Вам также может понравиться
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Документ6 страницGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpОценок пока нет
- Phase Current Control of A Two Phase Synchronous Reluctance MachineДокумент7 страницPhase Current Control of A Two Phase Synchronous Reluctance MachineapacheОценок пока нет
- IEEE PES 12plsdfa20mcmsamДокумент7 страницIEEE PES 12plsdfa20mcmsamParameswararao BillaОценок пока нет
- Visualization and Animation of Transformer, Electrical Machines and Electrical Drives Working PrinciplesДокумент4 страницыVisualization and Animation of Transformer, Electrical Machines and Electrical Drives Working PrinciplesSenad SmakaОценок пока нет
- Excitation of Isolated Three-Phase Induction Generator by A Single CapacitorДокумент7 страницExcitation of Isolated Three-Phase Induction Generator by A Single CapacitorEngrImranKhanОценок пока нет
- Pulse August 2014Документ16 страницPulse August 2014lets_share_sthОценок пока нет
- Dynamic Simulation of Brushless DC Motor DrivesДокумент7 страницDynamic Simulation of Brushless DC Motor DrivesMehmet KırgözoğluОценок пока нет
- Department University Lag-: NamicДокумент7 страницDepartment University Lag-: NamicSuhail ShahОценок пока нет
- Expt No 4Документ6 страницExpt No 4abheetpethe.scoe.entcОценок пока нет
- Modelling of Power Transformer FaultsДокумент7 страницModelling of Power Transformer FaultselizabethloayzaОценок пока нет
- Massachusetts Institute of TechnologyДокумент12 страницMassachusetts Institute of TechnologyPrakhar PandeyОценок пока нет
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelДокумент7 страницSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiОценок пока нет
- Induction Motor Design Using FEMMДокумент13 страницInduction Motor Design Using FEMMJunaid AhmadОценок пока нет
- Upec 2Документ7 страницUpec 2manjusingОценок пока нет
- Induction Motor Equivalent Circuit For Dynamic SimulationДокумент6 страницInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822Оценок пока нет
- Spice Models For Power ElectronicsДокумент13 страницSpice Models For Power ElectronicslaksologinОценок пока нет
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionДокумент6 страницTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806Оценок пока нет
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsДокумент6 страницA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviОценок пока нет
- 4 5909185511016106484Документ6 страниц4 5909185511016106484Hanan ShayiboОценок пока нет
- C 2003 James L. Kirtley JRДокумент18 страницC 2003 James L. Kirtley JRMadina KalmuhambetovaОценок пока нет
- P. C. Sen - Principles of Electric Machines 2edДокумент634 страницыP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFДокумент6 страницPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniОценок пока нет
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadДокумент8 страницPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyОценок пока нет
- Application of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965Документ6 страницApplication of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965new7677100% (1)
- Direct Torque ControlДокумент5 страницDirect Torque ControljanusanusОценок пока нет
- The Calculation of DC Fault Currents With Contributions From DC Machines and RectifiersДокумент10 страницThe Calculation of DC Fault Currents With Contributions From DC Machines and RectifiersMadhusudhan SrinivasanОценок пока нет
- Ahmad ProjДокумент11 страницAhmad ProjSaifОценок пока нет
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkДокумент7 страницModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewОценок пока нет
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsДокумент4 страницыSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்Оценок пока нет
