Вам также может понравиться
- Cours STRATEGIE DE MAINTENANCE PDFДокумент67 страницCours STRATEGIE DE MAINTENANCE PDFamekhzoumi80% (5)
- TP Initiation Au Fraisage CN PDFДокумент9 страницTP Initiation Au Fraisage CN PDFAymen HssainiОценок пока нет
- 120 - Couts de Maintenance - Prof - Retour Sur InvestissemenДокумент8 страниц120 - Couts de Maintenance - Prof - Retour Sur InvestissemenAymen Hssaini100% (1)
- Gammes Maintenance Preventive MAERAДокумент4 страницыGammes Maintenance Preventive MAERAAymen HssainiОценок пока нет
- Guide PL7 Pro Connecter Et TransfererДокумент1 страницаGuide PL7 Pro Connecter Et TransfererAymen HssainiОценок пока нет
- FreДокумент347 страницFreAymen HssainiОценок пока нет
- KONE GuideEntretienMaintenanceSécurité 2016Документ30 страницKONE GuideEntretienMaintenanceSécurité 2016Aymen HssainiОценок пока нет
- 1hydrauliqParisTech PDFДокумент34 страницы1hydrauliqParisTech PDFAymen HssainiОценок пока нет
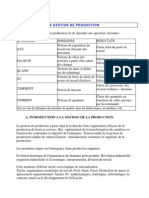
- Module Gestion de La ProductionДокумент78 страницModule Gestion de La ProductionEl Jaouad67% (3)
- Cours PDFДокумент150 страницCours PDFAymen HssainiОценок пока нет
- 1.la Maintenance Au Sein de LentrepriseДокумент3 страницы1.la Maintenance Au Sein de LentrepriseAymen HssainiОценок пока нет
- Chrono 01 PDFДокумент32 страницыChrono 01 PDFAymen HssainiОценок пока нет
- Cours Mec 12Документ7 страницCours Mec 12Aymen HssainiОценок пока нет
- BTS Constructions MetalliquesДокумент2 страницыBTS Constructions MetalliquesAymen HssainiОценок пока нет
- Guide de Conception Des Reseaux Electrique Industriels by Genie Electromcanique ComДокумент6 страницGuide de Conception Des Reseaux Electrique Industriels by Genie Electromcanique ComAymen Hssaini100% (1)
- 09 - TD - FiabiliteДокумент5 страниц09 - TD - FiabiliteMaria Amina100% (14)
- 09 - TD - FiabiliteДокумент7 страниц09 - TD - FiabiliteAymen HssainiОценок пока нет
- 02 Gestion Des Interventions PDFДокумент9 страниц02 Gestion Des Interventions PDFAymen HssainiОценок пока нет
- Rapport de Stage Dans ONA TouggourtДокумент20 страницRapport de Stage Dans ONA TouggourtAmira KrimaОценок пока нет
- These CadiДокумент139 страницThese CadiHeisenberg WWОценок пока нет
- Travaux PratiqueДокумент30 страницTravaux Pratiqueيس محمدОценок пока нет
- St-Fa1 Principes de La Fabrication Additive-DuoДокумент2 страницыSt-Fa1 Principes de La Fabrication Additive-DuoBoussalem MeryemeОценок пока нет
- SP20 TE 01 19 - S01Chap2 - RetenirДокумент5 страницSP20 TE 01 19 - S01Chap2 - RetenirBatungwanayo EnzoОценок пока нет
- td2 AtomestiqueДокумент3 страницыtd2 AtomestiqueilaОценок пока нет
- Exercices SVT 5eДокумент2 страницыExercices SVT 5eBaye Faly FALL0% (1)
- Fascicule Segpa 3eme 2018 ElectriciteДокумент20 страницFascicule Segpa 3eme 2018 ElectriciteGregory CollinОценок пока нет
- Exo Type BacДокумент3 страницыExo Type Baciwiw.btpОценок пока нет
- Masque Respiratoire - SI Jour - 2022Документ4 страницыMasque Respiratoire - SI Jour - 2022My profileОценок пока нет
- MecaniqueDesFluides PDFДокумент210 страницMecaniqueDesFluides PDFSissoko Fakourou100% (1)
- Chap-2-Ondes de La Matière de Louis de BroglieДокумент27 страницChap-2-Ondes de La Matière de Louis de Broglieahmed lahlouОценок пока нет
- Metallographie SDMДокумент13 страницMetallographie SDMYoucef YoucefОценок пока нет
- DCN1 2022Документ5 страницDCN1 2022briki faical briki faicalОценок пока нет
- Oem Dlhi 1Документ7 страницOem Dlhi 1Udei SchikhauiОценок пока нет
- Les Conducteur Et Semi-ConducteurДокумент11 страницLes Conducteur Et Semi-ConducteurmaksimmadzarovskiОценок пока нет
- STDHX5000M - Analyseur de Ciments Par Fluorescence-X de Paillasse, Equipe D'un Detecteur SSD A Purge HeliumДокумент3 страницыSTDHX5000M - Analyseur de Ciments Par Fluorescence-X de Paillasse, Equipe D'un Detecteur SSD A Purge HeliumFrançois VergonОценок пока нет
- Partie 6 Chap 5 Les DosagesДокумент44 страницыPartie 6 Chap 5 Les DosagesdОценок пока нет
- 27 Corrosion Td-EnonceДокумент7 страниц27 Corrosion Td-EnonceAbdo Aiaiche100% (2)
- Équipements de Chauffage Et Locaux TechniqueДокумент13 страницÉquipements de Chauffage Et Locaux Techniquebaho btwОценок пока нет
- Corrosion 2Документ20 страницCorrosion 2Abdellah El khamlichiОценок пока нет
- TPE M.Daouas 2 - CopieДокумент56 страницTPE M.Daouas 2 - CopieChourouk MeskiniОценок пока нет
- Is 877583Документ2 страницыIs 877583ZakariaAllakiОценок пока нет
- CataloguePrepasScientifiques 2023 BD+Документ32 страницыCataloguePrepasScientifiques 2023 BD+lotfi elasriОценок пока нет
- PROB BLANC Physique P CДокумент4 страницыPROB BLANC Physique P CFranck TCHEUTCHOUAОценок пока нет
- 2011 12.cours - Chapitre4.thermoДокумент40 страниц2011 12.cours - Chapitre4.thermohamzaОценок пока нет
- Note de Calcul AdmДокумент112 страницNote de Calcul AdmFarah FerganiОценок пока нет
- Amélioration, Stabilisation Et RenforcementДокумент90 страницAmélioration, Stabilisation Et RenforcementChaker Mohamed RamziОценок пока нет
- 12 Les EvaporateursДокумент13 страниц12 Les EvaporateursakroudОценок пока нет
- AoutДокумент2 страницыAoutBaroka julien YANEОценок пока нет