Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Acoustics SANS StandardsДокумент174 страницыAcoustics SANS Standardsanton778671% (7)
- Millport Coastal Flood Protection Scheme: Environmental StatementДокумент49 страницMillport Coastal Flood Protection Scheme: Environmental StatementCory WashingtonОценок пока нет
- Classical and Neoclassical ApproachesДокумент5 страницClassical and Neoclassical Approachesromwama100% (3)
- BS 4196-1-ISO 3741-1988-Sound Power Levels of Noise SourcesДокумент24 страницыBS 4196-1-ISO 3741-1988-Sound Power Levels of Noise SourcesSimoncarter Law100% (2)
- Acoustic MeasurementsДокумент14 страницAcoustic MeasurementsShivjyoti MohapatraОценок пока нет
- Audiometric Calibration: Air Conduction: Seminars in Hearing October 2014Документ18 страницAudiometric Calibration: Air Conduction: Seminars in Hearing October 2014ashaОценок пока нет
- ILO Noise and VibrationДокумент100 страницILO Noise and VibrationAldrinОценок пока нет
- A9131o14d 1a40mgy Ato - TMP Part7Документ1 страницаA9131o14d 1a40mgy Ato - TMP Part7romwamaОценок пока нет
- A9131o14d 1a40mgy Ato - TMP Part6Документ1 страницаA9131o14d 1a40mgy Ato - TMP Part6romwamaОценок пока нет
- A9131o14d 1a40mgy Ato - TMP Part5Документ1 страницаA9131o14d 1a40mgy Ato - TMP Part5romwamaОценок пока нет
- Transmi Ssi Onchai Ns Chai NDR I Vesandtypesofchai NsДокумент7 страницTransmi Ssi Onchai Ns Chai NDR I Vesandtypesofchai NsromwamaОценок пока нет
- No: UON/OP/11 Issue No: 01 Rev No: 02Документ4 страницыNo: UON/OP/11 Issue No: 01 Rev No: 02romwamaОценок пока нет
- Gakuru Feared For His Life', Reveals Successor: Starehe Poll Loser Alleges Vote Stuffing in PetitionДокумент1 страницаGakuru Feared For His Life', Reveals Successor: Starehe Poll Loser Alleges Vote Stuffing in PetitionromwamaОценок пока нет
- Shortlisting Summaries For Technologist Grade ABC, Ebe - Ad-2!25!21 - Applicants (23!03!2021)Документ2 страницыShortlisting Summaries For Technologist Grade ABC, Ebe - Ad-2!25!21 - Applicants (23!03!2021)romwamaОценок пока нет
- FLUID MECHANICS - Force On A Pipe ReducerДокумент1 страницаFLUID MECHANICS - Force On A Pipe ReducerromwamaОценок пока нет
- Sol IntegralsДокумент18 страницSol IntegralsEstefi PeñalozaОценок пока нет
- Marksheet 20172018 F21 1 2 20 FEB116 0025Документ2 страницыMarksheet 20172018 F21 1 2 20 FEB116 0025romwamaОценок пока нет
- Centrifugal PumpsДокумент26 страницCentrifugal PumpsromwamaОценок пока нет
- Knec Technical Exam Timetable - July 2017Документ18 страницKnec Technical Exam Timetable - July 2017romwama100% (1)
- Waiting Bay Secretary ManagerДокумент1 страницаWaiting Bay Secretary ManagerromwamaОценок пока нет
- Pages From 97066064 3813 Probability Theory and Mathematical Statistics For Engineers Structural Engineering Mechanics and Design by Paolo L Gatti 2Документ1 страницаPages From 97066064 3813 Probability Theory and Mathematical Statistics For Engineers Structural Engineering Mechanics and Design by Paolo L Gatti 2romwamaОценок пока нет
- Taylor & Maclaurin SeriesДокумент1 страницаTaylor & Maclaurin SeriesromwamaОценок пока нет
- Error in MeasurementsДокумент1 страницаError in MeasurementsromwamaОценок пока нет
- A Step by Step Guide To Monitoring and Evaluation: Section 1: Explanatory NotesДокумент1 страницаA Step by Step Guide To Monitoring and Evaluation: Section 1: Explanatory NotesromwamaОценок пока нет
