Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Bus Sectionaliser PanelДокумент1 страницаBus Sectionaliser PanelKashyap DubeyОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Busbar Protection PanelДокумент1 страницаBusbar Protection PanelKashyap DubeyОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The State Variables of A Dynamic SystemДокумент1 страницаThe State Variables of A Dynamic SystemKashyap DubeyОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Sequence of Operation Starts As FollowsДокумент1 страницаThe Sequence of Operation Starts As FollowsKashyap DubeyОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Standard PracticeДокумент1 страницаStandard PracticeKashyap DubeyОценок пока нет
- Bus Coupler PanelДокумент1 страницаBus Coupler PanelKashyap DubeyОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Transfer Bus Coupler Panel PDFДокумент1 страницаTransfer Bus Coupler Panel PDFKashyap DubeyОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Concepts of Damping Ratio and Natural FrequencyДокумент1 страницаConcepts of Damping Ratio and Natural FrequencyKashyap DubeyОценок пока нет
- Corrosion by Alkaline SolutionДокумент1 страницаCorrosion by Alkaline SolutionKashyap DubeyОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Corrosion Mechanism of Water WallДокумент1 страницаCorrosion Mechanism of Water WallKashyap DubeyОценок пока нет
- Adding A New Bus To The NetworkДокумент1 страницаAdding A New Bus To The NetworkKashyap DubeyОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Corrosion by A Acidic SolutionДокумент1 страницаCorrosion by A Acidic SolutionKashyap DubeyОценок пока нет
- Colling TowerДокумент1 страницаColling TowerKashyap DubeyОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Generator Overloads Protection (51G)Документ1 страницаGenerator Overloads Protection (51G)Kashyap DubeyОценок пока нет
- Generator and Its ProtectionДокумент1 страницаGenerator and Its ProtectionKashyap DubeyОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Requirements of A Circuit BreakerДокумент1 страницаRequirements of A Circuit BreakerKashyap DubeyОценок пока нет
- Generator - Transformer Differential Protection (87T)Документ1 страницаGenerator - Transformer Differential Protection (87T)Kashyap DubeyОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Generator Differential Protection (87 G)Документ1 страницаGenerator Differential Protection (87 G)Kashyap DubeyОценок пока нет
- Points To Be Verified While Drawing Circuit BreakersДокумент1 страницаPoints To Be Verified While Drawing Circuit BreakersKashyap DubeyОценок пока нет
- Backup Impedance Protection (21G)Документ1 страницаBackup Impedance Protection (21G)Kashyap DubeyОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Generator Protection - Various FunctionsДокумент1 страницаGenerator Protection - Various FunctionsKashyap DubeyОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Periodical TestingsДокумент1 страницаPeriodical TestingsKashyap DubeyОценок пока нет
- Protection o F 6.6 KV System in Generating StationsДокумент1 страницаProtection o F 6.6 KV System in Generating StationsKashyap DubeyОценок пока нет
- Primary Injection TestДокумент1 страницаPrimary Injection TestKashyap DubeyОценок пока нет
- Norms of Protection For 9, Ehv Class Power TransformersДокумент1 страницаNorms of Protection For 9, Ehv Class Power TransformersKashyap DubeyОценок пока нет
- Types of Control PanelsДокумент1 страницаTypes of Control PanelsKashyap DubeyОценок пока нет
- Breaker Failure ProtectionДокумент1 страницаBreaker Failure ProtectionKashyap DubeyОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Points To Be Checked While Drawing CTsДокумент1 страницаPoints To Be Checked While Drawing CTsKashyap DubeyОценок пока нет
- Device Numbers and Their NomemclatureДокумент1 страницаDevice Numbers and Their NomemclatureKashyap DubeyОценок пока нет
- Relay FamilyДокумент1 страницаRelay FamilyKashyap DubeyОценок пока нет
