Вам также может понравиться
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasДокумент45 страницAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasHayyan JarboueОценок пока нет
- Advance Structural Analysis (Internal Hinge) - Devdas MenomДокумент42 страницыAdvance Structural Analysis (Internal Hinge) - Devdas MenomLuis MontoyaОценок пока нет
- Box Culvert Design PDFДокумент44 страницыBox Culvert Design PDFSachin RameshОценок пока нет
- Lec 14Документ13 страницLec 14Janaki RamanОценок пока нет
- Matrix Method of AnalysisДокумент28 страницMatrix Method of AnalysisEvans LionОценок пока нет
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasДокумент35 страницAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasParmeshwar KushwahaОценок пока нет
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasДокумент34 страницыAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madrasprince francisОценок пока нет
- Lec 12Документ33 страницыLec 12Arun GoyalОценок пока нет
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasДокумент38 страницAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madrasprince francisОценок пока нет
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Документ30 страницIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranОценок пока нет
- Lec 20Документ35 страницLec 20MallikarjunPerumallaОценок пока нет
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madras Module No. # 1.3 Lecture No. # 03 Review of Basic Structural Analysis - 1Документ32 страницыAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madras Module No. # 1.3 Lecture No. # 03 Review of Basic Structural Analysis - 1MananshОценок пока нет
- Direct Stiffness35Документ38 страницDirect Stiffness35N TОценок пока нет
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 26Документ26 страницIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 26mahendranОценок пока нет
- Structural Analysis II Prof. P. Banerjee Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 10Документ16 страницStructural Analysis II Prof. P. Banerjee Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 10SaidОценок пока нет
- Lec 25Документ11 страницLec 25juneedyawarОценок пока нет
- Lec 3Документ17 страницLec 3shivaranjaniОценок пока нет
- Lec 22Документ13 страницLec 22Ravinder Reddy SimalaОценок пока нет
- Lec 22Документ13 страницLec 22Jamvanti PandeyОценок пока нет
- Lec 21Документ18 страницLec 21Adeoti OladapoОценок пока нет
- Advance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasДокумент26 страницAdvance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasMahmoudMatarОценок пока нет
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurДокумент15 страницComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpurk krishna chaitanyaОценок пока нет
- Lec 6Документ20 страницLec 6ዘረአዳም ዘመንቆረርОценок пока нет
- Good Morning To You. We Are Now On To Lecture 8 in The Second Module On Review of Basic Structural AnalysisДокумент28 страницGood Morning To You. We Are Now On To Lecture 8 in The Second Module On Review of Basic Structural AnalysisLesego Les RatlhogoОценок пока нет
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrasДокумент40 страницExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrastamizhanОценок пока нет
- Splash PhysicsДокумент18 страницSplash PhysicsRafael CampoyОценок пока нет
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17Документ26 страницIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17mahendranОценок пока нет
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 28Документ24 страницыIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 28mahendranОценок пока нет
- Lec40 PDFДокумент23 страницыLec40 PDFpothirajОценок пока нет
- MIT TrigДокумент42 страницыMIT TrigMaithy TonОценок пока нет
- Lec 15Документ18 страницLec 15Janaki RamanОценок пока нет
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12Документ22 страницыIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12mahendranОценок пока нет
