Вам также может понравиться
- Operator's Guide to General Purpose Steam Turbines: An Overview of Operating Principles, Construction, Best Practices, and TroubleshootingОт EverandOperator's Guide to General Purpose Steam Turbines: An Overview of Operating Principles, Construction, Best Practices, and TroubleshootingРейтинг: 5 из 5 звезд5/5 (1)
- Boiler Control Systems Engineering, Second EditionОт EverandBoiler Control Systems Engineering, Second EditionРейтинг: 4.5 из 5 звезд4.5/5 (15)
- Boiler-Tuning Basics, Part II PDFДокумент12 страницBoiler-Tuning Basics, Part II PDFIain NeillОценок пока нет
- 3 SGC VacuumДокумент9 страниц3 SGC VacuumSamОценок пока нет
- InterlocksДокумент26 страницInterlocksFelipe SandovalОценок пока нет
- Boiler Operating CourseДокумент74 страницыBoiler Operating Courseknx175Оценок пока нет
- 01 FSSS Basic Concept and STDДокумент24 страницы01 FSSS Basic Concept and STDgaurav tiwariОценок пока нет
- Superctrical BoilerДокумент43 страницыSuperctrical Boilerak_thimiri100% (1)
- Control & Automation For Super Critical UnitsДокумент46 страницControl & Automation For Super Critical Unitsbsiva9Оценок пока нет
- Boiler Learning ModuleДокумент158 страницBoiler Learning ModuleMallinatha PNОценок пока нет
- LP by Pass System: May 24, 2012 PMI Revision 00 1Документ40 страницLP by Pass System: May 24, 2012 PMI Revision 00 1Sam100% (2)
- Why Efficiency in Thermal Power Plant Is LowДокумент1 страницаWhy Efficiency in Thermal Power Plant Is LowNallathambiОценок пока нет
- Extraction Condensing Steam TurbineДокумент3 страницыExtraction Condensing Steam TurbineNaeemSiddiquiОценок пока нет
- Analysis of Feed WaterДокумент9 страницAnalysis of Feed Watersanju0156Оценок пока нет
- Turbine Performance MonitoringДокумент35 страницTurbine Performance MonitoringNaval Gupta100% (2)
- Heat and Mass Balance Index: S.N. Topics Page NosДокумент50 страницHeat and Mass Balance Index: S.N. Topics Page NosRavi Satyapal100% (1)
- 660 MW Sipat BoilerДокумент88 страниц660 MW Sipat BoilerNavneet SinghОценок пока нет
- Cold-Start Up of Coal Fired PowerplantsДокумент6 страницCold-Start Up of Coal Fired PowerplantsAbdulyunus AmirОценок пока нет
- Turbine & Aux CommsgДокумент84 страницыTurbine & Aux CommsgSam100% (1)
- Turbine Prestartup ChecklistДокумент4 страницыTurbine Prestartup ChecklistSCE SOLAPURОценок пока нет
- Boiler InterlockДокумент25 страницBoiler InterlockapsОценок пока нет
- تشغيل محطة بخارية مهم ورائع PDFДокумент157 страницتشغيل محطة بخارية مهم ورائع PDFelsayed100% (1)
- Condensate Cycle SystemДокумент26 страницCondensate Cycle SystemBhumit Sagathiya100% (2)
- 330mw DEHДокумент22 страницы330mw DEHkeerthi dayarathnaОценок пока нет
- Super Critical Power PLANTSДокумент33 страницыSuper Critical Power PLANTSSankar Achary100% (1)
- Boiler TuningДокумент44 страницыBoiler Tuningjohan budiОценок пока нет
- 0704 MCS System Logic Design Instruction PDFДокумент28 страниц0704 MCS System Logic Design Instruction PDFrahul100% (1)
- HP/LP Bypass Automation: Function DescriptionДокумент14 страницHP/LP Bypass Automation: Function DescriptionMohit GohilОценок пока нет
- Boiler-Tuning Basics, Part IДокумент13 страницBoiler-Tuning Basics, Part IIain NeillОценок пока нет
