Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Ieee Argencon 2016 Paper 89Документ5 страницIeee Argencon 2016 Paper 89ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 94Документ6 страницIeee Argencon 2016 Paper 94ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 74Документ7 страницIeee Argencon 2016 Paper 74ademargcjunior100% (1)
- 2012 - Solar Generation Prediction Using The ARMA Model in A Laboratory-Level Micro-GridДокумент6 страниц2012 - Solar Generation Prediction Using The ARMA Model in A Laboratory-Level Micro-GridademargcjuniorОценок пока нет
- Causal and Non-Causal Entropy Quantifiers Implemented in FPGAДокумент5 страницCausal and Non-Causal Entropy Quantifiers Implemented in FPGAademargcjuniorОценок пока нет
- Analysis and Emulation of A Photovoltaic Solar System Using A MATLAB/Simulink Model and The DS1104 UnitДокумент6 страницAnalysis and Emulation of A Photovoltaic Solar System Using A MATLAB/Simulink Model and The DS1104 UnitademargcjuniorОценок пока нет
- Covert Channel Sobre SSL Heartbeat: Luis A. Catanzariti y Nestor MasnattaДокумент6 страницCovert Channel Sobre SSL Heartbeat: Luis A. Catanzariti y Nestor MasnattaademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 19Документ7 страницIeee Argencon 2016 Paper 19ademargcjuniorОценок пока нет
- Numerical Study of The Unsteady Aerodynamics of Rotating SeedsДокумент6 страницNumerical Study of The Unsteady Aerodynamics of Rotating SeedsademargcjuniorОценок пока нет
- Localizador de Fuente Sonora Basado en Red Inal Ambrica de SensoresДокумент6 страницLocalizador de Fuente Sonora Basado en Red Inal Ambrica de SensoresademargcjuniorОценок пока нет
- 1998 - Control Experiments and What I Learned From Them - A Personal JourneyДокумент8 страниц1998 - Control Experiments and What I Learned From Them - A Personal JourneyademargcjuniorОценок пока нет
- An Analysis of Recurrent Neural Networks For Botnet Detection BehaviorДокумент6 страницAn Analysis of Recurrent Neural Networks For Botnet Detection BehaviorademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 30Документ6 страницIeee Argencon 2016 Paper 30ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 9Документ6 страницIeee Argencon 2016 Paper 9ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 8Документ6 страницIeee Argencon 2016 Paper 8ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 14Документ6 страницIeee Argencon 2016 Paper 14ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 5Документ6 страницIeee Argencon 2016 Paper 5ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 12Документ4 страницыIeee Argencon 2016 Paper 12ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 11Документ6 страницIeee Argencon 2016 Paper 11ademargcjuniorОценок пока нет
- 2008 - Uso Eficiente de Energia No Setor Hospitalar - Hospitais PúblicosДокумент13 страниц2008 - Uso Eficiente de Energia No Setor Hospitalar - Hospitais PúblicosademargcjuniorОценок пока нет
- 1995 - Single-Loop Controllers Bring Boilers in LineДокумент2 страницы1995 - Single-Loop Controllers Bring Boilers in LineademargcjuniorОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Sammuel Augusto Gomes MachadoДокумент2 страницыSammuel Augusto Gomes MachadoSam MachadoОценок пока нет
- TutorialsДокумент17 страницTutorialsnandini chinthalaОценок пока нет
- DC Inverter Multi-System Air ConditionerДокумент122 страницыDC Inverter Multi-System Air ConditionerSergio ReyesОценок пока нет
- Nursing InformaticsДокумент7 страницNursing Informaticsapi-19880840100% (1)
- Delta Series FiltersДокумент12 страницDelta Series Filtersgiovanni1912Оценок пока нет
- Bova Futura Electrical System ManualДокумент40 страницBova Futura Electrical System ManualmagzigioОценок пока нет
- SRAN13.1&15.0 NSA Networking Based On EPC-20180905Документ24 страницыSRAN13.1&15.0 NSA Networking Based On EPC-20180905Mohammed Babar Ahmed100% (2)
- Samco CarryallДокумент4 страницыSamco CarryallbillОценок пока нет
- Alexa Howell: EducationДокумент1 страницаAlexa Howell: EducationAlexaОценок пока нет
- Endress-Hauser Cerabar S PMP71 PTДокумент7 страницEndress-Hauser Cerabar S PMP71 PTCleiton MonicoОценок пока нет
- Connecting To The Internet With Pico WДокумент30 страницConnecting To The Internet With Pico WKnut BoergeОценок пока нет
- Development of An Android-Based Visual ImplementatДокумент8 страницDevelopment of An Android-Based Visual ImplementatChidera EkeuhieОценок пока нет
- Comsol PricelistДокумент4 страницыComsol PricelistKalipada SenОценок пока нет
- Frizz Dual ManualДокумент2 страницыFrizz Dual ManualManuel Francisco de PereaОценок пока нет
- Zd30 Ecu PinoutsДокумент10 страницZd30 Ecu PinoutsKinaryoОценок пока нет
- 1997 UBC Vol 2Документ501 страница1997 UBC Vol 2Ali KaroutОценок пока нет
- Methods, Processes and Equipment Involved in Manufacturing of PlasticДокумент34 страницыMethods, Processes and Equipment Involved in Manufacturing of PlasticNiño Gerard JabagatОценок пока нет
- ENG DS OSA Series Relay Data Sheet E 0411Документ3 страницыENG DS OSA Series Relay Data Sheet E 0411Klisman Rafael Santi RamosОценок пока нет
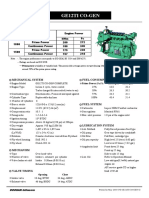
- Ge12ti Co Gen-GДокумент2 страницыGe12ti Co Gen-GTilok DasОценок пока нет
- 05a1 E70 Central Locking PDFДокумент19 страниц05a1 E70 Central Locking PDFMozes SimataaОценок пока нет
- Module 1 Introduction To ElectronicsДокумент4 страницыModule 1 Introduction To ElectronicsAldrin VillanuevaОценок пока нет
- As 2159 2009 Piling Design and InstallationДокумент9 страницAs 2159 2009 Piling Design and InstallationKinson LowОценок пока нет
- Zero Cross90003138AДокумент11 страницZero Cross90003138AJeremiasPereiraОценок пока нет
- Help CenterДокумент4 страницыHelp CenterShivali VermaОценок пока нет
- E-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFДокумент11 страницE-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFThamirisAgmОценок пока нет
- GUIDE TO AUTOCAD BASICS 2d PlanningДокумент38 страницGUIDE TO AUTOCAD BASICS 2d PlanningJohn Nichole Hernandez DacanayОценок пока нет
- Week3 Modulation BasicsДокумент30 страницWeek3 Modulation BasicsAbdulrahman AlsomaliОценок пока нет
- Hp81110a ImpulsatoreДокумент132 страницыHp81110a Impulsatorejack11rossiОценок пока нет
- CV - Qian YihaoДокумент19 страницCV - Qian Yihaodestri_742053763Оценок пока нет
- Book IELTS Test Online Booking WizardДокумент4 страницыBook IELTS Test Online Booking WizardNilza BackesОценок пока нет