Вам также может понравиться
- Action Recognition From Video UsingДокумент16 страницAction Recognition From Video UsingManju YcОценок пока нет
- Exploring Trace Transform For Robust Human Action Recognition - G. Goudelis2013Документ11 страницExploring Trace Transform For Robust Human Action Recognition - G. Goudelis2013Dom DeSiciliaОценок пока нет
- Sun Human Action Recognition ICCV 2015 PaperДокумент9 страницSun Human Action Recognition ICCV 2015 PaperMohit KumarОценок пока нет
- Parallel Processing in Processor Organization: Prabhudev S IrabashettiДокумент4 страницыParallel Processing in Processor Organization: Prabhudev S IrabashettiAdiq CoolОценок пока нет
- Project 7: Case Study With ICT :computer FailuresДокумент14 страницProject 7: Case Study With ICT :computer Failuresaliancista12345100% (1)
- Fuzzy Final Report Washing MachineДокумент20 страницFuzzy Final Report Washing MachineNay Min AungОценок пока нет
- IOT in EducationДокумент5 страницIOT in Educationthanmay VangaveetiОценок пока нет
- Acceptance of Technology With Network Externalities - An EmpiricalДокумент14 страницAcceptance of Technology With Network Externalities - An EmpiricalCandra IrawanОценок пока нет
- 2SGRM3113-DIFFUSION OF INNOVATION-1iiiДокумент11 страниц2SGRM3113-DIFFUSION OF INNOVATION-1iiiCameron RiceОценок пока нет
- Essay Smart SchoolДокумент10 страницEssay Smart Schooldilbutterfly100% (1)
- MMG 3033 - Human Computer Interaction: Hci QuestionДокумент8 страницMMG 3033 - Human Computer Interaction: Hci QuestionNor Arinah Hanani100% (1)
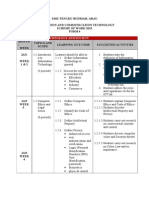
- RPH ICT Tingkatan 4Документ14 страницRPH ICT Tingkatan 4Tokey JersiОценок пока нет
- Soalan HMEF5083 Instructional TechnologyДокумент8 страницSoalan HMEF5083 Instructional TechnologyCikgu Azry Azeem PetronessaОценок пока нет
- Soft ComputingДокумент17 страницSoft ComputingSrinivasa ReddyОценок пока нет
- Artificial Neural Network (ANN) Toolbox For Scilab - Prashant Dave PDFДокумент25 страницArtificial Neural Network (ANN) Toolbox For Scilab - Prashant Dave PDFJesús Manuel Villalonga JiménezОценок пока нет
- GGGB6023 Tugasan Tutorial 3 - P69060 Mior SyazrilДокумент5 страницGGGB6023 Tugasan Tutorial 3 - P69060 Mior SyazrilAmizan AbdullahОценок пока нет
- Unit 1: 1. Introduction To Artificial Neural NetworkДокумент17 страницUnit 1: 1. Introduction To Artificial Neural Networkjai geraОценок пока нет
- Ska3023 Instrumentation Analytical Chemistry Exercise 1 Spectroscopy/SpectrometryДокумент2 страницыSka3023 Instrumentation Analytical Chemistry Exercise 1 Spectroscopy/Spectrometryhasni ab ghaniОценок пока нет
- E-Learning ReportДокумент24 страницыE-Learning ReportAkash G S KumarОценок пока нет
- Research Proposal On Radio Over FiberДокумент5 страницResearch Proposal On Radio Over FiberYen HongОценок пока нет
- Assignment 3 - Reflective Writing Based On Sharing Session With IndustryДокумент4 страницыAssignment 3 - Reflective Writing Based On Sharing Session With IndustryamalinaОценок пока нет
- WiFi Registration University of AllДокумент12 страницWiFi Registration University of AllsahrasaqsdОценок пока нет
- Assignment MPPP1203Документ2 страницыAssignment MPPP1203Aura AurumОценок пока нет
- Technology and Assessment at Tertiary Level Case of Limkokwing University of Creative TechnologyДокумент8 страницTechnology and Assessment at Tertiary Level Case of Limkokwing University of Creative TechnologyTakura BhilaОценок пока нет
- LABsheet WirelessДокумент5 страницLABsheet WirelessFarEast Ramdzan100% (1)
- HCI Chapter 1Документ23 страницыHCI Chapter 1AschenakiОценок пока нет
- ICT in Malaysian Schools Policy and StrategiesДокумент6 страницICT in Malaysian Schools Policy and StrategiesMisfit XavierОценок пока нет
- Bit 30803 Project InstructionsДокумент3 страницыBit 30803 Project InstructionsNurul Izzatie0% (1)
- ESE 633 Statistics in EducationДокумент10 страницESE 633 Statistics in Educationyasini100% (1)
- FKJ Industrial Training Handbook 2017Документ20 страницFKJ Industrial Training Handbook 2017Shafira & GeaОценок пока нет
