Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- BIBLIOGRAFIEДокумент1 страницаBIBLIOGRAFIEfundatia_gaudeamusОценок пока нет
- Bilant: F10 - Pag. 1Документ4 страницыBilant: F10 - Pag. 1fundatia_gaudeamusОценок пока нет
- Calculul coeficientului de stabilitate Fs - Metoda Bishop - gruparea fundamentala mαДокумент22 страницыCalculul coeficientului de stabilitate Fs - Metoda Bishop - gruparea fundamentala mαfundatia_gaudeamusОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
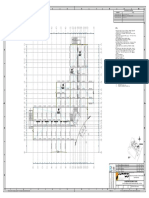
- Plan 6Документ1 страницаPlan 6fundatia_gaudeamusОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- 97 Michaelis-Master 1Документ94 страницы97 Michaelis-Master 1fundatia_gaudeamusОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- ContentДокумент2 страницыContentfundatia_gaudeamusОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- 01 Structure Guesthouse and Clinic p01 15Документ1 страница01 Structure Guesthouse and Clinic p01 15fundatia_gaudeamusОценок пока нет
- 01 Structure Guesthouse and Clinic p01 15Документ1 страница01 Structure Guesthouse and Clinic p01 15fundatia_gaudeamusОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Introducere Generatoare Cu AburДокумент2 страницыIntroducere Generatoare Cu Aburfundatia_gaudeamusОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- 01 - Structure Guesthouse and Clinic-P01-15 PDFДокумент1 страница01 - Structure Guesthouse and Clinic-P01-15 PDFfundatia_gaudeamusОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- ApaДокумент12 страницApafundatia_gaudeamusОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- BOMMI PRD 07.0014 Rev.00 Mooring OperationsДокумент14 страницBOMMI PRD 07.0014 Rev.00 Mooring Operationsfundatia_gaudeamusОценок пока нет
- 01 Structure Guesthouse and Clinic p01 15Документ1 страница01 Structure Guesthouse and Clinic p01 15fundatia_gaudeamusОценок пока нет
- 01 Structure Guesthouse and Clinic p01 15Документ1 страница01 Structure Guesthouse and Clinic p01 15fundatia_gaudeamusОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- BOMMI-PRD-03.0002-Rev.00 - Cargo and Hazardous MaterialsДокумент17 страницBOMMI-PRD-03.0002-Rev.00 - Cargo and Hazardous Materialsfundatia_gaudeamusОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- BOMMI-PRD-03.0008-Rev.00 - Personal Protective EquipmentДокумент10 страницBOMMI-PRD-03.0008-Rev.00 - Personal Protective Equipmentfundatia_gaudeamusОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- 01 Structure Guesthouse and Clinic p01 15Документ1 страница01 Structure Guesthouse and Clinic p01 15fundatia_gaudeamusОценок пока нет
- BOMMI PRD 07.0014 Rev.00 Mooring OperationsДокумент14 страницBOMMI PRD 07.0014 Rev.00 Mooring Operationsfundatia_gaudeamusОценок пока нет
- BOMMI-PRD-07.0013-Rev.00 - Anchor Handling and Towing OperationsДокумент10 страницBOMMI-PRD-07.0013-Rev.00 - Anchor Handling and Towing Operationsfundatia_gaudeamus100% (3)
- BOMMI-PRD-07.0011-Rev.00 - Personnel Transfer OperationsДокумент11 страницBOMMI-PRD-07.0011-Rev.00 - Personnel Transfer Operationsfundatia_gaudeamusОценок пока нет
- BOMMI PRD 03.0003 Rev.00 Methanol OperationsДокумент8 страницBOMMI PRD 03.0003 Rev.00 Methanol Operationsfundatia_gaudeamusОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- BOMMI-PRD-07 0009-Rev.00 - Bunkering OperationsДокумент8 страницBOMMI-PRD-07 0009-Rev.00 - Bunkering Operationsfundatia_gaudeamusОценок пока нет
- Cvconta 2Документ1 страницаCvconta 2fundatia_gaudeamusОценок пока нет
- ManualДокумент304 страницыManualfundatia_gaudeamusОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Lecture BouffonДокумент1 страницаLecture BouffonCarlos Enrique GuerraОценок пока нет
- Teamcenter 10.1: Publication Number PLM00015 JДокумент122 страницыTeamcenter 10.1: Publication Number PLM00015 JmohanОценок пока нет
