Вам также может понравиться
- The First Hybrid CRP-POD Driven Fast ROPAX Ferry (Paper)Документ5 страницThe First Hybrid CRP-POD Driven Fast ROPAX Ferry (Paper)pal_malayОценок пока нет
- c1 PDFДокумент43 страницыc1 PDFMadhushan DassanayakeОценок пока нет
- Survey of Naval Surface Ship Propulsion and Auxiliary System DevelopmentsДокумент90 страницSurvey of Naval Surface Ship Propulsion and Auxiliary System DevelopmentsAn NgocSonОценок пока нет
- Dynamic Energy Modeling - A New Approach To Energy Efficiency and Cost Effectiveness in Shipping OperationsДокумент11 страницDynamic Energy Modeling - A New Approach To Energy Efficiency and Cost Effectiveness in Shipping OperationsDimitriosSfakianakisОценок пока нет
- Ship Energy Saving DeviceДокумент43 страницыShip Energy Saving DeviceMax VerardiОценок пока нет
- Prius Gen IV 1.8L SimulationДокумент14 страницPrius Gen IV 1.8L SimulationseyyidMubeenОценок пока нет
- GateRudder JMST 2015 PDFДокумент13 страницGateRudder JMST 2015 PDFθανασης ΓκιοκαςОценок пока нет
- Microgrid Modelling Simulation PDFДокумент81 страницаMicrogrid Modelling Simulation PDFVitor Seger ZeniОценок пока нет
- Zonal Ship Design (Paper)Документ16 страницZonal Ship Design (Paper)pal_malayОценок пока нет
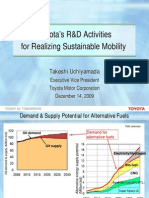
- Toyota's R&D Activities For Realizing Sustainable MobilityДокумент17 страницToyota's R&D Activities For Realizing Sustainable MobilitysamabuelsamidОценок пока нет
- Hydrogen As The Key For Emission-Free Rail Transport - Opportunities and ChallengesДокумент17 страницHydrogen As The Key For Emission-Free Rail Transport - Opportunities and Challengesshruti kapseОценок пока нет
- Models For Insulation Aging Under Electrical and Thermal MultistressДокумент12 страницModels For Insulation Aging Under Electrical and Thermal MultistressRogelio RevettiОценок пока нет
- Saving Energy Using FlywheelsДокумент8 страницSaving Energy Using FlywheelsRestu AbdulОценок пока нет
- Hybrid Tug Foss 2012Документ50 страницHybrid Tug Foss 2012Maurizio BernasconiОценок пока нет
- Steerable Propulsion Units Hydrodynamic Issues andДокумент16 страницSteerable Propulsion Units Hydrodynamic Issues andMaciej ReichelОценок пока нет
- Symbolic Logic An IntroductionДокумент138 страницSymbolic Logic An IntroductionDayton MОценок пока нет
- Animal Shelters PaperДокумент15 страницAnimal Shelters Paperapi-303073216Оценок пока нет
- A Review On The Faults of Electric MachiДокумент8 страницA Review On The Faults of Electric Machifares noureddineОценок пока нет
- The Load As An Energy Asset in A Distributed DC MGДокумент8 страницThe Load As An Energy Asset in A Distributed DC MGAakanksha DugarОценок пока нет
- Hydrogen Peroxide: / Hydrogen Dioxide H OДокумент41 страницаHydrogen Peroxide: / Hydrogen Dioxide H OJames WilliamsОценок пока нет
- Ship Electrical Load and Power Generation OptimizationДокумент7 страницShip Electrical Load and Power Generation OptimizationmahmudОценок пока нет
- Methane Hydrate - The World's Largest Natural Gas ResourceДокумент5 страницMethane Hydrate - The World's Largest Natural Gas ResourceThePomboОценок пока нет
- Profiles in Public Integrity - Heather HoltДокумент2 страницыProfiles in Public Integrity - Heather HoltCenter for the Advancement of Public IntegrityОценок пока нет
- 13326 - Electrónica de Potencia (Diplomado Máquinas NavalesДокумент20 страниц13326 - Electrónica de Potencia (Diplomado Máquinas NavalesSergey MikhailovОценок пока нет
