Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Level 3 Health and Social Care PackДокумент735 страницLevel 3 Health and Social Care PackGeorgiana Deaconu100% (4)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Physics Assessment 3 Year 11 - Vehicle Safety BeltsДокумент5 страницPhysics Assessment 3 Year 11 - Vehicle Safety Beltsparacin8131Оценок пока нет
- Tunnel IДокумент13 страницTunnel IDebasisMohapatraОценок пока нет
- An Improved Contact Algorithm For The Material PoiДокумент15 страницAn Improved Contact Algorithm For The Material PoiDebasisMohapatraОценок пока нет
- TR322Документ15 страницTR322DebasisMohapatraОценок пока нет
- Jgeot 18 P 103-1Документ15 страницJgeot 18 P 103-1DebasisMohapatraОценок пока нет
- Uusci 2009 007Документ194 страницыUusci 2009 007DebasisMohapatraОценок пока нет
- GeomeasureДокумент14 страницGeomeasureDebasisMohapatraОценок пока нет
- Nature of Soil-Water Characteristics Curves (SWCC) For Soils From Anbar GovernorateДокумент21 страницаNature of Soil-Water Characteristics Curves (SWCC) For Soils From Anbar GovernorateDebasisMohapatraОценок пока нет
- Figure 2Документ1 страницаFigure 2DebasisMohapatraОценок пока нет
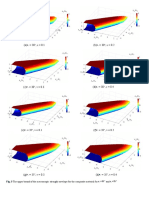
- S C S C: Fig. 5 The Cross-Sectional View of The Macroscopic Strength Envelope For The Composite MaterialДокумент1 страницаS C S C: Fig. 5 The Cross-Sectional View of The Macroscopic Strength Envelope For The Composite MaterialDebasisMohapatraОценок пока нет
- S C S C: Fig. 4 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForДокумент1 страницаS C S C: Fig. 4 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDebasisMohapatraОценок пока нет
- Fig. 1. (A) Initial 3D Problem (B) Homogenized 2D ProblemДокумент1 страницаFig. 1. (A) Initial 3D Problem (B) Homogenized 2D ProblemDebasisMohapatraОценок пока нет
- S C S C: Fig. 3 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForДокумент1 страницаS C S C: Fig. 3 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDebasisMohapatraОценок пока нет
- Soga - Critical StateДокумент13 страницSoga - Critical StateDebasisMohapatraОценок пока нет
- Fig. 1 (A) Initial 3D Problem (B) Homogenized 2D ProblemДокумент1 страницаFig. 1 (A) Initial 3D Problem (B) Homogenized 2D ProblemDebasisMohapatraОценок пока нет
- Ns FEM LIUДокумент14 страницNs FEM LIUDebasisMohapatraОценок пока нет
- Figure 2Документ1 страницаFigure 2DebasisMohapatraОценок пока нет
- Mathematics KeyДокумент353 страницыMathematics KeyDebasisMohapatra100% (3)
- 1 s2.0 S MainДокумент14 страниц1 s2.0 S MainDebasisMohapatraОценок пока нет
- Yu1994 Quadratic Element UpperbndДокумент20 страницYu1994 Quadratic Element UpperbndDebasisMohapatraОценок пока нет
- Computers and Geotechnics: Research PaperДокумент15 страницComputers and Geotechnics: Research PaperDebasisMohapatraОценок пока нет
- Accent Training: - Neutralization - American - British 30 HrsДокумент1 страницаAccent Training: - Neutralization - American - British 30 HrsShah PatelОценок пока нет
- Smoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsДокумент39 страницSmoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDebasisMohapatraОценок пока нет
- Fulltext01 Matlab Code For Elasticity y Plasticity PDFДокумент115 страницFulltext01 Matlab Code For Elasticity y Plasticity PDFRory Cristian Cordero RojoОценок пока нет
- Smoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsДокумент39 страницSmoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDebasisMohapatraОценок пока нет
- MIT Ub SOCPДокумент111 страницMIT Ub SOCPDebasisMohapatraОценок пока нет
