Вам также может понравиться
- Mantenimiento de sistemas de seguridad y de apoyo a la conducción. TMVG0209От EverandMantenimiento de sistemas de seguridad y de apoyo a la conducción. TMVG0209Рейтинг: 5 из 5 звезд5/5 (3)
- Manual SutstructorДокумент14 страницManual SutstructorAlexander AderlyОценок пока нет
- Diseño Mecánico PruebaДокумент16 страницDiseño Mecánico PruebaOlger Baño TuquerresОценок пока нет
- Ingeniería de Fabricación ResumenДокумент50 страницIngeniería de Fabricación ResumenVíctor Balló VelaОценок пока нет
- Modalidad Y Simulacion Sistemas Mecatronicos: Actividad 1. Diseño de Un Chasis y Dirección de Un Carro ElectronicoДокумент23 страницыModalidad Y Simulacion Sistemas Mecatronicos: Actividad 1. Diseño de Un Chasis y Dirección de Un Carro ElectronicoAlexis EspinosaОценок пока нет
- Unidad II - Sistemas LubricaciónДокумент54 страницыUnidad II - Sistemas LubricaciónFranciscoОценок пока нет
- Maquinas HerramientasДокумент69 страницMaquinas HerramientasDaniel SabinoОценок пока нет
- Practica3 Estabilidad Respuesta en FrecuenciaДокумент15 страницPractica3 Estabilidad Respuesta en FrecuenciaIbrahim Xaca ZepedaОценок пока нет
- Cinematicay DinamicaДокумент5 страницCinematicay DinamicaRaul Gonzalez100% (1)
- (I) Elementos Constructivos en Los MCIAДокумент32 страницы(I) Elementos Constructivos en Los MCIAVicente Padilla100% (1)
- Trabajo Final de Grado Javier Jane Verdu-1 PDFДокумент93 страницыTrabajo Final de Grado Javier Jane Verdu-1 PDFManuela Gallego ArangoОценок пока нет
- Aero CrespoДокумент115 страницAero CrespoJafet BarreraОценок пока нет
- Diseño - Capitulo 1. Fundamentos para El DiseñoДокумент14 страницDiseño - Capitulo 1. Fundamentos para El DiseñoPaul Illescas100% (1)
- Practica 1 VernierДокумент6 страницPractica 1 VernierÁngel Ayala NonatoОценок пока нет
- Exámenes Aleaciones AeroespacialesДокумент40 страницExámenes Aleaciones Aeroespacialessamarsil100% (2)
- Informe Investigativo-Flexion de Elementos CurvosДокумент18 страницInforme Investigativo-Flexion de Elementos CurvosLopez BrayanОценок пока нет
- Esquema Integral en Una Planta IndustrialДокумент15 страницEsquema Integral en Una Planta IndustrialEdgar DomínguezОценок пока нет
- Informe 2 CNCДокумент5 страницInforme 2 CNCdairux9216Оценок пока нет
- Elementos Unidimensionales - BarrasДокумент50 страницElementos Unidimensionales - BarrasCriaderoHnosBarreraBucayОценок пока нет
- Acoplamientos y LevasДокумент21 страницаAcoplamientos y LevasDonald Askeland PhuleОценок пока нет
- Wings en EsДокумент15 страницWings en EsShirley CruzОценок пока нет
- Modos de FallaДокумент7 страницModos de FallaEmmanuel Cardoza CarrascoОценок пока нет
- 3-CáLculo de EstabilidadДокумент58 страниц3-CáLculo de EstabilidadFelipe PanОценок пока нет
- Método Grafico de CremonaДокумент4 страницыMétodo Grafico de CremonaLuis Alfredo Curasi TrujillanoОценок пока нет
- W.Herrera Trabajo de Suficiencia Profesional Titulo Profesional 2021Документ112 страницW.Herrera Trabajo de Suficiencia Profesional Titulo Profesional 2021Wow MusicОценок пока нет
- CyM 11 - Estabilidad y ControlДокумент36 страницCyM 11 - Estabilidad y ControlDiego González RedondoОценок пока нет
- Concepto Geométrico Del Perfil AlarДокумент9 страницConcepto Geométrico Del Perfil AlarJhonny RosalesОценок пока нет
- Vibraciones MecanicasДокумент25 страницVibraciones MecanicasDeAbreuJsgОценок пока нет
- Análisis de Elementos Finitos de Un Modelo Básico de Aeronave en Patran-NastranДокумент19 страницAnálisis de Elementos Finitos de Un Modelo Básico de Aeronave en Patran-NastranRafaelff100% (1)
- Teoría de MaquinasДокумент10 страницTeoría de MaquinasGiss CorreaОценок пока нет