- Ga Speed and DQ Currnets Control of PMSM WithДокумент9 страницGa Speed and DQ Currnets Control of PMSM Withhieuhuech1Оценок пока нет
- DC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesДокумент9 страницDC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesWen ZJОценок пока нет
- The DQ Transformation and Feedback Linearization of A Permanent Magnet Synchronous MotorДокумент5 страницThe DQ Transformation and Feedback Linearization of A Permanent Magnet Synchronous MotorUzairChaudharyОценок пока нет
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveДокумент5 страницDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourОценок пока нет
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorДокумент7 страницA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesОценок пока нет
- Modeling and Simulation of Reluctance Motor Using Digital ComputerДокумент5 страницModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatОценок пока нет
- Simulation of Electric Machinery and Power Electronics InterfacingДокумент6 страницSimulation of Electric Machinery and Power Electronics Interfacingadilo7780Оценок пока нет
- Generator Dynamics Influence On Currents Distribution in Fault Condition - D. StojanovicДокумент6 страницGenerator Dynamics Influence On Currents Distribution in Fault Condition - D. StojanovicbajricaОценок пока нет
- A Unified Method For Modeling and Simulation of Three Phase Induction Motor DrivesДокумент5 страницA Unified Method For Modeling and Simulation of Three Phase Induction Motor Drivesdhirajbharat20Оценок пока нет
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFДокумент5 страницAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaОценок пока нет
- Lab 3 Squirrel Cage Induction Machine-1Документ8 страницLab 3 Squirrel Cage Induction Machine-1max100% (1)
- DC Motor SimulinkДокумент8 страницDC Motor SimulinkMELVINОценок пока нет
- Motor Star Delta ConnectionДокумент11 страницMotor Star Delta ConnectionsubirmeОценок пока нет
- Modeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlДокумент6 страницModeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlFarhan SarwarОценок пока нет
- Dynamic Model of A Permanent Magnet DC Motor: Projects For StudentsДокумент8 страницDynamic Model of A Permanent Magnet DC Motor: Projects For StudentsAlyssonAlmeidaОценок пока нет
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodДокумент4 страницыComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciОценок пока нет
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsДокумент7 страницEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainОценок пока нет
- Speed Control of DC Motor by Armature Resistance ControlДокумент8 страницSpeed Control of DC Motor by Armature Resistance ControlKosigar ChelladoraiОценок пока нет
- Labview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonДокумент8 страницLabview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonR Sathish Kumar KumarОценок пока нет
- FEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultДокумент6 страницFEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultbaradaranhamidОценок пока нет
- He Speed Control of The Induction Motors by The Change of Suply VoltageДокумент4 страницыHe Speed Control of The Induction Motors by The Change of Suply VoltagePradeep RajasekeranОценок пока нет
- Electrical Machines Lab ManualДокумент41 страницаElectrical Machines Lab Manualsohaib hashmatОценок пока нет
- Dynamic Improvement of Distribution Systems Using DSTATCOM Voltage ControlДокумент5 страницDynamic Improvement of Distribution Systems Using DSTATCOM Voltage ControlVinod Kumar VudathaОценок пока нет
- Study of Impulse Voltage Distribution in Transformer WindingsДокумент5 страницStudy of Impulse Voltage Distribution in Transformer WindingsBhuvanes Waran100% (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Numerical On 3 Phase Induction MotorДокумент1 страницаNumerical On 3 Phase Induction MotorAnonymous m8oCtJBОценок пока нет
