Вам также может понравиться
- Openmtc: M2M Solutions For Smart Cities and The Internet of ThingsДокумент7 страницOpenmtc: M2M Solutions For Smart Cities and The Internet of Thingsgame___overОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Checkpoint Services: Application Program InterfaceДокумент17 страницCheckpoint Services: Application Program Interfacegame___overОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- NS3 TutorialДокумент46 страницNS3 TutorialahmedabdullaОценок пока нет
- 140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part NumberДокумент2 страницы140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part Numbergame___overОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Maam Ss 0017Документ3 страницыMaam Ss 0017game___overОценок пока нет
- 05 Challenges of LTE Advance Rel10 13Документ75 страниц05 Challenges of LTE Advance Rel10 13game___overОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Specification: 1. HousingДокумент2 страницыSpecification: 1. Housinggame___overОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- J LCB140S 20A: Top View Bottom ViewДокумент2 страницыJ LCB140S 20A: Top View Bottom Viewgame___overОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
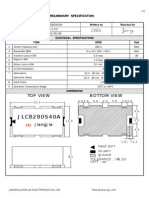
- J LCB280S 40A: Top View Bottom ViewДокумент2 страницыJ LCB280S 40A: Top View Bottom Viewgame___overОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- J Lcl70A: Top View Bottom ViewДокумент2 страницыJ Lcl70A: Top View Bottom Viewgame___overОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- AD780Документ10 страницAD780game___overОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- AH1Документ6 страницAH1game___overОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Gaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZДокумент5 страницGaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZgame___overОценок пока нет
- Jobs and OccupationsДокумент2 страницыJobs and OccupationsmemoinrealifeОценок пока нет
- STM-STM8-STM8S208MB-Learning Centre MCU-Application Notes-STMicroelectronics - Application - Notes - 17Документ24 страницыSTM-STM8-STM8S208MB-Learning Centre MCU-Application Notes-STMicroelectronics - Application - Notes - 17Ahmet AkdoganОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Arabic MusicДокумент3 страницыArabic MusicAnna KassisОценок пока нет
- Exercise 3 InterpretiaДокумент3 страницыExercise 3 InterpretiaMishell SantamaríaОценок пока нет
- Weber, Beckmann - AschenbrödelДокумент15 страницWeber, Beckmann - Aschenbrödelroot80100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Rural Life - Pat KirtleyДокумент6 страницRural Life - Pat KirtleyFrançois LaroucheОценок пока нет
- IS1002Документ13 страницIS1002Suvendra SahooОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- GHJNBBДокумент38 страницGHJNBBAngelica M. ManagaОценок пока нет
- Idioms With Origin and UsesДокумент125 страницIdioms With Origin and UsessirtayyabОценок пока нет
- Capo On 2nd FretДокумент4 страницыCapo On 2nd FretIsabella "Bella" Marie SwanОценок пока нет
- Death of A Salesman SGДокумент7 страницDeath of A Salesman SGThomas DyeОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Sierra Bullones Technical Vocational High School: "Le Jeu de Robin Et de Marion"Документ1 страницаSierra Bullones Technical Vocational High School: "Le Jeu de Robin Et de Marion"Khoy BayronОценок пока нет
- The Ubiquitous Matched Filter A Tutorial and Application To Radar DetectionДокумент18 страницThe Ubiquitous Matched Filter A Tutorial and Application To Radar DetectionlerhlerhОценок пока нет
- RSNR Sample ValДокумент597 страницRSNR Sample ValrawatumedОценок пока нет
- RRB Assistant Loco Pilot ALP Exam PapersДокумент109 страницRRB Assistant Loco Pilot ALP Exam PapersVîkÅsh Mishrã100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Solar Flare Compilation PDFДокумент220 страницSolar Flare Compilation PDFSherry PhippsОценок пока нет
- Candle Cove (TV Show) : Early PreviewsДокумент12 страницCandle Cove (TV Show) : Early PreviewsLuis G. AbbadieОценок пока нет
- Skyrim MusicДокумент4 страницыSkyrim MusicweequasОценок пока нет
- Notice: Airport Noise Compatibility Program: Noise Exposure Maps— Air Navigational Aids Monitor Status ChangeДокумент2 страницыNotice: Airport Noise Compatibility Program: Noise Exposure Maps— Air Navigational Aids Monitor Status ChangeJustia.comОценок пока нет
- ABS-CBN+Corp+2020+17-A+09012021 Fully NotarizedДокумент312 страницABS-CBN+Corp+2020+17-A+09012021 Fully NotarizedPaulОценок пока нет
- Operation Blissful - Prologue - Fall 2010Документ11 страницOperation Blissful - Prologue - Fall 2010Prologue Magazine100% (2)
- Lesson Plan - Nursery Rhyme - 1st TryДокумент6 страницLesson Plan - Nursery Rhyme - 1st TryNadyaCazacОценок пока нет
- Judas Priest - Diamonds and RustДокумент12 страницJudas Priest - Diamonds and RustIvan BombonОценок пока нет
- Fig.1 Block Diagram of TransmitterДокумент5 страницFig.1 Block Diagram of TransmitterKranthi KumarОценок пока нет
- Can't Help Falling in Love (Tab)Документ3 страницыCan't Help Falling in Love (Tab)Courtney DizonОценок пока нет
- Giac Mo Trua PDFДокумент5 страницGiac Mo Trua PDFslowloveОценок пока нет
- LX 2000 Sub Service ManualДокумент12 страницLX 2000 Sub Service ManualcesarlcaОценок пока нет
- Aa 1958 07Документ36 страницAa 1958 07damion.romeroОценок пока нет
- Controller Editor Ableton Live Template Manual EnglishДокумент51 страницаController Editor Ableton Live Template Manual EnglishD CОценок пока нет