- Cátedra: Elementos de Máquinas U.T.N Facultad Regional Mendoza Ing. Miguel Angel Mattolini Cinemática de Engranajes - Ejes ParalelosДокумент25 страницCátedra: Elementos de Máquinas U.T.N Facultad Regional Mendoza Ing. Miguel Angel Mattolini Cinemática de Engranajes - Ejes ParalelosRenzo GonzalezОценок пока нет
- Teoria de Estructuras PDFДокумент8 страницTeoria de Estructuras PDFDeimos StarkОценок пока нет
- Teoria de Falla para Tornillos Roscado y Uniones Del MarcoДокумент6 страницTeoria de Falla para Tornillos Roscado y Uniones Del MarcoAlejandro Solano MОценок пока нет
- LabNo5 Curvas Del Acoplador MecanismoДокумент7 страницLabNo5 Curvas Del Acoplador MecanismoEstefaniPanLiuОценок пока нет
- Prueba DiagnosticaДокумент2 страницыPrueba DiagnosticaSixto Alvarado SullcaОценок пока нет
- ProyectoДокумент6 страницProyectoSheryl100% (1)
- Solucion Actividad 1Документ3 страницыSolucion Actividad 1camilo escobarОценок пока нет
- Claces de Tig, Mig Mag UNCPДокумент15 страницClaces de Tig, Mig Mag UNCPJorge CamposОценок пока нет
- Diagramas Q-M-NДокумент8 страницDiagramas Q-M-NAnonymous jt1gNLfОценок пока нет
- Accidentes Causados Por CorrosionДокумент6 страницAccidentes Causados Por CorrosionValdez Camacho Nayeli MishelОценок пока нет
- Cuadro Comparativo HelicopterosДокумент2 страницыCuadro Comparativo HelicopterosJuan Pablo AriasОценок пока нет
- Practico 2 Resistencia de MaterialesДокумент7 страницPractico 2 Resistencia de Materialesacronimus1Оценок пока нет
- Diagrama de RestriccionesДокумент13 страницDiagrama de RestriccionessarrpaОценок пока нет
- Brazo Robotico IEEE (Corregido)Документ10 страницBrazo Robotico IEEE (Corregido)Camilo CorredorОценок пока нет
- Manufactura PracticaДокумент6 страницManufactura PracticaAxel RocaОценок пока нет
- 9 Practica de Limadora - Taller BasicoДокумент18 страниц9 Practica de Limadora - Taller BasicoXavier Mantilla Morán0% (1)
- Monografia GrupalДокумент14 страницMonografia GrupalGinaОценок пока нет
- Tolerancias GeometricasДокумент30 страницTolerancias GeometricasVictor Rosales Martinez100% (2)
- Un Avión Acrobático Vuela en Posición Invertida Sobre El Nivel Del Mar y Con Una Velocidad Constante Igual A 110 MДокумент4 страницыUn Avión Acrobático Vuela en Posición Invertida Sobre El Nivel Del Mar y Con Una Velocidad Constante Igual A 110 MXavier Diaz100% (1)
- Microscopio MetrologicoДокумент21 страницаMicroscopio MetrologicoAdal Villamizar MayorgaОценок пока нет
- Fundamentos de MecanismosДокумент8 страницFundamentos de MecanismosDaniel GarciaОценок пока нет
- RESUMEN Investigación de La FAA Sobre El Envejecimiento en Los AvionesДокумент12 страницRESUMEN Investigación de La FAA Sobre El Envejecimiento en Los AvionesAngel FariasОценок пока нет
- Capitulo 7 Flexion Lateral. PandeoДокумент18 страницCapitulo 7 Flexion Lateral. Pandeoalex ro100% (1)
- TAREA 2 Estatica 02 2018Документ5 страницTAREA 2 Estatica 02 2018Oscar MejíaОценок пока нет
- Telerruptor 21 23Документ56 страницTelerruptor 21 23Odin Sangre de CromОценок пока нет
- Reticulados 2012Документ18 страницReticulados 2012Carlos ParedesОценок пока нет
- Características de Las Plaquitas InsertablesДокумент3 страницыCaracterísticas de Las Plaquitas InsertablesIrving Melgar AldamaОценок пока нет
- Formato Fisica DronДокумент20 страницFormato Fisica DronB David Street SkateОценок пока нет
- Partes de Un Dron y Lo Ultimo en DronesДокумент13 страницPartes de Un Dron y Lo Ultimo en DronesYuliana TorresОценок пока нет
- Manual Del DronДокумент14 страницManual Del Drongallegosantony2003Оценок пока нет
- Funcion de Transferencia - SegwayДокумент3 страницыFuncion de Transferencia - SegwaysagitarioefrainОценок пока нет
- OaciДокумент11 страницOacisagitarioefrainОценок пока нет
