finales del mtodo recursivo ....................................................... 435
7.6 EL MTODO NEWTON-EULER EN MATLAB................................................. 436
7.6.1 Implementacin del mtodo NE recursivo ....................................................... 437
7.6.2 Clculo de la matriz de inercia en Matlab ...................................................... 439
7.6.3 Clculo del torque inercial en Matlab ............................................................ 442
7.6.4 Torque de efectos centrfugos y Coriolis en Matlab ........................................ 445
7.7 SIMULACIN DE LOS EFECTOS DE FRICCIN .............................................. 449
7.8 DINMICA DIRECTA VS. INVERSA .................................................................. 452
7.9 DINMICA DIRECTA EN MATLAB ................................................................. 453
7.9.1 Dinmica directa: mtodo de Walker y Orin ................................................... 454
7.9.2 Construccin en Matlab ................................................................................. 455
7.9.3 Un ejemplo de dinmica directa en Matlab .................................................... 458
7.9.4 Otro comando de dinmica directa en Matlab................................................ 459
7.10 BIBLIOGRAFA RECOMENDADA ................................................................... 461
7.11 EJERCICIOS RECOMENDADOS ....................................................................... 462
CAPTULO 8. PLANEACIN DE TRAYECTORIAS ............................................... 465
8.1 DEFINICIN DE ESPACIOS EN LA PLANIFICACIN ..................................... 466
8.2 CONCEPTOS BSICOS DE TRAYECTORIAS ................................................... 467
8.3 PROPIEDADES EN EL DISEO DE TRAYECTORIAS ...................................... 469
8.4 DISEO DE TRAYECTORIAS CON POLINOMIOS ........................................... 470
8.4.1 Polinomios de tercer grado .............................................................................. 471
8.4.2 Trayectorias de tercer grado en Matlab .......................................................... 473
8.4.3 Generalizacin de la solucin para t0 ............................................................ 478
8.4.4 Polinomios de quinto grado ............................................................................. 481
8.4.5 Trayectorias de quinto grado en Matlab ......................................................... 485
8.5 TRAYECTORIAS EN EL ESPACIO CARTESIANO ............................................ 489
8.5.1 Trayectorias Cartesianas en Matlab ............................................................... 490
8.5.2 Interpolador de trayectorias en Matlab........................................................... 494
8.6 TRAYECTORIAS E INTERPOLACIN DE HERMITE ...................................... 495
8.6.1 Interpolacin hermitiana cbica ....................................................................... 497
8.7 RESUMEN DEL CAPTULO ................................................................................. 502
8.8 BIBLIOGRAFA RECOMENDADA ..................................................................... 502
8.9 EJERCICIOS RECOMENDADOS ......................................................................... 503
14 FUNDAMENTOS DE ROBTICA Y MECATRNICA CON MATLAB Y SIMULINK
RA-MA
CAPTULO 9. CONTROL DE SISTEMAS ROBTICOS Y
MECATRNICOS .......................................................................................................... 507
9.1 SISTEMAS DE CONTROL .................................................................................... 508
9.1.1 Representacin por medio de bloques.............................................................. 508
9.1.2 Respuesta del bloque........................................................................................ 510
9.1.3 Funcin de transferencia .................................................................................. 513
9.1.4 Funcin de transferencia en Matlab ............................................................... 516
9.1.5 Funcin de transferencia de un sistema de control........................................... 518
9.1.6 Anlisis del sistema de control con retroalimentacin ..................................... 521