- Chapter 10, Two-Stage Cluster SamplingДокумент27 страницChapter 10, Two-Stage Cluster SamplingHelen WangОценок пока нет
- Mapping Addie and Seels and Glasgow AskarДокумент8 страницMapping Addie and Seels and Glasgow Askarapi-369902105100% (1)
- Csc186topic 1 - Part2Документ34 страницыCsc186topic 1 - Part2Nurain DamiaОценок пока нет
- Penggunaan Smart Mind Map Dalam Pengajaran Dan Pembelajaran Pendidikan MoralДокумент9 страницPenggunaan Smart Mind Map Dalam Pengajaran Dan Pembelajaran Pendidikan MoralAzmil Hashim100% (1)
- Machine Learning in RoboticsДокумент5 страницMachine Learning in RoboticsEditor IJTSRDОценок пока нет
- Analisis Dan Sintesis PDFДокумент21 страницаAnalisis Dan Sintesis PDFSamsul BahtiarОценок пока нет
- Lab1 Beea1343 Problemsolving Norshazlina Binti Romzei Bmmps1-2Документ9 страницLab1 Beea1343 Problemsolving Norshazlina Binti Romzei Bmmps1-2quirkycactusОценок пока нет
- Arbib, M A (2005) From Monkey-Like Action Recognition To Human Language An Evolutionary Framework For Neurolinguistics Behavioral and Brain SciencesДокумент60 страницArbib, M A (2005) From Monkey-Like Action Recognition To Human Language An Evolutionary Framework For Neurolinguistics Behavioral and Brain Sciencesnbj65813Оценок пока нет
- Sequence Detector PaperДокумент8 страницSequence Detector PaperVicky RОценок пока нет
- Levenberg-Marquardt Backpropagation - MATLAB TrainlmДокумент2 страницыLevenberg-Marquardt Backpropagation - MATLAB TrainlmLuis Carlos Ruiz CardenasОценок пока нет
- Neural Networks PDFДокумент89 страницNeural Networks PDFIkshwakОценок пока нет
- Student Perceptions of Cloud Applications Effectiveness in Higher EducationДокумент8 страницStudent Perceptions of Cloud Applications Effectiveness in Higher EducationClaireОценок пока нет
- Taklimat 962 SbaДокумент7 страницTaklimat 962 SbaNg Shi TengОценок пока нет
- Sustaining Robot Technology in Brunei Schools Through CompetitionsДокумент7 страницSustaining Robot Technology in Brunei Schools Through CompetitionsSTEPCentreОценок пока нет
- Tutorial 5Документ8 страницTutorial 5ct saharahОценок пока нет
- Analysis of Performance - ManualДокумент9 страницAnalysis of Performance - Manualapi-456869689Оценок пока нет
- Teacher Readiness and Barriers in Using The Virtual Learning Environment Frog Vle For Teaching and Learning in Secondary Schools in Benut Pontian LwB2zДокумент12 страницTeacher Readiness and Barriers in Using The Virtual Learning Environment Frog Vle For Teaching and Learning in Secondary Schools in Benut Pontian LwB2zkashmirrose21Оценок пока нет
- RPT Add Maths Form 4 DLP 2021Документ20 страницRPT Add Maths Form 4 DLP 2021Lau Chiew Ing50% (2)
- YEARLY LESSON PLAN Form 3 2020 (Edited Penjajaran)Документ15 страницYEARLY LESSON PLAN Form 3 2020 (Edited Penjajaran)MUHAMMAD HAZRAN BIN ISMAILОценок пока нет
- Physics Lab Report 1Документ8 страницPhysics Lab Report 1Declan Gale Anak DellyОценок пока нет
- Communications Engineering PDFДокумент2 страницыCommunications Engineering PDFTim100% (1)
- MakalahДокумент6 страницMakalahNurul HasnitaОценок пока нет
- Applications of Community Mining AlgorithmsДокумент17 страницApplications of Community Mining AlgorithmsNelson RajaОценок пока нет
- Information Retrieval Systems in Academic LibrariesДокумент5 страницInformation Retrieval Systems in Academic LibrariesLucia CavorsiОценок пока нет
- Tahap Kesediaan Pensyarah Terhadap Penggunaan M-Pembelajaran Dalam Sistem Pendidikan Dan Latihan Teknik Dan Vokasional (TVET)Документ17 страницTahap Kesediaan Pensyarah Terhadap Penggunaan M-Pembelajaran Dalam Sistem Pendidikan Dan Latihan Teknik Dan Vokasional (TVET)Khairul Yop AzreenОценок пока нет
- Automatic Detection and Analysis of Player Action in Moving Background Sports Video Sequences-MwzДокумент14 страницAutomatic Detection and Analysis of Player Action in Moving Background Sports Video Sequences-Mwzjulio perezОценок пока нет
- 5W1HДокумент2 страницы5W1HMarcelo Geraldo TeixeiraОценок пока нет
