Вам также может понравиться
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsОт EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsОценок пока нет
- Ss 3 Mathematics First Term ExamДокумент7 страницSs 3 Mathematics First Term ExamElena SalvatoreОценок пока нет
- Singapore Secondary 1 End Year Examination For MathДокумент10 страницSingapore Secondary 1 End Year Examination For Mathshandlysoo0% (1)
- Kom MCQ With 2 Marks and 16 MarksДокумент20 страницKom MCQ With 2 Marks and 16 MarksMushini Nagabhushan0% (1)
- Math PronunciationДокумент59 страницMath PronunciationPrince Dark0% (1)
- Kinematics of MachineryДокумент20 страницKinematics of Machineryvenkatkavin0% (1)
- Unit-1: Introduction: Question BankДокумент12 страницUnit-1: Introduction: Question BankAmit BharadwajОценок пока нет
- Mechanism WorksheetДокумент8 страницMechanism Worksheetnatnaelzelalem03Оценок пока нет
- Kinematics of MachineryДокумент8 страницKinematics of MachinerySri RОценок пока нет
- Unit Wise 16 Mark QuestionsДокумент29 страницUnit Wise 16 Mark QuestionsPreethi SharmiОценок пока нет
- 2.kinematics of MachineryДокумент14 страниц2.kinematics of MachineryJegan ParamasivamОценок пока нет
- 16 Mark QuestionДокумент6 страниц16 Mark QuestionMECH HODОценок пока нет
- EMG 2208 - Mechanics of Machines - Assignment - MMU Sept 2012Документ4 страницыEMG 2208 - Mechanics of Machines - Assignment - MMU Sept 2012Charles OndiekiОценок пока нет
- Cms College of Engineering, Namakkal: Unit 1 - Basics of MechanismsДокумент17 страницCms College of Engineering, Namakkal: Unit 1 - Basics of MechanismsRajueswarОценок пока нет
- Kinematics of MachinesДокумент2 страницыKinematics of Machinessameer_m_daniОценок пока нет
- 9A03401 Kinematics of MachineryДокумент8 страниц9A03401 Kinematics of MachinerysivabharathamurthyОценок пока нет
- Tutorial PlanДокумент23 страницыTutorial PlanPraveen KumarОценок пока нет
- Me1252 Kinematics of MachineryДокумент3 страницыMe1252 Kinematics of MachineryManikandan SelvamОценок пока нет
- TOM Question BankДокумент10 страницTOM Question BankMadhan Kumar GovindarajuОценок пока нет
- Kinematics of Machinary April 2021Документ2 страницыKinematics of Machinary April 2021mighty statusОценок пока нет
- Assignment - 1 Introduction of Machines and Mechanisms: TheoryДокумент23 страницыAssignment - 1 Introduction of Machines and Mechanisms: TheoryAman AmanОценок пока нет
- Mechanisms and Mechanical DesignДокумент9 страницMechanisms and Mechanical DesignNizam Institute of Engineering and Technology LibraryОценок пока нет
- 9A14402 Theory of MachinesДокумент8 страниц9A14402 Theory of MachinessivabharathamurthyОценок пока нет
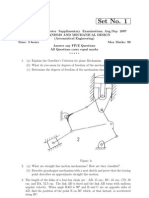
- ME2203 M.J 2007Документ0 страницME2203 M.J 2007Venkatesh RajamaniОценок пока нет
- Kinematics of Machinery Question BankДокумент7 страницKinematics of Machinery Question BankpanneerthambiОценок пока нет
- Kinematics of MachinesДокумент2 страницыKinematics of Machinessameer_m_daniОценок пока нет
- KomДокумент12 страницKomSasi KumarОценок пока нет
- ME203 MOM July16 IC&Acceleration Tutorial 02Документ3 страницыME203 MOM July16 IC&Acceleration Tutorial 02Pradyumna KSОценок пока нет
- Question Bank KOMДокумент3 страницыQuestion Bank KOMMudit MaheshwariОценок пока нет
- Kinematics of MachinesДокумент3 страницыKinematics of Machinessameer_m_daniОценок пока нет
- 1424R05310304 Kinematics of MacДокумент10 страниц1424R05310304 Kinematics of Macأحمد جمالОценок пока нет
- Kinematics of Machines - AssignmentДокумент21 страницаKinematics of Machines - AssignmentAmit BharadwajОценок пока нет