- Evaluation of Different Turbine Concepts For Wind Power 2Документ16 страницEvaluation of Different Turbine Concepts For Wind Power 2fmatjazОценок пока нет
- Modelling System Reliability Using Continuous-Time Markov ChainДокумент4 страницыModelling System Reliability Using Continuous-Time Markov ChainjoyopsonОценок пока нет
- ABS Guide For Ballast Water Treatment: Bill LindДокумент13 страницABS Guide For Ballast Water Treatment: Bill LindjerylsОценок пока нет
- List of Thermal Conductivities - Wikipedia, The Free EncyclopediaДокумент9 страницList of Thermal Conductivities - Wikipedia, The Free EncyclopediaPragasti Nilam SariОценок пока нет
- Hybrid Gas Turbine Fuel Cell SystemsДокумент37 страницHybrid Gas Turbine Fuel Cell SystemsRene Gonzalez100% (1)
- Khun Klang PDFДокумент36 страницKhun Klang PDFKang K. KrahermharnОценок пока нет
- OE Spec MTU16V4000DS2250 3F FC 50Hz 1 14Документ6 страницOE Spec MTU16V4000DS2250 3F FC 50Hz 1 14YasirSwatiОценок пока нет
- Professional Integrity and Disobedience in The Military PDFДокумент15 страницProfessional Integrity and Disobedience in The Military PDFLeo BiadnesОценок пока нет
- Vibration Testing Theory and PracticeДокумент31 страницаVibration Testing Theory and PracticeDilara Çınarel0% (3)
- Contra Rotating PropellersДокумент27 страницContra Rotating PropellersTapan Khandelwal100% (1)
- AS Set Based DesignДокумент150 страницAS Set Based DesignAnonymous yRV1y8KLsОценок пока нет
- FARS Running Financial Reports and StatisticsДокумент5 страницFARS Running Financial Reports and StatisticsKristen FahyОценок пока нет
- Trends in the Tug Market: Fleet Sizes and Prices on the RiseДокумент20 страницTrends in the Tug Market: Fleet Sizes and Prices on the Risemecubill100% (1)
- RAS UK StrategyДокумент23 страницыRAS UK StrategyCezar-Victor NăstaseОценок пока нет
- 2004.12 Mitsubishi (MHI) Stator-Fin Ship Energy Saving Device DesignДокумент4 страницы2004.12 Mitsubishi (MHI) Stator-Fin Ship Energy Saving Device Designgnd100Оценок пока нет
- Battery ComparisonДокумент7 страницBattery Comparisoninterpon07Оценок пока нет
- A Flywheel Is A Rotating Mechanical Device That Is Used To Store Rotational EnergyДокумент11 страницA Flywheel Is A Rotating Mechanical Device That Is Used To Store Rotational EnergyNigussie AdemОценок пока нет
- Richmond-Steveston Dike Master Plan PDFДокумент25 страницRichmond-Steveston Dike Master Plan PDFMartinvdHОценок пока нет
- Ship Efficiency Review - Issue 10Документ60 страницShip Efficiency Review - Issue 10Jum Aswiny Nat100% (1)
- Ocean Thermal Energy ConversionДокумент17 страницOcean Thermal Energy ConversionVamsi Pelluru100% (1)
- Modelling of LithiumДокумент18 страницModelling of LithiumSaumya SinhaОценок пока нет
- The Case For The Diesel EngineДокумент26 страницThe Case For The Diesel EngineChangsun HwangОценок пока нет
- Hanninen 2008 Analysis PDFДокумент55 страницHanninen 2008 Analysis PDFMatej Marko PetkovićОценок пока нет
- Me 2403 Power Plant Engineering - Lecture NotesДокумент98 страницMe 2403 Power Plant Engineering - Lecture NotesBIBIN CHIDAMBARANATHAN100% (1)
- Alwadi International School Accounting Grade 12 Notes: Companies - Business PurchaseДокумент23 страницыAlwadi International School Accounting Grade 12 Notes: Companies - Business PurchaseFarrukhsgОценок пока нет