- Bioinformatics Prof. M. Michael Gromiha Department of Biotechnology Indian Institute of Technology, Madras Lecture - 7b Sequence Alignment IIДокумент26 страницBioinformatics Prof. M. Michael Gromiha Department of Biotechnology Indian Institute of Technology, Madras Lecture - 7b Sequence Alignment IIPrativa DebОценок пока нет
- Lec 65Документ9 страницLec 65prince francisОценок пока нет
- Lec 12Документ17 страницLec 12SharathОценок пока нет
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9Документ24 страницыAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9abimanaОценок пока нет
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasДокумент45 страницAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasAshutosh Yadav0% (1)
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleДокумент12 страницTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 22Документ8 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 22Dharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Документ6 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Dharmendra JainОценок пока нет
- Lec 12Документ12 страницLec 12Seshan SahooОценок пока нет
- Disecting ShapesДокумент9 страницDisecting ShapesjoshwaltmireОценок пока нет
- Operations On MatricesДокумент35 страницOperations On MatricesK SrinivasОценок пока нет
- Torsionless Grillage AnalysisДокумент28 страницTorsionless Grillage AnalysisAnonymous 1HFV185Sl4Оценок пока нет
- Lec 21Документ16 страницLec 21Tshering Sangmoo SherpaОценок пока нет
- Pipeline Concepts - Collision AvoidanceДокумент9 страницPipeline Concepts - Collision AvoidancePrabakaran EllaiyappanОценок пока нет
- (Massachusetts Institute of Technology: Mit Opencourseware)Документ9 страниц(Massachusetts Institute of Technology: Mit Opencourseware)Igor CamposОценок пока нет
- Lec 13Документ20 страницLec 13SharathОценок пока нет
- (Massachusetts Institute of Technology: Mit Opencourseware)Документ11 страниц(Massachusetts Institute of Technology: Mit Opencourseware)Igor CamposОценок пока нет
- Lec 9Документ10 страницLec 9Rajendra singhОценок пока нет
- Power System Generation, Transmission and Distribution Prof. D. P. Kothari Department of Electrical Engineering Indian Institute of Technology, DelhiДокумент14 страницPower System Generation, Transmission and Distribution Prof. D. P. Kothari Department of Electrical Engineering Indian Institute of Technology, DelhipawankmrshОценок пока нет
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Документ25 страницIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4mahendranОценок пока нет
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurДокумент18 страницComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kОценок пока нет
- Technical Arts 101 Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 5Документ11 страницTechnical Arts 101 Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 5Anonymous 5KGkE3VОценок пока нет
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasДокумент29 страницExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrastamizhanОценок пока нет
- Turbomachinery Aerodynamics Prof. Bhaskar Roy Prof. A M Pradeep Department of Aerospace Engineering Indian Institute of Technology, BombayДокумент30 страницTurbomachinery Aerodynamics Prof. Bhaskar Roy Prof. A M Pradeep Department of Aerospace Engineering Indian Institute of Technology, BombayMikayel AghajanyanОценок пока нет
- Linear and Volumetric Deformation Perspectives From Mass ConservationДокумент10 страницLinear and Volumetric Deformation Perspectives From Mass ConservationghulamhabibscmeОценок пока нет
- Lec 39Документ20 страницLec 39tamizhanОценок пока нет
- DESAGUE HCO-planta GeneralДокумент1 страницаDESAGUE HCO-planta GeneralEstephanie AVОценок пока нет
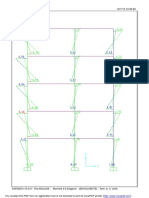
- Eje B-BДокумент1 страницаEje B-BEstephanie AVОценок пока нет
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterДокумент1 страницаYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterEstephanie AVОценок пока нет
- Sss ShoolДокумент1 страницаSss ShoolEstephanie AVОценок пока нет
- Eje B-BДокумент1 страницаEje B-BEstephanie AVОценок пока нет
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterДокумент1 страницаYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterEstephanie AVОценок пока нет