- Field Theory Vector AlgebraДокумент41 страницаField Theory Vector Algebraleon619Оценок пока нет
- Field Theory ElectrostaticsДокумент61 страницаField Theory Electrostaticsleon619100% (1)
- Field Theory MAGNETOSTATICSДокумент92 страницыField Theory MAGNETOSTATICSleon619Оценок пока нет
- Field Theory Electrostatics IIДокумент104 страницыField Theory Electrostatics IIleon619100% (1)
- Transformer calculations boost converter 1-phase transformer induction motor parametersДокумент2 страницыTransformer calculations boost converter 1-phase transformer induction motor parametersAnonymous m8oCtJBОценок пока нет
- 52 EE 2 1 Sarbendu Chakraborty: Name University Roll No. Department Semester YearДокумент36 страниц52 EE 2 1 Sarbendu Chakraborty: Name University Roll No. Department Semester YearAnonymous m8oCtJBОценок пока нет
- Ch9Sources of Magnetic FieldsДокумент69 страницCh9Sources of Magnetic FieldsSamina KhanОценок пока нет
- MAKAUT, WB Encourages Technology Internships During LockdownДокумент29 страницMAKAUT, WB Encourages Technology Internships During LockdownSaura Shuvra KumarОценок пока нет
- Substation On 23/09/2019 (Monday) - Sl. No. Name Class Roll NoДокумент1 страницаSubstation On 23/09/2019 (Monday) - Sl. No. Name Class Roll NoAnonymous m8oCtJBОценок пока нет
- 4.TiE Delhi PDFДокумент16 страниц4.TiE Delhi PDFpriyakanthr5883Оценок пока нет
- Raman Innovation PDFДокумент20 страницRaman Innovation PDFAnonymous m8oCtJBОценок пока нет
- Asst. Innovation DirectorДокумент24 страницыAsst. Innovation DirectorAnonymous m8oCtJBОценок пока нет
- Market Research 2Документ82 страницыMarket Research 2Anonymous m8oCtJBОценок пока нет
- Product Design & Engineering For Developing A Product, A Start-Up's PerspectiveДокумент48 страницProduct Design & Engineering For Developing A Product, A Start-Up's PerspectiveSuraj KushwahaОценок пока нет
- Legal and Ethical Steps: Productive Entrepreneurship & StartupДокумент34 страницыLegal and Ethical Steps: Productive Entrepreneurship & StartupAnonymous m8oCtJBОценок пока нет
- MAKAUT, WB Encourages Technology Internships During LockdownДокумент29 страницMAKAUT, WB Encourages Technology Internships During LockdownSaura Shuvra KumarОценок пока нет
- Ring Resonators Theory and ModelingДокумент39 страницRing Resonators Theory and ModelingtrojanlightОценок пока нет
- Progress Report: Indian Institute of Technology (Ism), Dhanbad. Department of Electrical EngineeringДокумент16 страницProgress Report: Indian Institute of Technology (Ism), Dhanbad. Department of Electrical EngineeringAnonymous m8oCtJBОценок пока нет
- PSM 102 Set 2 Nodal Voltage EquationsДокумент2 страницыPSM 102 Set 2 Nodal Voltage EquationsAnonymous m8oCtJBОценок пока нет
- Performance of Optical Microring Resonator As Multiplexer and All-Optical Logic Shifter in Z-DomainДокумент12 страницPerformance of Optical Microring Resonator As Multiplexer and All-Optical Logic Shifter in Z-DomainAnonymous m8oCtJBОценок пока нет
- Nidhi J K Flip Flop OEДокумент10 страницNidhi J K Flip Flop OEAnonymous m8oCtJBОценок пока нет
- Narula Institute of Technology: 2017 High Voltage Transmission SystemДокумент2 страницыNarula Institute of Technology: 2017 High Voltage Transmission SystemAnonymous m8oCtJBОценок пока нет
- Narula Institute of Technology: 2017 High Voltage Transmission SystemДокумент2 страницыNarula Institute of Technology: 2017 High Voltage Transmission SystemAnonymous m8oCtJBОценок пока нет
- PHDДокумент1 страницаPHDAnonymous m8oCtJBОценок пока нет
- DHN-KOLKATA 13-05-2018 DHIRAJ MONDAL +1... - JIS Group Education Initiatives MailДокумент3 страницыDHN-KOLKATA 13-05-2018 DHIRAJ MONDAL +1... - JIS Group Education Initiatives MailAnonymous m8oCtJBОценок пока нет
