Вам также может понравиться
- Criterio de RouthДокумент9 страницCriterio de RouthFabio SplendorОценок пока нет
- Metodo de Routh-HurwitzДокумент6 страницMetodo de Routh-Hurwitzchinomania100% (2)
- Aplicacion de Las Integrales de Newton-CotesДокумент6 страницAplicacion de Las Integrales de Newton-CotesFernando Vaz CorОценок пока нет
- Semana 4 - Representación de SistemasДокумент43 страницыSemana 4 - Representación de SistemasCamilo San JuanОценок пока нет
- Tarea 9. Herramientas ComputacionalesДокумент7 страницTarea 9. Herramientas ComputacionalesAndy TorresОценок пока нет
- Apuntes EjemplosДокумент11 страницApuntes EjemplosAntonio Jesus Cardenas HernandezОценок пока нет
- AritmeticosДокумент15 страницAritmeticosjeffff317Оценок пока нет
- Teorema Del Valor FinalДокумент3 страницыTeorema Del Valor FinalMisael ChurquinaОценок пока нет
- Ejercicios de Teoria de ControlДокумент13 страницEjercicios de Teoria de ControlstalinОценок пока нет
- Neybel PereiraДокумент8 страницNeybel PereiraJose AlejandroОценок пока нет
- Cap. 4 Funcion Impulso UnitarioДокумент13 страницCap. 4 Funcion Impulso Unitariovick156Оценок пока нет
- 3er Laboratorio - de - Control - FINAL PDFДокумент7 страниц3er Laboratorio - de - Control - FINAL PDFIVAN ALONSO CCAHUACHIA LETONAОценок пока нет
- Ejercicios de Impulsos, Rampas y Escalares de SeñalesДокумент4 страницыEjercicios de Impulsos, Rampas y Escalares de SeñalesAntonioОценок пока нет
- Capitulo1 Soria SolucionarioДокумент13 страницCapitulo1 Soria SolucionarioMauricio NavarreteОценок пока нет
- Números Pares Y Números Primos.: Ingeniera en Computación Sistemas DigitalesДокумент9 страницNúmeros Pares Y Números Primos.: Ingeniera en Computación Sistemas DigitalesAldo CarretoОценок пока нет
- Solucionario de Métodos Numéricos 4Документ10 страницSolucionario de Métodos Numéricos 4TR DanielОценок пока нет
- 06 - Válvulas - Regulación - Caudal 14iДокумент48 страниц06 - Válvulas - Regulación - Caudal 14iLiliana KennedyОценок пока нет
- Preparatorio No.2 - Brito - HerediaДокумент6 страницPreparatorio No.2 - Brito - HerediaDiego CastilloОценок пока нет
- Mux y DemuxДокумент13 страницMux y DemuxfrandyОценок пока нет
- Proyecto ALU. 2Документ20 страницProyecto ALU. 2Abraham HeyerОценок пока нет
- Laboratorio Nº2Документ9 страницLaboratorio Nº2Hgg KjjhОценок пока нет
- Aplicaciones Ecuaciones Diferenciales 1er OrdenДокумент12 страницAplicaciones Ecuaciones Diferenciales 1er OrdenSheyla CárdenasОценок пока нет
- Hernandez Hernandez Luis Angel EXAMEN U3Документ7 страницHernandez Hernandez Luis Angel EXAMEN U3Luis Angel Hernandez HernandezОценок пока нет
- Guía de Ejemplo PDFДокумент4 страницыGuía de Ejemplo PDFNairoby Espinosa0% (1)
- Reglas para La Construcción Del Lugar de Raíces de Un SistemaДокумент5 страницReglas para La Construcción Del Lugar de Raíces de Un Sistemamdonnet9Оценок пока нет
- Ejercicio de Bandas Diseño MecanicoДокумент2 страницыEjercicio de Bandas Diseño MecanicoJorge AlvaradoОценок пока нет
- Guia de Ejercicios 6 - LGR - Ing. SalazarДокумент4 страницыGuia de Ejercicios 6 - LGR - Ing. Salazaredgar cardenasОценок пока нет
- Variables de Estado ElectricoДокумент2 страницыVariables de Estado ElectricoAndres Felipe Paredes TafurОценок пока нет
- Banderas AVR MicrocontroladorДокумент3 страницыBanderas AVR MicrocontroladorAlejandro Colorado100% (1)
- Lab3 Teoria de Control Parte 2 y 3Документ6 страницLab3 Teoria de Control Parte 2 y 3Carlos RafaelОценок пока нет
- TeoriadeControl ResueltosdeFusarioДокумент14 страницTeoriadeControl ResueltosdeFusariomartdiazОценок пока нет