9.1.7 Funcin de lazo cerrado en Matlab ................................................................ 525
9.1.8 Respuesta dinmica de un sistema ................................................................... 527
9.1.9 Anlisis de polos y ceros .................................................................................. 528
9.1.10 Mapa de polos y ceros en Matlab ................................................................. 530
9.1.11 Orden del sistema dinmico ........................................................................... 531
9.1.12 Sistemas de primer orden ............................................................................... 532
9.1.13 Respuesta de primer orden en Matlab .......................................................... 534
9.1.14 Anlisis de la respuesta de primer orden ........................................................ 538
9.2 CONTROL PROPORCIONAL EN SIMULINK ................................................... 552
9.2.1 Efecto de un valor de ganancia ........................................................................ 553
9.2.2 Retroalimentacin del error ............................................................................. 555
9.2.3 Anlisis del control proporcional ..................................................................... 558
9.3 CONTROL PROPORCIONAL EN MATLAB ..................................................... 564
9.4 SISTEMAS DINMICOS DE SEGUNDO ORDEN .............................................. 566
9.4.1 Anlisis del comportamiento en sistemas de segundo orden ........................... 569
9.5 SISTEMAS DE SEGUNDO ORDEN EN SIMULINK ......................................... 573
9.5.1 Simulacin del sistema por medio de bloques de integracin .......................... 573
9.5.2 Simulacin del sistema por medio del bloque de funcin de transferencia ...... 576
9.6 SISTEMAS DE SEGUNDO ORDEN EN MATLAB ............................................ 576
9.7 SISTEMAS DINMICOS DE ORDEN-N .............................................................. 579
9.8 CONTROL PROPORCIONAL E INTEGRAL ....................................................... 580
9.8.1 Respuesta de un controlador PI de lazo cerrado............................................... 582
9.8.2 Definicin de las ganancias proporcional e integral ........................................ 583
9.8.3 Controlador PI en Simulink ........................................................................... 586
9.8.4 Diferentes ganancias PI en Simulink ............................................................. 589
9.8.5 Control PI en Matlab ...................................................................................... 591
9.9 CONTROL PROPORCIONAL DERIVATIVO ...................................................... 593
9.9.1 Respuesta de un controlador PD de lazo cerrado ............................................. 595
RA-MA
NDICE 15
9.9.2 Esquema P-D ................................................................................................... 596
9.10 CONTROL PID ..................................................................................................... 597
9.10.1 Control PID en Matlab ................................................................................. 598
9.10.2 Diseo de un controlador PID ........................................................................ 600
9.10.3 Gua de diseo para un controlador PID ........................................................ 603
9.10.4 Ejemplo de diseo de un control PID en Matlab.......................................... 604
9.10.5 Control PID estndar...................................................................................... 616
9.10.6 PID estndar en Matlab ................................................................................ 618
9.10.7 Controlador PID: otras sugerencias de diseo ............................................... 619
9.11 CONTROL PID DE TRAYECTORIAS ARTICULARES EN MATLAB .......... 620
9.12 CONTROL DE TORQUE CALCULADO ............................................................ 627
9.12.1 Diseo de torque calculado con un control PD .............................................. 631
9.12.2 Control de torque calculado con PD en Simulink ........................................ 633