- Tracking with Particle Filter for High-dimensional Observation and State SpacesОт EverandTracking with Particle Filter for High-dimensional Observation and State SpacesОценок пока нет
- Multi Tracking Icassp11Документ4 страницыMulti Tracking Icassp11jozek223Оценок пока нет
- Sensor Deployment Using Particle Swarm Optimization: Nikitha KukunuruДокумент7 страницSensor Deployment Using Particle Swarm Optimization: Nikitha KukunuruArindam PalОценок пока нет
- Hand Book of SEMs in SRДокумент103 страницыHand Book of SEMs in SRAnantaBalia TrustОценок пока нет
- Computer Programming Assignment - 3Документ3 страницыComputer Programming Assignment - 3Waqas MehmoodОценок пока нет
- Introduction To Keras!: Vincent Lepetit!Документ33 страницыIntroduction To Keras!: Vincent Lepetit!Serigne Modou NDIAYEОценок пока нет
- HSC ICT Sheet Chapter 02Документ31 страницаHSC ICT Sheet Chapter 02sdfgdfsgdfОценок пока нет
- Eric Zimmerman ToolsДокумент390 страницEric Zimmerman ToolsMichel GignonОценок пока нет
- Ubuntu Unity PDFДокумент1 страницаUbuntu Unity PDFadam_tomasОценок пока нет
- MAD Practical Writing Material 1,2 and 7-15Документ31 страницаMAD Practical Writing Material 1,2 and 7-1512nzalteОценок пока нет
- Xcalibrat Batch UserДокумент418 страницXcalibrat Batch Userwenyuchen96Оценок пока нет
- (Aug, 2022) Fast2test AZ-900 PDF Dumps and AZ-900 Exam Questions (78-93)Документ10 страниц(Aug, 2022) Fast2test AZ-900 PDF Dumps and AZ-900 Exam Questions (78-93)Marcio ArrudaОценок пока нет
- Orca FlexДокумент473 страницыOrca FlexLava SatОценок пока нет
- Seven Cyber Security Trends For 2020Документ11 страницSeven Cyber Security Trends For 2020Karan OjhaОценок пока нет
- P4 Ab Initio - Lookup File and Reusability FeaturesДокумент29 страницP4 Ab Initio - Lookup File and Reusability FeaturesSreenivas YadavОценок пока нет
- The "Small" Automatic Ring Shear Tester RST-XS: Schüttgutmesstechnik Dr.-Ing. Dietmar SchulzeДокумент2 страницыThe "Small" Automatic Ring Shear Tester RST-XS: Schüttgutmesstechnik Dr.-Ing. Dietmar SchulzeDianaNgОценок пока нет
- ACOS730 Flyer 201707 ENДокумент5 страницACOS730 Flyer 201707 ENSentaОценок пока нет
- Cisco CVD Icons KeyДокумент5 страницCisco CVD Icons Keyfmp0809Оценок пока нет
- Apps Like Audible But Are Free - Google SearchДокумент1 страницаApps Like Audible But Are Free - Google SearchArsh DobhalОценок пока нет
- Quantum Safety PLC Schneider ElectricДокумент176 страницQuantum Safety PLC Schneider ElectricIan Mauro Concha ChiaОценок пока нет
- Safari Montage Quick Start GuideДокумент10 страницSafari Montage Quick Start Guideerin05Оценок пока нет
- Procedural Extension To SQL Using Triggers - Lecture 2: DR Akhtar AliДокумент28 страницProcedural Extension To SQL Using Triggers - Lecture 2: DR Akhtar AliTanveerОценок пока нет
- Chapter 01 - Introduction PDFДокумент12 страницChapter 01 - Introduction PDFJmr ZrtОценок пока нет
- Insurance Management System ProjectДокумент5 страницInsurance Management System ProjectKeerthi Vasan LОценок пока нет
- SystemДокумент2 страницыSystemAndrew ShevchenkoОценок пока нет
- Industrial Training Report: Submitted By: Puru Govind (02bce070) Btech (Cse)Документ21 страницаIndustrial Training Report: Submitted By: Puru Govind (02bce070) Btech (Cse)Er Meghvrat AryaОценок пока нет
- E. Calameo: For The Students: This Is A Great Tool For Learning About Design and LayoutДокумент3 страницыE. Calameo: For The Students: This Is A Great Tool For Learning About Design and LayoutBilly JoeОценок пока нет
- Abinitio Faq'sДокумент19 страницAbinitio Faq'sparvEenОценок пока нет
- Data StructuresДокумент6 страницData StructuresArkadeep RoyОценок пока нет
- Software Quality Assurance Plan PDFДокумент35 страницSoftware Quality Assurance Plan PDFanjas_tsОценок пока нет
- Compatibilitylist steckerPROДокумент4 страницыCompatibilitylist steckerPROTecu CristiОценок пока нет
- BE1 Final Without Recheckreassessment - 453112Документ1 страницаBE1 Final Without Recheckreassessment - 453112MoloОценок пока нет
- ANSYS Mechanical APDL Parallel Processing GuideДокумент56 страницANSYS Mechanical APDL Parallel Processing GuideSuri Kens MichuaОценок пока нет