- Ensayo Sobre El PerdónДокумент1 страницаEnsayo Sobre El PerdónsagitarioefrainОценок пока нет
- Tipos de Cámaras de CombustiónДокумент3 страницыTipos de Cámaras de CombustiónsagitarioefrainОценок пока нет
- Ejercicios 3 Ley de MendelДокумент1 страницаEjercicios 3 Ley de MendelDiego AgudeloОценок пока нет
- Pae Pediatria (Autoguardado)Документ20 страницPae Pediatria (Autoguardado)Rudy GuarnizОценок пока нет
- Auditoría Interna en Seguridad y Salud en El TrabajoДокумент8 страницAuditoría Interna en Seguridad y Salud en El TrabajoSOLUCIONES SERVICIOS Y SUMINISTRO S.A.S.Оценок пока нет
- MODULO 1 Cap 0 INTRODUCCION DE FACILIDADES DE PRODUCCIONДокумент37 страницMODULO 1 Cap 0 INTRODUCCION DE FACILIDADES DE PRODUCCIONMarco Antonio Torrez Ibarra100% (1)
- Penafiel - Victor - Consulta1 MetrologiaДокумент4 страницыPenafiel - Victor - Consulta1 MetrologiaVictor J. PeñafielОценок пока нет
- Apuntes Diseño de Plantas IДокумент7 страницApuntes Diseño de Plantas ImiguelОценок пока нет
- CIJ (1969), Caso de La Plataforma Continental Del Mar Del Norte (Alemania V Dinamarca y Países Bajos) - Resumen PDFДокумент4 страницыCIJ (1969), Caso de La Plataforma Continental Del Mar Del Norte (Alemania V Dinamarca y Países Bajos) - Resumen PDFANDREA SOFIA CORDOVA LUNGCHINGОценок пока нет
- Guía Diagnostica y Nivelatoria Biologia 8 (Abcd) (5851)Документ6 страницGuía Diagnostica y Nivelatoria Biologia 8 (Abcd) (5851)jair padillaОценок пока нет
- 21practica de Mezcla de GasesДокумент2 страницы21practica de Mezcla de GasesRICHIОценок пока нет
- Movilidad UrbanaДокумент6 страницMovilidad UrbanaJorge Ventura MansillaОценок пока нет
- Calculo VectorialДокумент90 страницCalculo Vectorialluxini36Оценок пока нет
- Pastos y Forrajes 6Документ63 страницыPastos y Forrajes 6Anccas Wil AnccasОценок пока нет
- Cirugía Oral, Caninos IncluidosДокумент3 страницыCirugía Oral, Caninos IncluidosPriya SJОценок пока нет
- Preguntas de La 1 A La 51 Con RespuestasДокумент12 страницPreguntas de La 1 A La 51 Con RespuestasMaría FdezОценок пока нет
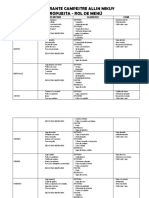
- Propuesta - Rol de MenúДокумент3 страницыPropuesta - Rol de MenúAnonymous 7VCRJYCPОценок пока нет
- Por Qué No Hay Serpientes en IrlandaДокумент23 страницыPor Qué No Hay Serpientes en IrlandaRodrigoОценок пока нет
- Aldehídos y Cetonas - 2020Документ22 страницыAldehídos y Cetonas - 2020Jaime Leal NavarroОценок пока нет
- Tema 5 - El Arte RománicoДокумент7 страницTema 5 - El Arte Románico사내Оценок пока нет
- Circuito de Entrenamiento de 8 Estaciones A Tiempo FijoДокумент10 страницCircuito de Entrenamiento de 8 Estaciones A Tiempo FijoAlexander Brooks54% (13)
- SEMINARIO Escala de ValoresДокумент3 страницыSEMINARIO Escala de ValoresDanny AraqueОценок пока нет
- Metros Flexografia y RefiladoДокумент2 страницыMetros Flexografia y Refiladojguillermo91Оценок пока нет
- FISH!, Parte 1 de 5Документ10 страницFISH!, Parte 1 de 5Yussell MontalvoОценок пока нет
- Banco de Proveedores ActualДокумент884 страницыBanco de Proveedores ActualKatherine HernandezОценок пока нет
- Un Montón de Imágenes RotasДокумент3 страницыUn Montón de Imágenes RotasClaudia MammanaОценок пока нет
- Desarrollo de Sesiones - Bartender N1Документ2 страницыDesarrollo de Sesiones - Bartender N1Daniel EstremadoyroОценок пока нет
- Producto Final AsignaturaДокумент37 страницProducto Final AsignaturaMinerva RodríguezОценок пока нет
- Práctica #7 - Reacciones QuímicasДокумент9 страницPráctica #7 - Reacciones QuímicasJORGE0% (1)
- V64-V65 Esp 1 PDFДокумент8 страницV64-V65 Esp 1 PDFRafael BrunoОценок пока нет
- Memoria Descriptiva YanamaДокумент15 страницMemoria Descriptiva YanamaJohanWongОценок пока нет
- Radicales AlquiloДокумент7 страницRadicales AlquiloAlan Contreras100% (1)