9.13 CONTROL POR RETROALIMENTACIN DE ESTADOS ............................... 636
9.13.1 Introduccin a variable de estado ................................................................... 637
9.13.2 Diseo de control por retroalimentacin de estados ...................................... 647
9.13.3 Retroalimentacin de estados en Simulink .................................................. 661
9.14 RESUMEN DEL CAPTULO ............................................................................... 664
9.15 BIBLIOGRAFA RECOMENDADA ................................................................... 665
9.16 EJERCICIOS RECOMENDADOS ....................................................................... 666
BIBLIOGRAFA ............................................................................................................. 671
MATERIAL ADICIONAL ............................................................................................. 675
NDICE ALFABTICO ................................................................................................. 677
Вам также может понравиться
- HIROSHIMAДокумент6 страницHIROSHIMAmiguel garciaОценок пока нет
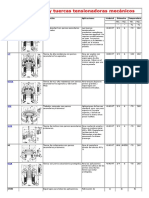
- Gama de Pernos y Tuercas TensionadorasДокумент5 страницGama de Pernos y Tuercas TensionadorasEduОценок пока нет
- Determinacion de La PorosidadДокумент12 страницDeterminacion de La PorosidadKarol RicoОценок пока нет
- INFORME 1 HidrometalurgiaДокумент33 страницыINFORME 1 HidrometalurgiaCristian Bianey Araque PradaОценок пока нет
- Destilacion AvanzadaДокумент11 страницDestilacion AvanzadaLucio David Ramírez García100% (1)
- Mapa MentalДокумент1 страницаMapa Mentalandres felipe sandoval porrasОценок пока нет
- Medidores de FlujoДокумент4 страницыMedidores de FlujoMarco Antonio Becerril HernandezОценок пока нет
- Sistema Electrónico de Encendido Con Regulación AntidetonanteДокумент7 страницSistema Electrónico de Encendido Con Regulación AntidetonanteMemo RosalesОценок пока нет
- HORMIGONДокумент22 страницыHORMIGONLenin Deyvis MelitonОценок пока нет
- Turbina de GasДокумент10 страницTurbina de GasLuis Fernando DavilaОценок пока нет
- Prueba 4Документ24 страницыPrueba 4Fernando OrdoñezОценок пока нет
- Tratador Térmico PDFДокумент0 страницTratador Térmico PDFJuanes CevallosОценок пока нет
- Pampa Blanca y OrcomaДокумент6 страницPampa Blanca y Orcoma3xt3rminioОценок пока нет
- Resumen y Análisis Del Capitulo 03Документ4 страницыResumen y Análisis Del Capitulo 03Jhoel CRОценок пока нет
- Apqd Apqd-326 FormatoalumnotrabajofinalДокумент9 страницApqd Apqd-326 Formatoalumnotrabajofinal0.0 luistmy 0.0Оценок пока нет
- Diferencias de Los Tipos de LuminariasДокумент14 страницDiferencias de Los Tipos de LuminariasLuisAndresBarahonaОценок пока нет
- Sistema de Refrigeración de WankelДокумент9 страницSistema de Refrigeración de WankelGA EynerОценок пока нет
- Plantilla de Estructura Del Informe Final de La Tesis de Titulo ProfesionalДокумент63 страницыPlantilla de Estructura Del Informe Final de La Tesis de Titulo ProfesionalPaul Henderson Laqui LoyolaОценок пока нет
- Biotecnologia Piña5Документ49 страницBiotecnologia Piña5juliecitoОценок пока нет
- IntroДокумент16 страницIntromileidisОценок пока нет
- Codigo de Fallas IsxДокумент46 страницCodigo de Fallas Isxomar76% (17)
- Cambio Climatico PiuraДокумент13 страницCambio Climatico PiuraClever Alexis Abad CorreaОценок пока нет
- 1 2 Ejercicios de Propiedades y Estatica de FluidosДокумент4 страницы1 2 Ejercicios de Propiedades y Estatica de FluidosJuan Vasquez Gutierrez100% (1)
- Clase 1 - Seguridad Ambiental y Del TrabajoДокумент13 страницClase 1 - Seguridad Ambiental y Del TrabajoMaxiОценок пока нет
- Importancia de La Instrumentacion - Tema IДокумент46 страницImportancia de La Instrumentacion - Tema IEdgar CastilloОценок пока нет
- Deduccion Del Pendulo FisicoДокумент2 страницыDeduccion Del Pendulo FisicoKevin RamirezОценок пока нет
- P4-5 LBMQ2Документ11 страницP4-5 LBMQ2DulceОценок пока нет
- Los Tributo en GuatemalaДокумент16 страницLos Tributo en GuatemalaAbbyMartОценок пока нет
- Central Termoelectrica VentanillaДокумент26 страницCentral Termoelectrica VentanillaJorgeJonathan100% (3)
- Amtd Amtd-408 MallaДокумент6 страницAmtd Amtd-408 MallaelioОценок пока нет