Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- User Manual ELK38Документ14 страницUser Manual ELK38Krl Krl GnzalzОценок пока нет
- Literatrure ReviewДокумент12 страницLiteratrure ReviewShubham GuptaОценок пока нет
- Physical Setup System Parameters Design Criteria System EquationsДокумент55 страницPhysical Setup System Parameters Design Criteria System EquationsEca AditОценок пока нет
- Lecture 12 Deadbands, Governors, PID ControllersДокумент36 страницLecture 12 Deadbands, Governors, PID ControllersManuelОценок пока нет
- Design and Tuning of A Ratio ControllerДокумент13 страницDesign and Tuning of A Ratio ControllerEzgi CoşkunОценок пока нет
- Melsoft FR Configurator Sw3 Vf1Документ8 страницMelsoft FR Configurator Sw3 Vf1mo_be81Оценок пока нет
- Week 4 Assignment 1 SolutionДокумент10 страницWeek 4 Assignment 1 Solutionkirankuma.jagtapОценок пока нет
- PID Controller design-Z-N Method PDFДокумент12 страницPID Controller design-Z-N Method PDFKevin JoseОценок пока нет
- Ron Beaufort Training, LLC Hands-On Technical Workshops: Proportional-Only Control - Why Won't It Work?Документ11 страницRon Beaufort Training, LLC Hands-On Technical Workshops: Proportional-Only Control - Why Won't It Work?ram43Оценок пока нет
- Process Control Instrumentation - InstrumentationToolsДокумент15 страницProcess Control Instrumentation - InstrumentationToolsCarlos JimenezОценок пока нет
- Enda Et2011 Pid Temperature Controller: Technical SpecificationsДокумент4 страницыEnda Et2011 Pid Temperature Controller: Technical Specificationsdiab aliОценок пока нет
- Simplify3D Guia de Uso PDFДокумент65 страницSimplify3D Guia de Uso PDFxem3Оценок пока нет
- (Unsupervised and Semi-Supervised Learning) Xiangtao Li, Ka-Chun Wong - Natural Computing For Unsupervised Learning-Springer International Publishing (2019)Документ272 страницы(Unsupervised and Semi-Supervised Learning) Xiangtao Li, Ka-Chun Wong - Natural Computing For Unsupervised Learning-Springer International Publishing (2019)Aditya Pakala100% (1)
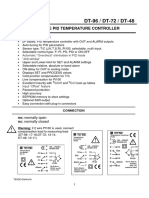
- DT-96 / DT-72 / DT-48: Auto-Tune Pid Temperature ControllerДокумент4 страницыDT-96 / DT-72 / DT-48: Auto-Tune Pid Temperature ControllerS AОценок пока нет
- CST 04Документ95 страницCST 04Sourav ChoubeyОценок пока нет
- Modline 3 Catalog MO-300 PDFДокумент8 страницModline 3 Catalog MO-300 PDFSandra SchnuellОценок пока нет
- Energy Efficient PidДокумент7 страницEnergy Efficient PidLij Girmachew Tekel HawariatОценок пока нет
- Inversor IG5A LSДокумент36 страницInversor IG5A LSBuratti2010100% (1)
- Maquina de Instrumentação PDFДокумент4 страницыMaquina de Instrumentação PDFhecirlene vieiraОценок пока нет
- Process Modelling Simulation and ControlДокумент24 страницыProcess Modelling Simulation and ControlscribideОценок пока нет
- Experiment # 5 5. Coupled Water Tanks: 5.1. ObjectivesДокумент28 страницExperiment # 5 5. Coupled Water Tanks: 5.1. ObjectivesStefany CorreaОценок пока нет
- The Improved SIMC Method For PI Controller TuningДокумент25 страницThe Improved SIMC Method For PI Controller TuningAnonymous WkbmWCa8MОценок пока нет
- Report DGA1031Документ23 страницыReport DGA1031AliОценок пока нет
- JULABO Catalog 2009-2010 enДокумент142 страницыJULABO Catalog 2009-2010 enMiihhaОценок пока нет
- Evolution of Sinusoidal Encoder InterpolatorsДокумент13 страницEvolution of Sinusoidal Encoder InterpolatorsRaulFghiОценок пока нет
- Delta DTV User ManualДокумент8 страницDelta DTV User ManualYoussef MessaoudiОценок пока нет
- Ch - - 3 (١)Документ24 страницыCh - - 3 (١)هياف هيافОценок пока нет
- 38main Temperature-Controllers PDFДокумент190 страниц38main Temperature-Controllers PDFGott PlankОценок пока нет
- BIOEN 337 ABET Style Syllabus, Updated 11 30 2012 Page 1Документ5 страницBIOEN 337 ABET Style Syllabus, Updated 11 30 2012 Page 1Nuryanti RokhmanОценок пока нет
- PIDДокумент33 страницыPIDinstind39Оценок пока нет