- Kinematics of Machinery May2004 Rr222105 Nr220304Документ9 страницKinematics of Machinery May2004 Rr222105 Nr220304Nizam Institute of Engineering and Technology LibraryОценок пока нет
- B.Tech (PT) - Mechanical - II YEAR - III SEM - (R) 2012 PDFДокумент12 страницB.Tech (PT) - Mechanical - II YEAR - III SEM - (R) 2012 PDFmohamed irshadОценок пока нет
- 06me44 Dec 13 VTUДокумент2 страницы06me44 Dec 13 VTUArun DixitОценок пока нет
- Assignment 1Документ2 страницыAssignment 1Kamalesh DfcОценок пока нет
- 9A14402 Theory of MachinesДокумент8 страниц9A14402 Theory of MachinessivabharathamurthyОценок пока нет
- Upto 2010 KomДокумент36 страницUpto 2010 KompsnasabariОценок пока нет
- 133BB112017Документ3 страницы133BB112017prempragupta123Оценок пока нет
- Upto 2010 KomДокумент36 страницUpto 2010 KomRajueswarОценок пока нет
- Chapter 3 Acceleration AnalysisДокумент4 страницыChapter 3 Acceleration Analysisameet_sata20000% (1)
- 9A03401 Kinematics of MachineryДокумент8 страниц9A03401 Kinematics of MachinerysivabharathamurthyОценок пока нет
- Assignment Unit - 1: 2) .A Pair of Involute Gears Is in Mesh. The Application Restricts The Space To Accommodate TheseДокумент4 страницыAssignment Unit - 1: 2) .A Pair of Involute Gears Is in Mesh. The Application Restricts The Space To Accommodate TheserahulОценок пока нет
- r05310304 Kinematics of MachineryДокумент10 страницr05310304 Kinematics of MachinerySRINIVASA RAO GANTAОценок пока нет
- WWW - Manaresults.co - In: II B. Tech II Semester Regular/Supplementary Examinations, November - 2020 Kinematics of MachinaryДокумент2 страницыWWW - Manaresults.co - In: II B. Tech II Semester Regular/Supplementary Examinations, November - 2020 Kinematics of MachinaryPavaniОценок пока нет
- NR 220304 Kinematics of MachineryДокумент11 страницNR 220304 Kinematics of MachinerySrinivasa Rao GОценок пока нет
- 2010 - May - June-06ME44Документ2 страницы2010 - May - June-06ME44nitte5768Оценок пока нет
- Kinematics of Machinary Nov 2020Документ2 страницыKinematics of Machinary Nov 2020mighty statusОценок пока нет
- Assignment IДокумент3 страницыAssignment IJET JETОценок пока нет
- R7220302 Kinematics of MachineryДокумент2 страницыR7220302 Kinematics of MachinerysivabharathamurthyОценок пока нет
- Kinematics of Machinery Question BankДокумент5 страницKinematics of Machinery Question BankSree MurthyОценок пока нет
- Gujarat Technological UniversityДокумент3 страницыGujarat Technological UniversityKrinal AdakiОценок пока нет
- Question Bank KomДокумент11 страницQuestion Bank KomStar SathishОценок пока нет
- Rr222105 Kinematics of MachineryДокумент11 страницRr222105 Kinematics of MachinerySrinivasa Rao G100% (2)
- Kinematics of Machinery Anna University Question Papers CompiledДокумент77 страницKinematics of Machinery Anna University Question Papers CompiledNatesha SundharanОценок пока нет
- Midsem Question Paper 2015Документ1 страницаMidsem Question Paper 2015shashankmay18Оценок пока нет
- Theory of Machines-I - 012110043744 - 1Документ17 страницTheory of Machines-I - 012110043744 - 1alisha_4911Оценок пока нет
- 10ME/AU44: at Least TWO Questions From Each PartДокумент2 страницы10ME/AU44: at Least TWO Questions From Each PartsatheeshОценок пока нет
- Planar Linkage Synthesis: A modern CAD based approachОт EverandPlanar Linkage Synthesis: A modern CAD based approachОценок пока нет
- Imo Class 5 Chapterwise PapersДокумент20 страницImo Class 5 Chapterwise PapersBhishma PandyaОценок пока нет
- Math WHLP q2 SteДокумент11 страницMath WHLP q2 Stekero roy tadeoОценок пока нет
