Вам также может понравиться
- Unit 1 QAДокумент26 страницUnit 1 QAanbuelectricalОценок пока нет
- Teaching PlanДокумент3 страницыTeaching PlananbuelectricalОценок пока нет
- Unit Ii SRM QaДокумент21 страницаUnit Ii SRM QaanbuelectricalОценок пока нет
- Unit III Permanent Magnet Brushless DC MotorsДокумент3 страницыUnit III Permanent Magnet Brushless DC MotorsanbuelectricalОценок пока нет
- All QPДокумент3 страницыAll QPanbuelectricalОценок пока нет
- Pages From 336 - O17 - CRДокумент14 страницPages From 336 - O17 - CRanbuelectricalОценок пока нет
- Pages From 336 - A19 - CRДокумент15 страницPages From 336 - A19 - CRanbuelectricalОценок пока нет
- All QuestionДокумент3 страницыAll QuestionanbuelectricalОценок пока нет
- Termwork Proforma1Документ1 страницаTermwork Proforma1anbuelectricalОценок пока нет
- Pages From 336 - O16 - CRДокумент14 страницPages From 336 - O16 - CRanbuelectricalОценок пока нет
- Department of Electrical and Electronics Engineering: PlacementДокумент3 страницыDepartment of Electrical and Electronics Engineering: PlacementanbuelectricalОценок пока нет
- தந்தை ரோவர் பாலிடெக்னிக் கல்லூரி1Документ2 страницыதந்தை ரோவர் பாலிடெக்னிக் கல்லூரி1anbuelectricalОценок пока нет
- Annual Day Sports Day BudgetДокумент3 страницыAnnual Day Sports Day Budgetanbuelectrical50% (2)
- 336 Roever April2020 ExamДокумент1 страница336 Roever April2020 ExamanbuelectricalОценок пока нет
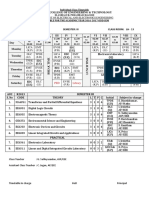
- Thanthai Roever Institute of Polytechnic College: Progress Through TechnologyДокумент1 страницаThanthai Roever Institute of Polytechnic College: Progress Through TechnologyanbuelectricalОценок пока нет
- Dote LetterДокумент119 страницDote LetteranbuelectricalОценок пока нет
- 6TH SEM - NewlinkДокумент3 страницы6TH SEM - NewlinkanbuelectricalОценок пока нет
- Gap Analysis Tool For Determining Continuing EducationДокумент2 страницыGap Analysis Tool For Determining Continuing EducationanbuelectricalОценок пока нет
- Chemplast Sanmar Limited, Mettur, SalemДокумент1 страницаChemplast Sanmar Limited, Mettur, SalemanbuelectricalОценок пока нет
- 336 ProjectcommitteeДокумент17 страниц336 ProjectcommitteeanbuelectricalОценок пока нет
- Electrical MaintenanceДокумент4 страницыElectrical MaintenanceanbuelectricalОценок пока нет
- Power Electronics SyllabusДокумент5 страницPower Electronics SyllabusanbuelectricalОценок пока нет
- List Files DeptДокумент2 страницыList Files DeptanbuelectricalОценок пока нет
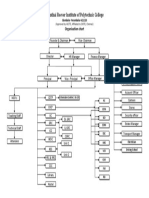
- Thanthai Roever Institute of Polytechnic College: Organisation ChartДокумент1 страницаThanthai Roever Institute of Polytechnic College: Organisation ChartanbuelectricalОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cooper - Bussmann-BK - 9435-1 - 2-Datasheet (See Page No 124) - CompressedДокумент280 страницCooper - Bussmann-BK - 9435-1 - 2-Datasheet (See Page No 124) - CompressedAntonio CardosoОценок пока нет
- Clap Switch PresentationДокумент39 страницClap Switch Presentationghaza0070% (2)
- JLCPCB SMT Parts Library (20210104)Документ1 826 страницJLCPCB SMT Parts Library (20210104)anoushes1Оценок пока нет
- NSX-SZ50 - 2 PDFДокумент36 страницNSX-SZ50 - 2 PDFgnjida100% (1)
- 7UM62 Manual AC V991200 en PDFДокумент678 страниц7UM62 Manual AC V991200 en PDFJuan100% (1)