- Teaching PowerPoint Slides - Chapter 5Документ19 страницTeaching PowerPoint Slides - Chapter 5Azril ShazwanОценок пока нет
- Wiska Varitain - 0912Документ18 страницWiska Varitain - 0912Anonymous hHWOMl4FvОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- LP Pe 3Q - ShaynevillafuerteДокумент3 страницыLP Pe 3Q - ShaynevillafuerteMa. Shayne Rose VillafuerteОценок пока нет
- Half Yearly Examination, 2017-18: MathematicsДокумент7 страницHalf Yearly Examination, 2017-18: MathematicsSusanket DuttaОценок пока нет
- Lesson Plan Letter SДокумент4 страницыLesson Plan Letter Sapi-317303624100% (1)
- Abdominal Migraine and HomoeopathyДокумент17 страницAbdominal Migraine and HomoeopathyDr. Rajneesh Kumar Sharma MD HomОценок пока нет
- Project Report For Tunnel ExcavationДокумент19 страницProject Report For Tunnel ExcavationAbhishek Sarkar50% (2)
- Installation of Submarine PE PipesДокумент84 страницыInstallation of Submarine PE Pipeswaseemiqbal133100% (2)
- Oracle SOA Suite Oracle Containers For J2EE Feature Overview OC4JДокумент10 страницOracle SOA Suite Oracle Containers For J2EE Feature Overview OC4JLuis YañezОценок пока нет
- Banin Cawu 1: Panitia Ujian Perguruan Islam Mathali'Ul FalahДокумент4 страницыBanin Cawu 1: Panitia Ujian Perguruan Islam Mathali'Ul FalahKajen PatiОценок пока нет
- All About TarlacДокумент12 страницAll About TarlacAnonymous uLb5vOjXОценок пока нет
- P6 - TT2 - Revision Test 2021-2022 Page 1 of 11Документ11 страницP6 - TT2 - Revision Test 2021-2022 Page 1 of 11Nilkanth DesaiОценок пока нет
- Swot Analysis of Indian EconomyДокумент2 страницыSwot Analysis of Indian EconomymyeyesrbeautОценок пока нет
- Literature Review - Part Time Job Among StudentДокумент3 страницыLiterature Review - Part Time Job Among StudentMarria65% (20)
- QSasДокумент50 страницQSasArvin Delos ReyesОценок пока нет
- Pizza Restaurant PowerPoint TemplatesДокумент49 страницPizza Restaurant PowerPoint TemplatesAindrila BeraОценок пока нет
- A Structural Modelo of Limital Experienci Un TourismДокумент15 страницA Structural Modelo of Limital Experienci Un TourismcecorredorОценок пока нет
- WCDMA Radio Access OverviewДокумент8 страницWCDMA Radio Access OverviewDocMasterОценок пока нет
- Sub-Wings of YuvanjaliДокумент2 страницыSub-Wings of Yuvanjalin_tapovan987100% (1)
- Presentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022Документ9 страницPresentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022dakmts07Оценок пока нет
- Task of ProjectДокумент14 страницTask of ProjectAbdul Wafiy NaqiuddinОценок пока нет
- Macros and DirectiveДокумент7 страницMacros and DirectiveAbdul MoeedОценок пока нет
- (Ebook - Antroposofia - EnG) - Rudolf Steiner - Fundamentals of TheraphyДокумент58 страниц(Ebook - Antroposofia - EnG) - Rudolf Steiner - Fundamentals of Theraphyblueyes247Оценок пока нет
- Introduction: Meaning of HypothesisДокумент8 страницIntroduction: Meaning of HypothesisMANISH KUMARОценок пока нет
- Royal British College Dancesport TeamДокумент10 страницRoyal British College Dancesport TeamAnna rose CabatinganОценок пока нет
- High Speed Power TransferДокумент33 страницыHigh Speed Power TransferJAYKUMAR SINGHОценок пока нет
- The Limits of The Sectarian Narrative in YemenДокумент19 страницThe Limits of The Sectarian Narrative in Yemenهادي قبيسيОценок пока нет
- Rosewood Case AnalysisДокумент5 страницRosewood Case AnalysisJayant KushwahaОценок пока нет
- Summary: Unreasonable Hospitality: The Remarkable Power of Giving People More than They Expect by Will Guidara: Key Takeaways, Summary & Analysis IncludedОт EverandSummary: Unreasonable Hospitality: The Remarkable Power of Giving People More than They Expect by Will Guidara: Key Takeaways, Summary & Analysis IncludedРейтинг: 2.5 из 5 звезд2.5/5 (5)
- Waiter Rant: Thanks for the Tip—Confessions of a Cynical WaiterОт EverandWaiter Rant: Thanks for the Tip—Confessions of a Cynical WaiterРейтинг: 3.5 из 5 звезд3.5/5 (487)