- Error en Estado Estacionario ResueltoДокумент9 страницError en Estado Estacionario ResueltoTrabajos AcademicosОценок пока нет
- Problema Tanques InteractuantesДокумент6 страницProblema Tanques InteractuantesjimenaОценок пока нет
- Registros de DesplazamientoДокумент17 страницRegistros de DesplazamientoJULIÁN SAÚL DÁVILA REQUE100% (1)
- Dígrafos - MatricesДокумент20 страницDígrafos - MatricesGianellaChonlónОценок пока нет
- Circuito Electrico Mixto y Las Ecuaciones DiferencialesДокумент14 страницCircuito Electrico Mixto y Las Ecuaciones DiferencialesGustavo De VitaОценок пока нет
- Matlab 2Документ7 страницMatlab 2Ma Antonieta GalindoОценок пока нет
- Instrucciones Que Manejan RegistrosДокумент10 страницInstrucciones Que Manejan RegistrosEder SalvadorОценок пока нет
- Circuito Equivalente Con Ensayos de Vacio y Cortocircuito AutoguardadoДокумент7 страницCircuito Equivalente Con Ensayos de Vacio y Cortocircuito AutoguardadoDavid EnriquezОценок пока нет
- Ejercicios de Estabilidad en El Tiempo DiscretoДокумент2 страницыEjercicios de Estabilidad en El Tiempo DiscretoDaniel Cerna0% (2)
- EjMate2015 1Документ17 страницEjMate2015 1Rodrigo AliphatОценок пока нет
- Examen Sep06 Res234aДокумент3 страницыExamen Sep06 Res234apctronicОценок пока нет
- Control Proporcional DerivativoДокумент15 страницControl Proporcional Derivativofreddy gonzalezОценок пока нет
- Trabajo Calculo 2Документ6 страницTrabajo Calculo 2Franko Edgar Martinez ReateguiОценок пока нет
- Multiplexores y Cicuito SecuencialДокумент7 страницMultiplexores y Cicuito SecuencialEduardo Condori Ochoa100% (1)
- Procedimiento de Examen de Senoidales y Fasores PDFДокумент22 страницыProcedimiento de Examen de Senoidales y Fasores PDFAlan PradoОценок пока нет
- Colector de Delgas QuindeДокумент8 страницColector de Delgas QuindeJos Quind100% (1)
- Método de Euler y Euler MejoradoДокумент13 страницMétodo de Euler y Euler MejoradoAndres Alejandro TapiaОценок пока нет
- Diagrama Bloques FormulasДокумент8 страницDiagrama Bloques FormulasherktorОценок пока нет
- Ensayo de Control 1 (Control Digital)Документ5 страницEnsayo de Control 1 (Control Digital)Paul GuillenОценок пока нет
- Equipo 2 - Tarea 1Документ18 страницEquipo 2 - Tarea 1Jesus Josué González GutiérrezОценок пока нет
- Estabilidad de Sistema de Control DigitalДокумент7 страницEstabilidad de Sistema de Control DigitalKolb JavierОценок пока нет
- CTM Ejemplo - Modelación Del Experimento Barra y BolaДокумент7 страницCTM Ejemplo - Modelación Del Experimento Barra y BolaWilson Barco MОценок пока нет
- Sistemas Control Estabilidad y Lugar Geometrico Raices Presentacion PowerpointДокумент38 страницSistemas Control Estabilidad y Lugar Geometrico Raices Presentacion PowerpointnestorblancaunefaОценок пока нет
- Teoria C4 Analisis de EstabilidadДокумент7 страницTeoria C4 Analisis de EstabilidadMauricio Gómez SarmientoОценок пока нет
- Estabilidad Routh HurwitzДокумент17 страницEstabilidad Routh HurwitzCristian CarrilloОценок пока нет
- Criterio de Estabilidad de Routh PDFДокумент13 страницCriterio de Estabilidad de Routh PDFOriolОценок пока нет
- Criterio RuthДокумент7 страницCriterio RuthFranco Cortez Bobadilla-bergkampОценок пока нет
- Estabilidad y LGR PDFДокумент38 страницEstabilidad y LGR PDFJorge Carlos Mogollon RojasОценок пока нет
- Análisis de SensibilidadДокумент5 страницAnálisis de SensibilidadLuis SaenzОценок пока нет
- Circuito ElectricoДокумент3 страницыCircuito ElectricoLuis SaenzОценок пока нет
- Laboratorio N°4 Analisis de CircuitosДокумент10 страницLaboratorio N°4 Analisis de CircuitosLuis SaenzОценок пока нет
- Dialogo Social en Las EmpresasДокумент2 страницыDialogo Social en Las EmpresasLuis SaenzОценок пока нет