- VSD ManualДокумент317 страницVSD Manualfernando Hurtado100% (1)
- Wiring Diagrams of PLC and DCS Systems - DI, DO, AI, AOДокумент1 страницаWiring Diagrams of PLC and DCS Systems - DI, DO, AI, AODani FayçalОценок пока нет
- Deep Sea Electronics: Typical Wiring Diagram DSE8660 MKII Installation InstructionsДокумент2 страницыDeep Sea Electronics: Typical Wiring Diagram DSE8660 MKII Installation InstructionsElias Herrera Ceron0% (1)
- Neet 2021 Physics Paper With SolutionДокумент13 страницNeet 2021 Physics Paper With SolutionAnilОценок пока нет
- Introduction of HTLS ConductorsДокумент37 страницIntroduction of HTLS ConductorsAshish MaheshwariОценок пока нет
- Relé DatasheetДокумент2 страницыRelé DatasheetJosé OliveiraОценок пока нет
- Daewoo RD-430 PDFДокумент62 страницыDaewoo RD-430 PDFNoe TunОценок пока нет
- Annexure - I SYLLABUS For Test (POST - Assistant Engineer/ Electrical), Now Re-Designated As Assistant Executive Engineer/ ElectricalДокумент2 страницыAnnexure - I SYLLABUS For Test (POST - Assistant Engineer/ Electrical), Now Re-Designated As Assistant Executive Engineer/ ElectricalSowmyaОценок пока нет
- Effective ApertureДокумент10 страницEffective ApertureLeo HambirepiОценок пока нет
- PAG 11.2 - Determining Specific Heat CapacityДокумент3 страницыPAG 11.2 - Determining Specific Heat CapacityjmsonlОценок пока нет
- Ensto Voltage Controller: Answer For Today S Power Quality ProblemsДокумент6 страницEnsto Voltage Controller: Answer For Today S Power Quality ProblemsTBS Máy Phát ĐiệnОценок пока нет
- 2018, - Altair - Multi-Physics Electric Motor Optimization For Noise ReductionДокумент5 страниц2018, - Altair - Multi-Physics Electric Motor Optimization For Noise ReductionburchandadiОценок пока нет
- Silergy Corp SY8213FCC - C178246Документ9 страницSilergy Corp SY8213FCC - C178246Thai LamОценок пока нет
- Bite Controller For ESM Systems Controller For ESM SystemsДокумент7 страницBite Controller For ESM Systems Controller For ESM Systemsmelkore99Оценок пока нет
- Fronius Ig PV Inverter: Technical Data SheetДокумент2 страницыFronius Ig PV Inverter: Technical Data Sheetfarani87Оценок пока нет
- Chap002 - CH2 Solution of Power Electronics by Daniel W.Hart Chap002 - CH2 Solution of Power Electronics by Daniel W.HartДокумент26 страницChap002 - CH2 Solution of Power Electronics by Daniel W.Hart Chap002 - CH2 Solution of Power Electronics by Daniel W.HarthassanОценок пока нет
- Wound Rotor Motor TestingДокумент5 страницWound Rotor Motor Testingbige1911Оценок пока нет
- Multimeter 2007Документ29 страницMultimeter 2007samia100% (3)
- D8T MLN Electrical SchematicДокумент43 страницыD8T MLN Electrical SchematicRyanОценок пока нет
- 20n60a4s9a 600V 20a PDFДокумент8 страниц20n60a4s9a 600V 20a PDFfunpinochioОценок пока нет
- MTP3403N3Документ5 страницMTP3403N3freddyОценок пока нет
- Procedure For Wafer-Level DCДокумент32 страницыProcedure For Wafer-Level DCMirnaОценок пока нет
- Time Delay Photo Flasch Trigger (Silicon - Chip - 2009-02)Документ13 страницTime Delay Photo Flasch Trigger (Silicon - Chip - 2009-02)Peeters GuyОценок пока нет
- Datasheet SEN0240 PDFДокумент10 страницDatasheet SEN0240 PDFArmando Lopez HernandezОценок пока нет
- T512-5047 Manual PDFДокумент20 страницT512-5047 Manual PDFelectronico1000Оценок пока нет