Вам также может понравиться
- Railroad: RailroadcrossingДокумент4 страницыRailroad: RailroadcrossingSyarif AlОценок пока нет
- Batam (SEKUPANG)Документ6 страницBatam (SEKUPANG)Syarif AlОценок пока нет
- The Adventure of The Six Napoleons: Arthur Conan DoyleДокумент12 страницThe Adventure of The Six Napoleons: Arthur Conan DoyleSyarif AlОценок пока нет
- Seismic Analyses of Long-Span Cable-Stayed Bridges Subjected To Near-Fault Pulse-Type Ground MotionsДокумент8 страницSeismic Analyses of Long-Span Cable-Stayed Bridges Subjected To Near-Fault Pulse-Type Ground MotionsSyarif AlОценок пока нет
- Effect of Cable Degradation On Dynamic Behavior of Cable Stayed BridgesДокумент11 страницEffect of Cable Degradation On Dynamic Behavior of Cable Stayed BridgesSyarif AlОценок пока нет
- Analisa Pendayagunaan Sumberdaya Air Pada Ws Paguyaman Dengan Ribasim - Bambang Yulistiyanto Dan Ba KironotoДокумент12 страницAnalisa Pendayagunaan Sumberdaya Air Pada Ws Paguyaman Dengan Ribasim - Bambang Yulistiyanto Dan Ba KironotoNugroho Eko PrasetyoОценок пока нет
- Cikatomas (Table)Документ8 страницCikatomas (Table)Syarif AlОценок пока нет
- TierodДокумент6 страницTierodSyarif AlОценок пока нет
- Wide FlangeДокумент2 страницыWide FlangeSyarif AlОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Central Tendency Module - 10Документ64 страницыCentral Tendency Module - 10rueljp5thОценок пока нет
- J.P. Rizal Ext. West Rembo, Makati CityДокумент2 страницыJ.P. Rizal Ext. West Rembo, Makati CityQ Annang TomanggongОценок пока нет
- Applications and Use of Laplace Transform in The Field of EngineeringДокумент14 страницApplications and Use of Laplace Transform in The Field of EngineeringJeo CandilОценок пока нет
- A Beginner SpreadsheetДокумент13 страницA Beginner SpreadsheetAldrin Marquez DyОценок пока нет
- Optimal Re-Entry Guidance of Space Vehicles Under Control and State Variable Inequality ConstraintsДокумент11 страницOptimal Re-Entry Guidance of Space Vehicles Under Control and State Variable Inequality ConstraintssssdaitОценок пока нет
- 1.area of Triangles and QuadrilateralsДокумент7 страниц1.area of Triangles and QuadrilateralsVic Gabriel Nercuit GurreaОценок пока нет
- Ebook College Algebra in Context 5Th Edition Harshbarger Solutions Manual Full Chapter PDFДокумент68 страницEbook College Algebra in Context 5Th Edition Harshbarger Solutions Manual Full Chapter PDFsorrancemaneuverpmvll100% (11)
- K MapДокумент9 страницK MapKamal PhyОценок пока нет
- Boundary-Value Problems 6.4 The Alternating Direction Implicit (ADI) MethodДокумент4 страницыBoundary-Value Problems 6.4 The Alternating Direction Implicit (ADI) MethodratnacfdОценок пока нет
- Numerical - SplinesДокумент9 страницNumerical - SplinesmalansariОценок пока нет
- Source Code 1Документ40 страницSource Code 1dinesh181899Оценок пока нет
- FDSFSDДокумент6 страницFDSFSDPotatoОценок пока нет
- List of Mathematical Series - Wikipedia, The Free EncyclopediaДокумент8 страницList of Mathematical Series - Wikipedia, The Free EncyclopediapummykidОценок пока нет
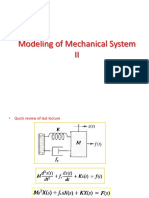
- Modeling of Mechanical System IIДокумент11 страницModeling of Mechanical System IIshrey saxenaОценок пока нет
- 3rd Grade Number WorksheetДокумент35 страниц3rd Grade Number WorksheetNel Retana SorapacОценок пока нет
- Dynamic Games - Theory and Applications PDFДокумент279 страницDynamic Games - Theory and Applications PDFHelton OliveiraОценок пока нет
- Detailed Lesson PlanДокумент10 страницDetailed Lesson PlanJeffreynald Arante Francisco83% (23)
- Topic5 Linear TransformationsДокумент25 страницTopic5 Linear TransformationsFilipus Boby Setiawan BudimanОценок пока нет
- 0606 s14 QP 13Документ16 страниц0606 s14 QP 13AKRAMОценок пока нет
- Pre - Calculus 11 Diagnostic Test SY 2021-2022Документ2 страницыPre - Calculus 11 Diagnostic Test SY 2021-2022Rachelle Monn OcsioОценок пока нет
- Tolerance, Fits & AssemblyДокумент26 страницTolerance, Fits & AssemblyNguyenThiKhanhLy100% (1)
- 5MB2H - 01 - Que - 20160609 2016Документ16 страниц5MB2H - 01 - Que - 20160609 2016Papara OanaОценок пока нет
- Final Exam ReviewДокумент54 страницыFinal Exam ReviewThanh Nhàn50% (2)
- Study of Fuzzy Measure and Some Properties of Null-Additive Fuzzy MeasureДокумент7 страницStudy of Fuzzy Measure and Some Properties of Null-Additive Fuzzy MeasureAshutoshSharmaОценок пока нет
- IGCSE Math Revision PlanДокумент3 страницыIGCSE Math Revision PlanBảo Đỗ DuyОценок пока нет
- ITE3711 Lecture1.3 Operators 20230906Документ18 страницITE3711 Lecture1.3 Operators 20230906zainoff445Оценок пока нет
- Lesson 1: MEASUREMENTДокумент10 страницLesson 1: MEASUREMENTNicole Sta TeresaОценок пока нет
- Numerical Methods Lecture # 2Документ17 страницNumerical Methods Lecture # 2Khalid PervaizОценок пока нет
- Simpson's Integration RuleДокумент2 страницыSimpson's Integration RulerodwellheadОценок пока нет
- (Unit-04) Part-01 - ML AlgoДокумент49 страниц(Unit-04) Part-01 - ML Algosuma varanasiОценок пока нет