- ROV - Millennium PlusДокумент2 страницыROV - Millennium Plusroger1231175Оценок пока нет
- Studies of MHD PropulsionДокумент127 страницStudies of MHD PropulsionAnghel Andrei Cristian100% (1)
- Why Wind Wont Work PDFДокумент30 страницWhy Wind Wont Work PDFDennis AlbertОценок пока нет
- 3.5FUEL CELL COGENERATION SYSTEMS: Basic Principles and Types of Fuel CellsДокумент6 страниц3.5FUEL CELL COGENERATION SYSTEMS: Basic Principles and Types of Fuel Cellsrp0212Оценок пока нет
- Wind Power: What Is It? How Does It Work? Efficiency U.S. Stats and ExamplesДокумент23 страницыWind Power: What Is It? How Does It Work? Efficiency U.S. Stats and ExamplesLalit SharmaОценок пока нет
- 43 Battery Storage Companies To Watch - CleanTechnicaДокумент11 страниц43 Battery Storage Companies To Watch - CleanTechnicaDeepak GehlotОценок пока нет
- An Investigation of The Effects of Wind-Induced Inclination On Floating Wind Turbine Dynamics - Heave Plate ExcursionДокумент10 страницAn Investigation of The Effects of Wind-Induced Inclination On Floating Wind Turbine Dynamics - Heave Plate ExcursionCarlos GarridoОценок пока нет
- MTU市场经验Документ18 страницMTU市场经验guichen wangОценок пока нет
- Pac12 JB SM Paper 25-Nov-11Документ11 страницPac12 JB SM Paper 25-Nov-11BuckinghamsterОценок пока нет
- Wartsila SP A Id TugДокумент7 страницWartsila SP A Id TugRoy ChaiОценок пока нет
- Pounder's Marine Diesel Engines and Gas TurbinesОт EverandPounder's Marine Diesel Engines and Gas TurbinesРейтинг: 4 из 5 звезд4/5 (15)
- Texte 65 2915 Impacts of Scubbers On The Envoronmental Situation in Ports and Coastal WatersДокумент88 страницTexte 65 2915 Impacts of Scubbers On The Envoronmental Situation in Ports and Coastal WatersYao WeiОценок пока нет
- Green Retrofit Guide - v2 PDFДокумент21 страницаGreen Retrofit Guide - v2 PDFYao WeiОценок пока нет
- Shipping Efficiency Finance Report - Hidden Treasure - Financial Models For Retrofit - 2014 PDFДокумент52 страницыShipping Efficiency Finance Report - Hidden Treasure - Financial Models For Retrofit - 2014 PDFYao WeiОценок пока нет
- Clean Marine Presentation To Intertanko - Ma 2014Документ45 страницClean Marine Presentation To Intertanko - Ma 2014Yao WeiОценок пока нет
- Development and Installation of Marine-Use Hybrid SOx Scrubber System That Complies With IMO SOx Emission Regulations - 201606Документ5 страницDevelopment and Installation of Marine-Use Hybrid SOx Scrubber System That Complies With IMO SOx Emission Regulations - 201606Yao WeiОценок пока нет
- Scrubber Guide Sample Pages PDFДокумент31 страницаScrubber Guide Sample Pages PDFYao WeiОценок пока нет
- Exhaust Gas Cleaning Systems Selection Guide - US Dept. of Transport - 2011Документ155 страницExhaust Gas Cleaning Systems Selection Guide - US Dept. of Transport - 2011Yao WeiОценок пока нет
- Gfps 6470 Brochure Exhaust Gas Scrubber enДокумент12 страницGfps 6470 Brochure Exhaust Gas Scrubber enYao WeiОценок пока нет
- 2016.02 White Paper ScrubbersДокумент2 страницы2016.02 White Paper ScrubbersYao WeiОценок пока нет
- Green Retrofit Guide v2 GoltonДокумент21 страницаGreen Retrofit Guide v2 GoltonYao WeiОценок пока нет
- On Board Measurements of Scrubberperformance On VesselsДокумент19 страницOn Board Measurements of Scrubberperformance On VesselsYao WeiОценок пока нет
