Вам также может понравиться
- PNABU386Документ224 страницыPNABU386Andrei HorhoianuОценок пока нет
- VPP 14 Executive SummaryДокумент14 страницVPP 14 Executive SummaryAndrei HorhoianuОценок пока нет
- EPRI MicroGridДокумент9 страницEPRI MicroGridAndrei HorhoianuОценок пока нет
- Seaward PAT Guide 2014Документ36 страницSeaward PAT Guide 2014Andrei Horhoianu100% (1)
- 17th Edition Testing GuideДокумент12 страниц17th Edition Testing GuideAndrei HorhoianuОценок пока нет
- How To Smart Home PDF orДокумент79 страницHow To Smart Home PDF orAndrei Horhoianu100% (1)
- Catalog SchneiderДокумент176 страницCatalog SchneiderAndrei HorhoianuОценок пока нет
- Cat ProteccioDif GB LRДокумент8 страницCat ProteccioDif GB LRAndrei HorhoianuОценок пока нет
- HTTP Eur-Lex - Europa.eu Legal-Content EN TXT PDF Uri CELEX 32014r0548&from ENДокумент15 страницHTTP Eur-Lex - Europa.eu Legal-Content EN TXT PDF Uri CELEX 32014r0548&from ENAndrei HorhoianuОценок пока нет
- New Concepts For Prevention of Ageing by Means of On-Line Degassing and Drying and Hermetically Sealing of Power TransformersДокумент8 страницNew Concepts For Prevention of Ageing by Means of On-Line Degassing and Drying and Hermetically Sealing of Power TransformersAndrei HorhoianuОценок пока нет
- Current-Limiting Curves: Installation GuideДокумент1 страницаCurrent-Limiting Curves: Installation GuideAndrei HorhoianuОценок пока нет
- Single-Line Diagrams: Stand-Alone Parallel To MainsДокумент1 страницаSingle-Line Diagrams: Stand-Alone Parallel To MainsAndrei HorhoianuОценок пока нет
- Explosion Proof MCB Distribution Board 12 Way: Tri-FlpДокумент1 страницаExplosion Proof MCB Distribution Board 12 Way: Tri-FlpAndrei HorhoianuОценок пока нет
- Walsall Hazardous Area, Flame & Explosion Proof Distribution BoardsДокумент13 страницWalsall Hazardous Area, Flame & Explosion Proof Distribution BoardsAndrei HorhoianuОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Garage Door Control W/keyfob DSC-007: Application NoteДокумент2 страницыGarage Door Control W/keyfob DSC-007: Application Noteoreste2008Оценок пока нет
- Westinghouse WGen7500DF Spec SheetДокумент2 страницыWestinghouse WGen7500DF Spec SheetgusmilexaОценок пока нет
- M. of St. Lighting Poles Installation & Related LCPДокумент18 страницM. of St. Lighting Poles Installation & Related LCPWaleed Salih100% (1)
- Day 2Документ12 страницDay 2anamika soodhОценок пока нет
- Swagger Annotations: OpenapiДокумент2 страницыSwagger Annotations: OpenapiSrinu SОценок пока нет
- FlucsPro Ver 6 - 0 Web Training Notes Rev1Документ32 страницыFlucsPro Ver 6 - 0 Web Training Notes Rev1dharshan balajiОценок пока нет
- Electronically Controlled Brake System (EBS)Документ18 страницElectronically Controlled Brake System (EBS)Sherzad Chem100% (4)
- Seminar Pill CameraДокумент25 страницSeminar Pill CameraadilppОценок пока нет
- Deutsche Bank - Cloud Computing. Clear Skies AheadДокумент20 страницDeutsche Bank - Cloud Computing. Clear Skies AheadkentselveОценок пока нет
- As 4607-1999 Personal Response SystemsДокумент8 страницAs 4607-1999 Personal Response SystemsSAI Global - APACОценок пока нет
- Global Cybersecurity Perspectives & Trends For 2024Документ48 страницGlobal Cybersecurity Perspectives & Trends For 2024Kobra CaktusОценок пока нет
- Process Models: Dr. Hameedur RahmanДокумент15 страницProcess Models: Dr. Hameedur RahmanOrhan rumiОценок пока нет
- MM SoftwareДокумент12 страницMM SoftwareRais RizalОценок пока нет
- STS Module 3Документ28 страницSTS Module 3Arlo GutayОценок пока нет
- Visvesvaraya Technological University Belagavi, Karnataka: Internship Report OnДокумент30 страницVisvesvaraya Technological University Belagavi, Karnataka: Internship Report OnAafaq Altaf100% (1)
- LED Lights Coding On Non LED Equipped Vehicles - OBDelevenДокумент18 страницLED Lights Coding On Non LED Equipped Vehicles - OBDelevenMarko ŠtambukОценок пока нет
- Topology of ComputersДокумент23 страницыTopology of ComputerssantoshguptaaОценок пока нет
- Strength Under Fire: Cat Fire Pump EnginesДокумент4 страницыStrength Under Fire: Cat Fire Pump EnginesArgenis JimenezОценок пока нет
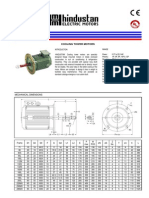
- Cooling Tower MotorДокумент2 страницыCooling Tower MotorDipendraTomarОценок пока нет
- AICE Milestone04 03.04.2024Документ15 страницAICE Milestone04 03.04.2024kevinkiprotichyegonОценок пока нет
- APO Overview v1Документ58 страницAPO Overview v1topankajОценок пока нет
- CHD Candidate Guidebook PDFДокумент20 страницCHD Candidate Guidebook PDFsyammc0% (1)
- AC 25.899-1 Electrical Bonding and Protection Against Static ElectricityДокумент11 страницAC 25.899-1 Electrical Bonding and Protection Against Static ElectricitysheyunfengОценок пока нет
- 1298Документ136 страниц1298Iker BasqueAdventureОценок пока нет
- Bhel Summer Training (Industrial Training) ReportДокумент35 страницBhel Summer Training (Industrial Training) ReportAmelia WarnerОценок пока нет
- DORNA EPS-B1 Servo User Manual V1.11 OcrДокумент191 страницаDORNA EPS-B1 Servo User Manual V1.11 Ocrnapo3tОценок пока нет
- Installing USBasp in Atmel Studio Ver 7Документ4 страницыInstalling USBasp in Atmel Studio Ver 7J Uriel CorderoОценок пока нет
- Banks Betting Big On Big Data and Real-Time Customer InsightДокумент5 страницBanks Betting Big On Big Data and Real-Time Customer InsightShahid_ONОценок пока нет
- Informe Practica II Lab de MedidasДокумент5 страницInforme Practica II Lab de MedidasMaria Isabel Martinez NorenaОценок пока нет
- Coolmay: MX2N Series PLC Programming ManualДокумент32 страницыCoolmay: MX2N Series PLC Programming ManualAbel G AbelОценок пока нет