- Boiler EfficiencyДокумент24 страницыBoiler EfficiencyAmit ChauhanОценок пока нет
- Turbine Start UpДокумент15 страницTurbine Start UprobiansahОценок пока нет
- COal Fired Plants FlexibilityДокумент32 страницыCOal Fired Plants FlexibilityVeerabhadra Rao KorimilliОценок пока нет
- HP-Bypass and LP BypassДокумент3 страницыHP-Bypass and LP Bypassdinesh7136100% (1)
- Boiler Operation On DcsДокумент4 страницыBoiler Operation On Dcsarif100% (2)
- Steam TurbinesДокумент45 страницSteam TurbinesHaseeb Bokhari100% (1)
- Suspension (PC) Combustion: Chungen YinДокумент47 страницSuspension (PC) Combustion: Chungen YinAakash RanjanОценок пока нет
- C&I Part of SCДокумент28 страницC&I Part of SCSam100% (1)
- Furnace Presure ControllerДокумент46 страницFurnace Presure ControllerAnu Pillai0% (1)
- Sootblowing OptimizationДокумент9 страницSootblowing OptimizationvnchromeОценок пока нет
- Air Heater PerformanceДокумент20 страницAir Heater PerformanceSam100% (1)
- 200 MWДокумент36 страниц200 MWphilocloudОценок пока нет
- SuperCritical Boiler 1Документ45 страницSuperCritical Boiler 1swatantar17100% (1)
- Engineering Bulletin No 1: Boiler and Furnace TestingОт EverandEngineering Bulletin No 1: Boiler and Furnace TestingРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Boiler InterlocksДокумент54 страницыBoiler InterlocksAhemadОценок пока нет
- Turbine Operational ProblemsДокумент35 страницTurbine Operational Problemsna2011100% (1)
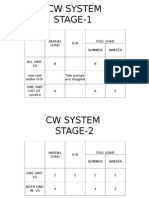
- Partial Load O/H Full Load Summer WinterДокумент19 страницPartial Load O/H Full Load Summer WinterNitin SinghОценок пока нет
- Gek 107061Документ10 страницGek 107061Anup MitraОценок пока нет
- Best 60 Power Plant Information Booster Points - AskpowerplantДокумент17 страницBest 60 Power Plant Information Booster Points - AskpowerplantRaju MaityОценок пока нет
- Rafako CFBC Boiler PDFДокумент13 страницRafako CFBC Boiler PDFadehriya100% (1)
- Unit Shut Down ProcedureДокумент41 страницаUnit Shut Down ProcedurePuspaanjaliОценок пока нет
- HP LP Bypass System: Ravi Pal SinghДокумент36 страницHP LP Bypass System: Ravi Pal SinghMinh Hoang NguyenОценок пока нет
- Presented By: Souvanik Chakravorty S Anil Kumar Tatithuri G SrikantДокумент30 страницPresented By: Souvanik Chakravorty S Anil Kumar Tatithuri G Srikants anil kumar tatithuriОценок пока нет
- 4 SGC Oil SupplyДокумент11 страниц4 SGC Oil SupplySamОценок пока нет
- Boiler Feed Pump SavingДокумент28 страницBoiler Feed Pump SavingDramebaaz SandeepОценок пока нет
- Boiler OverviewДокумент35 страницBoiler Overviewshashank dasОценок пока нет
- TTD PerformanceДокумент5 страницTTD PerformanceSriraja RajapОценок пока нет
- Boiler NotesДокумент34 страницыBoiler NotesRakesh Singh BhadoriyaОценок пока нет
- Performance Evaluation of Typical FurnacesДокумент9 страницPerformance Evaluation of Typical FurnacesKuldeep RupareliaОценок пока нет
- DraughtДокумент33 страницыDraughtNipun SabharwalОценок пока нет
- Typical Boiler Erection SequenceДокумент83 страницыTypical Boiler Erection SequenceSrinivasa100% (1)
- Boiler Efficiency CalculationДокумент5 страницBoiler Efficiency CalculationMutiara ValentinaОценок пока нет