- EGCSA Handbook 2012 - A Practical Guide To Exhaust Gas Cleaning Systems For The Maritime IndustryДокумент82 страницыEGCSA Handbook 2012 - A Practical Guide To Exhaust Gas Cleaning Systems For The Maritime IndustryYao WeiОценок пока нет
- Exhaust Gas Scrubber Installed Onboard MV Ficaria Seaways - 2012Документ31 страницаExhaust Gas Scrubber Installed Onboard MV Ficaria Seaways - 2012Yao WeiОценок пока нет
- Meson Scrubber Valves OptДокумент2 страницыMeson Scrubber Valves OptYao WeiОценок пока нет
- Exhausts Scrubbers BV 2014Документ7 страницExhausts Scrubbers BV 2014Yao WeiОценок пока нет
- Validation of The Strip Theory Code SEAWAY by Model Tests in Very Shallow Water PDFДокумент21 страницаValidation of The Strip Theory Code SEAWAY by Model Tests in Very Shallow Water PDFYao WeiОценок пока нет
- Green Ships and Green Growth Assessment of Selected Policies Promoting The Construction and Operation of Greener Vessels - 20171120Документ29 страницGreen Ships and Green Growth Assessment of Selected Policies Promoting The Construction and Operation of Greener Vessels - 20171120Yao WeiОценок пока нет
- Assessment of Possible Impacts of Scrubber Water Discharge On Marine Enviroment - Danish - 2012Документ93 страницыAssessment of Possible Impacts of Scrubber Water Discharge On Marine Enviroment - Danish - 2012Yao WeiОценок пока нет
- Manuale Oni 208Документ18 страницManuale Oni 208magn357Оценок пока нет
- Glifford Power Exhaust LayoutДокумент2 страницыGlifford Power Exhaust LayoutYao WeiОценок пока нет
- Volvo Allowable Back PressureДокумент1 страницаVolvo Allowable Back PressureYao WeiОценок пока нет
- Analysis of Transport Barge Nonlinear Roll Motions in A Seaway Using An Equivalent Linearization Procedure PDFДокумент8 страницAnalysis of Transport Barge Nonlinear Roll Motions in A Seaway Using An Equivalent Linearization Procedure PDFYao WeiОценок пока нет
- Stationary and Non-Stationary Open Water Rudder Tests PDFДокумент9 страницStationary and Non-Stationary Open Water Rudder Tests PDFYao WeiОценок пока нет
- Intergranular Corrosion of 316LN Stainless Steel Welded JointsДокумент8 страницIntergranular Corrosion of 316LN Stainless Steel Welded JointsYao WeiОценок пока нет
- WP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012Документ52 страницыWP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012jimmyy90Оценок пока нет
- Investigation of Which Sea State Yield The Dominating Contribution To Fatigue Accumulation in Offshore Structures PDFДокумент152 страницыInvestigation of Which Sea State Yield The Dominating Contribution To Fatigue Accumulation in Offshore Structures PDFYao WeiОценок пока нет
- Investigation of Response Amplitude Operators For Floating Offshore Wind Turbines PDFДокумент1 страницаInvestigation of Response Amplitude Operators For Floating Offshore Wind Turbines PDFYao WeiОценок пока нет
- The International Oil Pollution Compensation Funds PDFДокумент125 страницThe International Oil Pollution Compensation Funds PDFYao WeiОценок пока нет
- Evaluation of Seakeeping Analysis of A Fishing Vessel UsingДокумент13 страницEvaluation of Seakeeping Analysis of A Fishing Vessel UsingEdwin RadhityaОценок пока нет
- The Ship's Electrical Network, Engine Control and AutomationДокумент6 страницThe Ship's Electrical Network, Engine Control and AutomationJohn SmithОценок пока нет
- Reeds Vol. 12 Motor Engineering Knowledge For Marine EngineersДокумент385 страницReeds Vol. 12 Motor Engineering Knowledge For Marine Engineershzhchina168Оценок пока нет