- Sample Problem Plane Analytic GeometryДокумент1 страницаSample Problem Plane Analytic GeometryMJ Dela CruzОценок пока нет
- Splitup Syllabus - Semester - IДокумент3 страницыSplitup Syllabus - Semester - IDijesh Punathil100% (3)
- Generalized Ptolemy's Theorem - 2019Документ6 страницGeneralized Ptolemy's Theorem - 2019arun rajaramОценок пока нет
- Concepts and Results in Chaotic Dynamics, A Short Course (Theoretical and Mathematical Physics) (Pierre Collet, Jean Pierre Eckmann) 3540347054Документ236 страницConcepts and Results in Chaotic Dynamics, A Short Course (Theoretical and Mathematical Physics) (Pierre Collet, Jean Pierre Eckmann) 3540347054Bartolome Antonio PereiraОценок пока нет
- Education Bureau Territory-Wide System Assessment 2019 Secondary 3 Mathematics Question BookletДокумент20 страницEducation Bureau Territory-Wide System Assessment 2019 Secondary 3 Mathematics Question BookletJake WongОценок пока нет
- (Donald T. Greenwood) Principles of Dynamics Chap2Документ37 страниц(Donald T. Greenwood) Principles of Dynamics Chap2GracielaОценок пока нет
- Exercise 6.3 Total Surface Area: Measurement and GeometryДокумент5 страницExercise 6.3 Total Surface Area: Measurement and GeometryDulip HerathОценок пока нет
- 8101-01-07 Constructions - Student Guide Part 2Документ4 страницы8101-01-07 Constructions - Student Guide Part 2Jonathan AllmanОценок пока нет
- Lecture #5: The Borel Sets of RДокумент3 страницыLecture #5: The Borel Sets of RVivemos FutebolОценок пока нет
- Periodicity and ExtremevaluesДокумент5 страницPeriodicity and ExtremevaluesHemanth JОценок пока нет
- Maths Test PaperДокумент1 страницаMaths Test PaperRaju KumarОценок пока нет
- Minnesota State High School Mathematics League State Tournament Sample QuestionsДокумент17 страницMinnesota State High School Mathematics League State Tournament Sample QuestionsMinnesota Public Radio100% (1)
- 1001bit Pro2 User GuideДокумент103 страницы1001bit Pro2 User GuidesidiqОценок пока нет
- Sec 1 Math North Vista Sec SA2 2018iДокумент33 страницыSec 1 Math North Vista Sec SA2 2018iR LeeОценок пока нет
- MultipatronДокумент2 страницыMultipatronjose2703Оценок пока нет
- Chapter 2. Differentiation: Vietnam National University - Hochiminh City International UniversityДокумент78 страницChapter 2. Differentiation: Vietnam National University - Hochiminh City International UniversityKensleyTsangОценок пока нет
- GDT Psychology-Analysis Worksheet All ExamplesДокумент12 страницGDT Psychology-Analysis Worksheet All ExamplesDiya BajajОценок пока нет
- SVKM MD&CG SyllabusДокумент2 страницыSVKM MD&CG SyllabusmitmandsaurОценок пока нет
- Constructing Triangles PPPДокумент9 страницConstructing Triangles PPPZuri Novelo100% (1)
- SURVEYING MCQДокумент21 страницаSURVEYING MCQswaparnikaОценок пока нет
- 2016 AJC H2 JC2 Prelim Paper 1 (Questions)Документ5 страниц2016 AJC H2 JC2 Prelim Paper 1 (Questions)VarshLokОценок пока нет
- Perimeter and Area Formulas For Two Dimensional Geometrical FiguresДокумент4 страницыPerimeter and Area Formulas For Two Dimensional Geometrical Figuresmj03127477706Оценок пока нет
- ME 16 - Introduction + Fundamentals + Forces (Up To Scalar Rectangular Components) 2 PDFДокумент25 страницME 16 - Introduction + Fundamentals + Forces (Up To Scalar Rectangular Components) 2 PDFAshley Young100% (2)
- Modern Structural Practice: A Structural Geology Laboratory Manual For The 21 CenturyДокумент339 страницModern Structural Practice: A Structural Geology Laboratory Manual For The 21 CenturyColleen CallahanОценок пока нет
- Dimensioning RulesДокумент4 страницыDimensioning RulesJhenny MTОценок пока нет