- Master DegreeДокумент87 страницMaster DegreeAida AliyevaОценок пока нет
- Process Industry Practices Coatings: PIP CTCE1000 External Coating System Selection CriteriaДокумент27 страницProcess Industry Practices Coatings: PIP CTCE1000 External Coating System Selection CriteriaCarlos Maldonado SalazarОценок пока нет
- CrackingДокумент33 страницыCrackingEman El DsoukyОценок пока нет
- Data Sheet Indirect Fired Heater NapkjsДокумент12 страницData Sheet Indirect Fired Heater Napkjsahmad santosoОценок пока нет
- Earl's Home Warranty PlanДокумент12 страницEarl's Home Warranty PlanKelsie JacksonОценок пока нет
- On BiomassДокумент364 страницыOn BiomassRusty MacCharlesОценок пока нет
- Carbon DisulfideДокумент12 страницCarbon DisulfideMelissa Daniela Romero TrujilloОценок пока нет
- BOILER-trouble ShootingДокумент5 страницBOILER-trouble ShootingAnonymous Q9i062VОценок пока нет
- Lead Smelting Equipments - Aswathi Industries LimitedДокумент1 страницаLead Smelting Equipments - Aswathi Industries LimitedmOHITОценок пока нет
- Pack Firetube BoilersДокумент5 страницPack Firetube BoilersNath BoyapatiОценок пока нет
- CO2 Reduction From Glass Melting Furnaces by Oxy-Guel Firing Combined With BatchCullet PreheatingДокумент5 страницCO2 Reduction From Glass Melting Furnaces by Oxy-Guel Firing Combined With BatchCullet PreheatingtedmozbiОценок пока нет
- A Manual On Dental Metallurgy.Документ334 страницыA Manual On Dental Metallurgy.Richard.nlОценок пока нет
- Standards and Guidelines List NfpaДокумент29 страницStandards and Guidelines List NfpaReinel OrjuelaОценок пока нет
- U BeamsДокумент8 страницU BeamsAmitav MishraОценок пока нет
- Instruction Operation For Packaged BoilerДокумент37 страницInstruction Operation For Packaged BoilerHasnul Hisyam Harun0% (1)
- FW Visbreaker HeatersДокумент5 страницFW Visbreaker HeatersZita MoreiraОценок пока нет
- Enercare Terms and Conditions Nov 21 2016Документ16 страницEnercare Terms and Conditions Nov 21 2016Damon SchreiberОценок пока нет
- Aprilaire Stat 3041 - InstallДокумент28 страницAprilaire Stat 3041 - InstallRetro SeasonsОценок пока нет
- YORK® 50 Ton To 65 Ton, YPAL Design Level F, Single Packaged Rooftop Units, Installation, Operation, and Maintenance ManualДокумент164 страницыYORK® 50 Ton To 65 Ton, YPAL Design Level F, Single Packaged Rooftop Units, Installation, Operation, and Maintenance ManualMaqbool MОценок пока нет
- 500 MW Boiler FeaturesДокумент8 страниц500 MW Boiler FeaturesKeyur PatelОценок пока нет
- A Working Guide To Process Equipment ContentДокумент13 страницA Working Guide To Process Equipment ContentMichael Cabalfin100% (1)
- OTE Outotec LURO2 Sulfur Burner Eng WebДокумент4 страницыOTE Outotec LURO2 Sulfur Burner Eng WebI. Murali KrishnaОценок пока нет
- JIS JFE Pipe and TubeДокумент25 страницJIS JFE Pipe and Tubedavorp1402Оценок пока нет
- EI6002 Power Plant Instrumentation Question BankДокумент14 страницEI6002 Power Plant Instrumentation Question BankDon N100% (1)
- The Carbon Trust PublicationДокумент14 страницThe Carbon Trust PublicationFernando GómezОценок пока нет
- Boiler EfficiencyДокумент28 страницBoiler EfficiencyRintu BiswasОценок пока нет