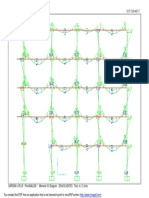
- Eje 4-4Документ1 страницаEje 4-4Estephanie AVОценок пока нет
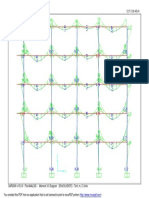
- Eje 2-2Документ1 страницаEje 2-2Estephanie AVОценок пока нет
- Steel Beam DesignДокумент8 страницSteel Beam DesignKatracho2Оценок пока нет
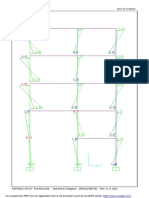
- Eje C-CДокумент1 страницаEje C-CEstephanie AVОценок пока нет
- Eje 5-5Документ1 страницаEje 5-5Estephanie AVОценок пока нет
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterДокумент1 страницаYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterEstephanie AVОценок пока нет
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterДокумент1 страницаYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterEstephanie AVОценок пока нет
- 3DДокумент1 страница3DEstephanie AVОценок пока нет
- EM 1110-2-2104 - Strength Design For Reinforced Concrete Hydraulic Structures 1Документ75 страницEM 1110-2-2104 - Strength Design For Reinforced Concrete Hydraulic Structures 1PDHLibraryОценок пока нет
- Charles Tart - Learning To Use Extrasensory Perception (OCR)Документ184 страницыCharles Tart - Learning To Use Extrasensory Perception (OCR)apurvyadav92% (12)
- Ganapati AtharvashirshaДокумент4 страницыGanapati AtharvashirshamalarvkОценок пока нет
- Geography World Landmark Game Presentation-3Документ12 страницGeography World Landmark Game Presentation-34w6hsqd4fkОценок пока нет
- Haves Without Have-Nots - Mortimer J. AdlerДокумент377 страницHaves Without Have-Nots - Mortimer J. AdlerA100% (1)
- Case Study Evaluation RubricДокумент1 страницаCase Study Evaluation RubricalamtareqОценок пока нет
- The MountДокумент6 страницThe Mountcrazykate000Оценок пока нет
- RESUME, Sharad PaudyalДокумент2 страницыRESUME, Sharad PaudyalSharad PaudyalОценок пока нет
- History YGLMДокумент28 страницHistory YGLMJorge PsicoalternaОценок пока нет
- Saravanan ThesisДокумент207 страницSaravanan ThesisUnimarks Legal Solutions100% (1)
- A3 ASD Mind MapДокумент1 страницаA3 ASD Mind Mapehopkins5_209Оценок пока нет
- Aristotle Nicomachean EthicsДокумент10 страницAristotle Nicomachean EthicsCarolineKolopskyОценок пока нет
- Edmund Dulac, W B Yeats and The MagiДокумент23 страницыEdmund Dulac, W B Yeats and The MagiRaphael888Оценок пока нет
- Chapter 6 - Leadership and Team Building (Adair J, 2004)Документ40 страницChapter 6 - Leadership and Team Building (Adair J, 2004)hss601Оценок пока нет
- Types of Tests Used in Special EducationДокумент5 страницTypes of Tests Used in Special EducationCbrc CebuОценок пока нет
- Heart of ThelemaДокумент15 страницHeart of ThelemaSihaya Núna100% (1)
- Significance of Rosary in SikhismДокумент9 страницSignificance of Rosary in SikhismhansrabОценок пока нет
- Nieva Vs DeocampoДокумент5 страницNieva Vs DeocampofemtotОценок пока нет
- PNB V Zulueta 2Документ9 страницPNB V Zulueta 2april750% (1)
- Miniature Magazine - Issue 1Документ14 страницMiniature Magazine - Issue 1Mini_MagОценок пока нет
- Selection ProcessДокумент3 страницыSelection ProcessJehndad Alam KhattakОценок пока нет
- College Graduation SpeechДокумент2 страницыCollege Graduation SpeechAndre HiyungОценок пока нет
- 1956-Chayes. - Petrographic Modal AnalysisДокумент120 страниц1956-Chayes. - Petrographic Modal AnalysisdmsanchezcОценок пока нет
- Conflict Resolution in Community Setting (Part-II)Документ20 страницConflict Resolution in Community Setting (Part-II)S.Rengasamy100% (3)
- Mother-Daughter CommunicationДокумент25 страницMother-Daughter Communicationluvpetunia100% (2)
- SQ4R StrategyДокумент2 страницыSQ4R StrategyRelu ChiruОценок пока нет
- The Anthropocene Review 1 2Документ95 страницThe Anthropocene Review 1 2bordigaОценок пока нет
- Essay For EnglishДокумент3 страницыEssay For EnglishThe Darth GiraffeОценок пока нет
- Leadership Theories and Styles: A Literature Review: January 2016Документ8 страницLeadership Theories and Styles: A Literature Review: January 2016Essa BagusОценок пока нет
- PYPX PlannerДокумент4 страницыPYPX PlannerhgendiОценок пока нет
- Why Should I Hire You - Interview QuestionsДокумент12 страницWhy Should I Hire You - Interview QuestionsMadhu Mahesh Raj100% (1)