- VHP Engine Datasheet 7044Документ2 страницыVHP Engine Datasheet 7044RafaqatAliОценок пока нет
- VHP Series Five P9394Gsi S5: With Esm2 and Empact Emission Control SystemДокумент2 страницыVHP Series Five P9394Gsi S5: With Esm2 and Empact Emission Control SystemGabrielito PachacamaОценок пока нет
- Full Line Up PDFДокумент14 страницFull Line Up PDFeldiego1790Оценок пока нет
- EKM Class II QBankДокумент26 страницEKM Class II QBankRutvikОценок пока нет
- Draft A Review of Water Injection Applied On The Internal Combustion Engine-56-85Документ30 страницDraft A Review of Water Injection Applied On The Internal Combustion Engine-56-85galin8575Оценок пока нет
- Split Cycle EnginesДокумент28 страницSplit Cycle Enginesthy7rexОценок пока нет
- Air Standard Cycles - BasicsДокумент34 страницыAir Standard Cycles - Basicsrazvan66m100% (1)
- Miller CycleДокумент17 страницMiller CycleBoni SenaОценок пока нет
- Series 1163 TB73-TB93LДокумент72 страницыSeries 1163 TB73-TB93LDimas SaputroОценок пока нет
- 51-60df Imo Tier II - MarineДокумент572 страницы51-60df Imo Tier II - MarineAnonymous 0irJN2UI50% (2)
- Development of A Small 4-Stroke EPI-Cycloid Miller Cycle EngineДокумент16 страницDevelopment of A Small 4-Stroke EPI-Cycloid Miller Cycle EngineHenrique costa melloОценок пока нет
- 6EY22 Marine Auxiliairy Diesel EngineДокумент28 страниц6EY22 Marine Auxiliairy Diesel EngineRifkiHabibi100% (1)
- CimacДокумент78 страницCimactieideОценок пока нет
- Addis Ababa University Internal Combustion Engine ChapterДокумент2 страницыAddis Ababa University Internal Combustion Engine ChapterMc AxОценок пока нет
- Gaswaermepumpen KatalogДокумент84 страницыGaswaermepumpen KatalogDiogo MatiasОценок пока нет
- Recent Trends in IC EngineДокумент15 страницRecent Trends in IC EnginePawan Pithadiya100% (1)
- EGR Vs (1) - ACERT Comp AnalysisДокумент21 страницаEGR Vs (1) - ACERT Comp Analysisalexander100% (2)
- Miller Cycle Engine ExplainedДокумент2 страницыMiller Cycle Engine Explaineddzh513Оценок пока нет
- MTU Technical Article Further Development Series 1163 For IMO IIДокумент4 страницыMTU Technical Article Further Development Series 1163 For IMO IIDeepak Chachra100% (2)
- Module 2 TechnologyДокумент20 страницModule 2 Technologybenitez1Оценок пока нет
- We Power The World With Innovative Gas Engines: Siemens Gas Engine PortfolioДокумент19 страницWe Power The World With Innovative Gas Engines: Siemens Gas Engine PortfoliokhuzaimОценок пока нет
- Guascor Gasengines Overview 2023Документ38 страницGuascor Gasengines Overview 2023Muhammad Syaqirin100% (1)
- Mazda USДокумент12 страницMazda USVarun R SaksenaОценок пока нет
- Manual EA888 GEN 3 MotorДокумент34 страницыManual EA888 GEN 3 Motordinho mx13100% (2)
- Scania's New V8 Engines Deliver Major Fuel SavingsДокумент6 страницScania's New V8 Engines Deliver Major Fuel SavingsPraveen SreedharanОценок пока нет
- Energy Conversion and Heat EnginesДокумент17 страницEnergy Conversion and Heat EnginesHarsa RizanoОценок пока нет
- Product Bulletin VHP7104GSI S5Документ2 страницыProduct Bulletin VHP7104GSI S5Wiliam SeguraОценок пока нет
- Effect of Turbo Charging, Steam Injection and Miller Cycle on Diesel Engine PerformanceДокумент38 страницEffect of Turbo Charging, Steam Injection and Miller Cycle on Diesel Engine Performancezulfikar100% (1)