- Lower Bound Limit Analysis Using Finite Elements and Linear OptimizationДокумент23 страницыLower Bound Limit Analysis Using Finite Elements and Linear OptimizationDebasisMohapatraОценок пока нет
- 3d Footing UbДокумент13 страниц3d Footing UbDebasisMohapatraОценок пока нет
- Lect2 LPSDP3Документ31 страницаLect2 LPSDP3DebasisMohapatraОценок пока нет
- Earthquake EN PDFДокумент128 страницEarthquake EN PDFDebasisMohapatraОценок пока нет
- Introduction To Mesh in MatlabДокумент18 страницIntroduction To Mesh in MatlablinoОценок пока нет
- CS 213 M: Introduction: Abhiram RanadeДокумент24 страницыCS 213 M: Introduction: Abhiram RanadeTovaОценок пока нет
- International Journal of Children's SpiritualityДокумент15 страницInternational Journal of Children's SpiritualityМаксим КоденевОценок пока нет
- Grammatical Categories of The VerbДокумент26 страницGrammatical Categories of The Verbkopanica80% (5)
- Succession Under Muslim Law 2Документ12 страницSuccession Under Muslim Law 2Z_JahangeerОценок пока нет
- Org Culture by Anand Mohan & Abhishekh K.Документ38 страницOrg Culture by Anand Mohan & Abhishekh K.chintu2789Оценок пока нет
- MetaphysicsДокумент148 страницMetaphysicsMonizaBorges100% (3)
- الترجمة اليوم PDFДокумент155 страницالترجمة اليوم PDFMohammad A YousefОценок пока нет
- Waiting For GodotДокумент9 страницWaiting For GodotKОценок пока нет
- Hetherington, Norriss - Planetary Motions A Historical Perspective (2006)Документ242 страницыHetherington, Norriss - Planetary Motions A Historical Perspective (2006)rambo_style19Оценок пока нет
- Philosophy and LiteratureДокумент292 страницыPhilosophy and LiteratureBarreiro-100% (1)
- Evolution of The KabbalahДокумент58 страницEvolution of The KabbalahJudith Robbins100% (1)
- Miniature Magazine - Issue 1Документ14 страницMiniature Magazine - Issue 1Mini_MagОценок пока нет
- Connotative Vs Denotative Lesson Plan PDFДокумент5 страницConnotative Vs Denotative Lesson Plan PDFangiela goc-ongОценок пока нет
- Aristotle Nicomachean EthicsДокумент10 страницAristotle Nicomachean EthicsCarolineKolopskyОценок пока нет
- Frankenstein Alternative StoryДокумент4 страницыFrankenstein Alternative StoryJorge PaezОценок пока нет
- Organizational Development InterventionsДокумент57 страницOrganizational Development InterventionsAmr YousefОценок пока нет
- Listening Skills: The Process of ListeningДокумент5 страницListening Skills: The Process of ListeningRadhika VekariaОценок пока нет
- Zealot by Reza Aslan, ExcerptДокумент19 страницZealot by Reza Aslan, ExcerptRandom House Publishing Group86% (7)
- EBS The Effects of The Fall of ManДокумент12 страницEBS The Effects of The Fall of ManAlbert A. MaglasangОценок пока нет
- SQ4R StrategyДокумент2 страницыSQ4R StrategyRelu ChiruОценок пока нет
- The Right Way To Manage ExpatsДокумент2 страницыThe Right Way To Manage ExpatsShayne RebelloОценок пока нет
- Quantitative Research Questions & HypothesisДокумент10 страницQuantitative Research Questions & HypothesisAbdul WahabОценок пока нет
- Compensation: Third Canadian Edition Milkovich, Newman, ColeДокумент28 страницCompensation: Third Canadian Edition Milkovich, Newman, ColeNeha AgarwalОценок пока нет
- REFERENCESДокумент3 страницыREFERENCESAnitah GotandabaniОценок пока нет
- Assignment 2research Design2018Документ3 страницыAssignment 2research Design2018artmis94Оценок пока нет
- OPS Solutions ManualДокумент85 страницOPS Solutions ManualAndreza AlvesОценок пока нет
- Plato's Sophist Non-Being and The BeardДокумент15 страницPlato's Sophist Non-Being and The BeardPhilip Reynor Jr.Оценок пока нет
- MuqaddimahДокумент16 страницMuqaddimahartemis Specter0% (1)