- Design of An Affordable Sound Sensor Unit For Chicken CoopsДокумент1 страницаDesign of An Affordable Sound Sensor Unit For Chicken CoopsromwamaОценок пока нет
- Pages From 235532200 Mathematical Statistics KnightДокумент1 страницаPages From 235532200 Mathematical Statistics KnightromwamaОценок пока нет
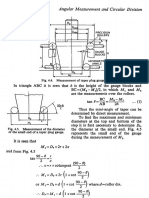
- Angular Measurement and Circular Division: ABC BC (M - MJ/2, MiДокумент1 страницаAngular Measurement and Circular Division: ABC BC (M - MJ/2, MiromwamaОценок пока нет
- DBTRAIT32 4.9 Manual AДокумент121 страницаDBTRAIT32 4.9 Manual ALuis Esteban Gómez CadavidОценок пока нет
- Ultimate Measurement Instruments: General CatalogДокумент56 страницUltimate Measurement Instruments: General Catalogzivkovic brankoОценок пока нет
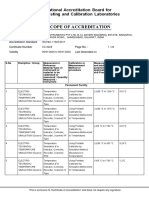
- Scope Location 1 CC-2222Документ24 страницыScope Location 1 CC-2222Ravi Dilawari [Aspire]Оценок пока нет
- CalibrationДокумент25 страницCalibrationSaera Hafiz NikitaОценок пока нет
- Fundamentals of Sound Measurement-1Документ21 страницаFundamentals of Sound Measurement-1Dhaval PatelОценок пока нет
- Operating Manual: Handheld Audio and Acoustic AnalyzerДокумент326 страницOperating Manual: Handheld Audio and Acoustic Analyzeralondra VILLALOBOS lorenzoОценок пока нет
- Extech 407764 DatasheetДокумент1 страницаExtech 407764 Datasheetbo cephusОценок пока нет
- Vibration & Noise Guidance Notes 2Документ54 страницыVibration & Noise Guidance Notes 2QA QCОценок пока нет
- Noise by LawДокумент68 страницNoise by LawSalsa_Picante_BabyОценок пока нет
- AS-70 Quick Instruction V.1Документ33 страницыAS-70 Quick Instruction V.1winger123Оценок пока нет
- TP 1861 E Transport Canada Coast GuardДокумент28 страницTP 1861 E Transport Canada Coast Guardtimitim321Оценок пока нет
- 10039030M00 - PB560 System Final Test Procedure PDFДокумент12 страниц10039030M00 - PB560 System Final Test Procedure PDFDaniel MarquesОценок пока нет
- Noise MonitoringДокумент7 страницNoise Monitoringshahrul rollОценок пока нет
- Chapter 8 - Equipment Maintenance and Calibration: 1. GeneralДокумент18 страницChapter 8 - Equipment Maintenance and Calibration: 1. GeneralAndres MartinezОценок пока нет
- Chapter 4 Noise Measurement and InstrumentationДокумент79 страницChapter 4 Noise Measurement and InstrumentationElvandiОценок пока нет
- CoP - 3.0 - Occupational NoiseДокумент20 страницCoP - 3.0 - Occupational NoiseAnonymous ExWAN2xjFJОценок пока нет
- Building Science 2: Project 1 Final ReportДокумент93 страницыBuilding Science 2: Project 1 Final ReportSurayyn SelvanОценок пока нет
- Chapter B15 - Noise and Vibration 18sep14Документ38 страницChapter B15 - Noise and Vibration 18sep14beck.26Оценок пока нет
- Man Sound Level Meter Pce 322a en PDFДокумент18 страницMan Sound Level Meter Pce 322a en PDFAndhita HermandaОценок пока нет
- Effect of Soundscape Dimensions On Acoustic Comfort in Urban Open PublicspacesДокумент9 страницEffect of Soundscape Dimensions On Acoustic Comfort in Urban Open PublicspacesMehul LaddhaОценок пока нет
- WSHRegs 2007 Consolidated VersionДокумент256 страницWSHRegs 2007 Consolidated VersionKen ShackelОценок пока нет
- Acoustics ARCH 255 - Liapu Wasif 8 10Документ3 страницыAcoustics ARCH 255 - Liapu Wasif 8 10Aurka JamanОценок пока нет
- QP045000-AB Condensate Pump Quality ProcedureДокумент22 страницыQP045000-AB Condensate Pump Quality ProcedureShin KunoОценок пока нет