- Power Point Exercise IДокумент6 страницPower Point Exercise IAze FerriolsОценок пока нет
- A Marvellous Transformation - 1020 LДокумент2 страницыA Marvellous Transformation - 1020 LParth ThakkarОценок пока нет
- Ais For PROTONДокумент18 страницAis For PROTONAfaf RadziОценок пока нет
- Update RS232 TXNR905 E080313Документ3 страницыUpdate RS232 TXNR905 E080313varimasrОценок пока нет
- ESCL-QSP-005, Corrective Action ProcedureДокумент6 страницESCL-QSP-005, Corrective Action Procedureadiqualityconsult100% (1)
- CH 12Документ76 страницCH 12Christian JeremiaОценок пока нет
- Industrial PsychologyДокумент4 страницыIndustrial PsychologyNeo VeloriaОценок пока нет
- Cenizas de Izalco - Capitulos 1 Al 15Документ26 страницCenizas de Izalco - Capitulos 1 Al 15Gafriel100% (3)
- Free W3 Blog TemplateДокумент4 страницыFree W3 Blog TemplateMaseko CharuzuОценок пока нет
- The Effect of Grammar Teaching On Writing Development PDFДокумент18 страницThe Effect of Grammar Teaching On Writing Development PDFRIANОценок пока нет
- Finding Answers Through Data Collection: Data Collection Procedure and Skills Using Varied InstrumentsДокумент4 страницыFinding Answers Through Data Collection: Data Collection Procedure and Skills Using Varied InstrumentsJude BautistaОценок пока нет
- Data SampleДокумент16 страницData SamplelawrenceОценок пока нет
- Block 7Документ15 страницBlock 7api-3703652Оценок пока нет
- Course Outline in Grade 1 MathematicsДокумент3 страницыCourse Outline in Grade 1 MathematicsRoselyn GutasОценок пока нет
- Dukungan Suami Terhadap Pemberian Asi Eksklusif PaДокумент11 страницDukungan Suami Terhadap Pemberian Asi Eksklusif PayolandaОценок пока нет
- MODULI I LITERATURA Za ALAN Master Optometriju - OdtДокумент3 страницыMODULI I LITERATURA Za ALAN Master Optometriju - OdtVladislav StevanovicОценок пока нет
- Kcpe Maths Made Familiar QNSДокумент96 страницKcpe Maths Made Familiar QNSGodwin Ayieko100% (1)
- WHITECROFT Energy Directive BrochureДокумент32 страницыWHITECROFT Energy Directive BrochureAriel TambisОценок пока нет
- Textual Equivalence: Thematic and Information Structures: Because and Moreover, Which Are Called ConjunctionsДокумент7 страницTextual Equivalence: Thematic and Information Structures: Because and Moreover, Which Are Called ConjunctionsDaniEllaNetОценок пока нет
- ABC & Balance ScorecardДокумент9 страницABC & Balance Scorecardnanduri1979Оценок пока нет
- Raj Yoga ReportДокумент17 страницRaj Yoga ReportSweaty Sunny50% (2)
- Anjali............................. Internship ReportДокумент19 страницAnjali............................. Internship ReportamitanjuОценок пока нет
- (1997) Process Capability Analysis For Non-Normal Relay Test DataДокумент8 страниц(1997) Process Capability Analysis For Non-Normal Relay Test DataNELSONHUGOОценок пока нет
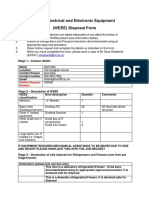
- Waste Electrical and Electronic Equipment (WEEE) Disposal FormДокумент2 страницыWaste Electrical and Electronic Equipment (WEEE) Disposal FormJake HurleyОценок пока нет
- Sony MPF920-Z Floppy Disk DriveДокумент2 страницыSony MPF920-Z Floppy Disk DrivePaquitoSalazarОценок пока нет
- Finding Herself. KelloggДокумент12 страницFinding Herself. KelloggMinerva MinasОценок пока нет
- Daftar BukuДокумент6 страницDaftar Bukuretnopamungkas55yahoОценок пока нет
- EN GB SPIKE Prime Python ProgramsДокумент31 страницаEN GB SPIKE Prime Python ProgramsAMINE BOURASSОценок пока нет
- A1603 WTДокумент9 страницA1603 WTnanichowsОценок пока нет
- Lec21 2011Документ25 страницLec21 2011ireall3017Оценок пока нет
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsОт EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressОт EverandNuclear Energy in the 21st Century: World Nuclear University PressРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceОт EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceОценок пока нет
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)