- Ejercicios de Razones Trigonométricas para Cuarto de SecundariaДокумент4 страницыEjercicios de Razones Trigonométricas para Cuarto de Secundariawawa ñaupa ricraОценок пока нет
- GuiasДокумент11 страницGuiasTeresa Torres0% (1)
- Introduccion A La Teoria de Numeros PDFДокумент14 страницIntroduccion A La Teoria de Numeros PDFSebastián EgeaОценок пока нет
- Guia 1er Ano 2017 MatematicaДокумент74 страницыGuia 1er Ano 2017 MatematicahernanОценок пока нет
- Combinatoria IVДокумент11 страницCombinatoria IVAntonio LMОценок пока нет
- TP1 2021Документ6 страницTP1 2021Lorena AlvarezОценок пока нет
- Matematicas Sexto 10Документ3 страницыMatematicas Sexto 10Samari Molina AcuñaОценок пока нет
- Ev Figuras TridimensionalesДокумент6 страницEv Figuras TridimensionalesmarcoОценок пока нет
- Elementos Básicos de La GeometríaДокумент38 страницElementos Básicos de La GeometríaRicardo Morales HernandezОценок пока нет
- Problemas Regla de 3Документ32 страницыProblemas Regla de 3Anonymous xKh01YjОценок пока нет
- Psicotécnicos C 1Документ12 страницPsicotécnicos C 1adrian lopez romeroОценок пока нет
- Examen Final Algebra y Trigono Metria Unad 2017 I PDFДокумент10 страницExamen Final Algebra y Trigono Metria Unad 2017 I PDFJORGE PACHECO50% (4)
- Coordenadas RectangularesДокумент33 страницыCoordenadas RectangularesdavisdeyОценок пока нет
- Probab I Lida DesДокумент19 страницProbab I Lida DesAugusto VacaОценок пока нет
- Estudiantes: Johnny Jara Olivares: M N M N M NДокумент5 страницEstudiantes: Johnny Jara Olivares: M N M N M Njohnny jara olivaresОценок пока нет
- Una Identidad Trigonométrica Es Una Igualdad Entre Expresiones Que Contienen Funciones Trigonométricas y Es Válida para Todos Los Valores Del Ángulo en Los Que Están Definidas Las FuncionesДокумент11 страницUna Identidad Trigonométrica Es Una Igualdad Entre Expresiones Que Contienen Funciones Trigonométricas y Es Válida para Todos Los Valores Del Ángulo en Los Que Están Definidas Las FuncionesEduardo PantingОценок пока нет
- Sem 2 UNI PARALELO 2022 - AthenasДокумент29 страницSem 2 UNI PARALELO 2022 - AthenasDarío Vidal VílchezОценок пока нет
- GeoДокумент13 страницGeoLuis Nelson Guevara PerezОценок пока нет
- Bimestral Matematicas ResueltaДокумент1 страницаBimestral Matematicas ResueltaDiose Castillara100% (1)
- Triangulos OblicuangulosДокумент13 страницTriangulos Oblicuangulos01. Aguilar Celaya PerlaОценок пока нет
- Aritmetica - 10 - PorcentajesДокумент3 страницыAritmetica - 10 - PorcentajesSonny Sanchez PerezОценок пока нет
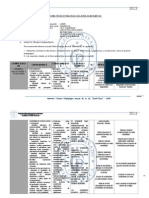
- Informe Técnico Pedagógico Del Área de Matemática - BasicoДокумент6 страницInforme Técnico Pedagógico Del Área de Matemática - BasicoRonald AvilaОценок пока нет
- Libro de Trigonometria de La AgrariaДокумент12 страницLibro de Trigonometria de La AgrariaCamila Helena Arevalo PeraltaОценок пока нет
- GeoGebra - Polígonos y CircunferenciasДокумент4 страницыGeoGebra - Polígonos y CircunferenciasgrupodetrabajoОценок пока нет
- EJERCICIOS Solucion TEMA5 CombinatoriaДокумент15 страницEJERCICIOS Solucion TEMA5 Combinatoriasunilda mosqueraОценок пока нет
- Problemas Resueltos de Calculo IntegralДокумент30 страницProblemas Resueltos de Calculo IntegralSaulxito Cueva Santos Smc100% (1)
- Aritmetica - 1er Año - II Bimestre - 2013Документ8 страницAritmetica - 1er Año - II Bimestre - 2013theone27100% (3)
- Planos Tangentes Rectas Normales A La SuperficieДокумент18 страницPlanos Tangentes Rectas Normales A La SuperficieAMYNNXXXX90% (10)
- Anexo 03Документ4 страницыAnexo 03Luz StelaОценок пока нет