- PSM 102 Set 2 Nodal Voltage EquationsДокумент2 страницыPSM 102 Set 2 Nodal Voltage EquationsAnonymous m8oCtJBОценок пока нет
- CRITERION 4 .5 Student ChapterДокумент8 страницCRITERION 4 .5 Student ChapterAnonymous m8oCtJBОценок пока нет
- Ug Sar Tier I Final Ver 1.0 NEW FinalДокумент13 страницUg Sar Tier I Final Ver 1.0 NEW FinalAnonymous m8oCtJBОценок пока нет
- Core A Araujo 2016Документ11 страницCore A Araujo 2016Anonymous m8oCtJBОценок пока нет
- Expt.3 ME2612L Individual Report Group 5Документ15 страницExpt.3 ME2612L Individual Report Group 5Dan Joshua EspinaОценок пока нет
- Datasheet PDFДокумент10 страницDatasheet PDFViola Safa Nur AnnisaОценок пока нет
- Electronic Devices & Circuits SyllabusДокумент4 страницыElectronic Devices & Circuits SyllabusShareef KhanОценок пока нет
- MS (Se) SyllabusДокумент93 страницыMS (Se) SyllabusSrinath MsvitОценок пока нет
- ELECTRONIC COMPONENTS HandoutДокумент22 страницыELECTRONIC COMPONENTS HandoutVineeth WilsonОценок пока нет
- PDFДокумент4 страницыPDFKrloz Gomez ValladaresОценок пока нет
- Elex QuexДокумент75 страницElex QuexJHOEMEL TANGO100% (1)
- Problem Statement:: Fig. 1: Zener Diode SymbolДокумент10 страницProblem Statement:: Fig. 1: Zener Diode SymbolTalha JabbarОценок пока нет
- IRF 7341 - Mosfet de PotênciaДокумент7 страницIRF 7341 - Mosfet de PotênciaTiago LeonhardtОценок пока нет
- Chapter 3 DiodeДокумент246 страницChapter 3 DiodeLittle VoiceОценок пока нет
- Kalkhoff Pedelec ManualДокумент11 страницKalkhoff Pedelec Manualbarbaluka9Оценок пока нет
- 60R580P MagnaChipДокумент10 страниц60R580P MagnaChipAlfredo Valencia RodriguezОценок пока нет
- Material Science: Development TeamДокумент14 страницMaterial Science: Development TeamTejinder SinghОценок пока нет
- 9m ELECTRONIC DEVICES PDFДокумент65 страниц9m ELECTRONIC DEVICES PDFSamaira DsouzaОценок пока нет
- Electrical Symbols & Electronic SymbolsДокумент3 страницыElectrical Symbols & Electronic Symbolsprecious umingaОценок пока нет
- LIC & ApplicationsДокумент92 страницыLIC & ApplicationsAbhiroop VermaОценок пока нет
- Diploma - Applied Physics-II - EnglishДокумент23 страницыDiploma - Applied Physics-II - EnglishRamanarayanSankritiОценок пока нет
- Gravity Detector MagazineДокумент4 страницыGravity Detector MagazineBlake Robbins100% (1)
- V-I Characteristics of Zener Diode and its Application as Zener LimiterДокумент4 страницыV-I Characteristics of Zener Diode and its Application as Zener LimiterShahZaib AnwarОценок пока нет
- Ixys dpg60c300hb Datasheets 9568Документ5 страницIxys dpg60c300hb Datasheets 9568matesimic50Оценок пока нет
- Electrician TestДокумент39 страницElectrician TestSaroh Lim92% (78)
- Lab Manual Edc JntuhДокумент92 страницыLab Manual Edc JntuhsfagdfgdfОценок пока нет
- 2N65 (F, B, H, G, D) S: 2 Amps, 650 Volts N-Channel Super Junction Power MOSFETДокумент9 страниц2N65 (F, B, H, G, D) S: 2 Amps, 650 Volts N-Channel Super Junction Power MOSFETPedro RodriguezОценок пока нет
- IEC 60079-18 - 2009 - Encapsulated Protection - Ex M PDFДокумент35 страницIEC 60079-18 - 2009 - Encapsulated Protection - Ex M PDFRadu Babau100% (1)
- Sem 3,4,5,6,7,8-Syllabus & Sem 3-Time TableДокумент210 страницSem 3,4,5,6,7,8-Syllabus & Sem 3-Time TabledffsfsОценок пока нет
- P-N JunctionДокумент14 страницP-N JunctionsahilОценок пока нет
- DiodeДокумент39 страницDiodeMr humanОценок пока нет
- Design, simulate and implement a 5V DC power supply with filterДокумент15 страницDesign, simulate and implement a 5V DC power supply with filterHARSHIL HARSHIL GUPTAОценок пока нет
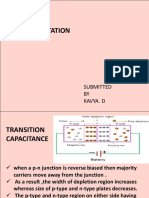
- Physics Presentation: Submitted BY Kavya. DДокумент15 страницPhysics Presentation: Submitted BY Kavya. DKiran KiruОценок пока нет
- Troubleshooting Guide: Lestronic Ii Battery Charger For Motive Power BatteriesДокумент8 страницTroubleshooting Guide: Lestronic Ii Battery Charger For Motive Power BatteriesRomuald Eric TefongОценок пока нет