Вам также может понравиться
- Preguntas de Biología - parteFINALДокумент11 страницPreguntas de Biología - parteFINALLuis AguilarОценок пока нет
- Refranes en PictogramasДокумент2 страницыRefranes en PictogramasLuis AguilarОценок пока нет
- Portafoleo Digital Vanessa Aguilar 3 Ro AДокумент13 страницPortafoleo Digital Vanessa Aguilar 3 Ro ALuis AguilarОценок пока нет
- Portafoleo Digital Vanessa Aguilar 3 Ro AДокумент13 страницPortafoleo Digital Vanessa Aguilar 3 Ro ALuis AguilarОценок пока нет
- Tubo PiezometricoДокумент3 страницыTubo Piezometricotopu2345Оценок пока нет
- E10 Manual ES Equipo GracoДокумент63 страницыE10 Manual ES Equipo Gracojorge_alvarado_34Оценок пока нет
- Pedro PauletДокумент6 страницPedro Pauletbrigith0905Оценок пока нет
- Tema 1 - Buques de Gran CaladoДокумент19 страницTema 1 - Buques de Gran CaladoMarlon SierraОценок пока нет
- Difracción de Rayos XДокумент26 страницDifracción de Rayos XStiven Arredondo SotoОценок пока нет
- Quiz 2 Simulacion - Semana 4 CalificadoДокумент10 страницQuiz 2 Simulacion - Semana 4 CalificadoAura Maria Mendoza100% (16)
- Cosechadora de tomate 40cvДокумент10 страницCosechadora de tomate 40cvMiguelCarmonaОценок пока нет
- FOR-SG-009 Inspeccion Preoperacional ArnesДокумент2 страницыFOR-SG-009 Inspeccion Preoperacional ArnesJULY ROMEROОценок пока нет
- Manual AmplyaДокумент456 страницManual Amplyajosecarlosmaria60% (5)
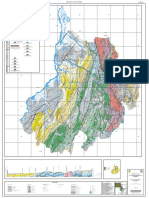
- Mapa Geologico de Santander (1999)Документ1 страницаMapa Geologico de Santander (1999)Fabian Martinez100% (1)
- FrontierДокумент3 страницыFrontiergladiador01100% (1)
- Taller 1 QuimicaДокумент5 страницTaller 1 QuimicaYanet MartínezОценок пока нет
- Diagramas de DespliegueДокумент8 страницDiagramas de DespliegueEduard Stiven Obando GarciaОценок пока нет
- Punto Clave Ej3 LegerДокумент4 страницыPunto Clave Ej3 LegerIng Geranes LegerОценок пока нет
- S04.s1 Excitación DC e HistéresisДокумент23 страницыS04.s1 Excitación DC e HistéresisJordan OreОценок пока нет
- Clase 1Документ22 страницыClase 1Fernanda SaavedraОценок пока нет
- Tempario TallerДокумент7 страницTempario TallerRodolfo Ibarra Machuca100% (5)
- Los Minerales de Un Teléfono Celular. La Patria.Документ6 страницLos Minerales de Un Teléfono Celular. La Patria.enhiОценок пока нет
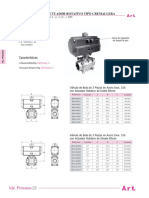
- 08 Valvulas RotativasДокумент5 страниц08 Valvulas RotativascrhijoОценок пока нет
- Cuasicristales y FractalesДокумент3 страницыCuasicristales y FractalesCarlaОценок пока нет
- Sistemas Digitales Aporte 1 EspolДокумент4 страницыSistemas Digitales Aporte 1 EspolFernando VacaОценок пока нет
- Sesion 04 LCD16x2XC8Документ4 страницыSesion 04 LCD16x2XC8Luis Gutierrez MaganОценок пока нет
- Mejoramiento Del Diseño Geométrico de La Trocha CarrozableДокумент22 страницыMejoramiento Del Diseño Geométrico de La Trocha CarrozableShowy AguilaesОценок пока нет
- ASFBVДокумент2 страницыASFBVvictor25cmОценок пока нет
- El Motor Asíncrono-TuverasДокумент51 страницаEl Motor Asíncrono-TuverasJhanmar Alejandro Riveros SánchezОценок пока нет
- TFG Alejandro JiménezДокумент239 страницTFG Alejandro JiménezKevin CastroОценок пока нет
- Mamba NegraДокумент3 страницыMamba NegraDaniela Arrieta33% (3)
- Accesibilidad en Entornos Web InterativosДокумент285 страницAccesibilidad en Entornos Web InterativosIter PosliguaОценок пока нет
- Ajustes y ToleranciasДокумент32 страницыAjustes y ToleranciasMikhael Giordan CAОценок пока нет
- Práctica No 9 SaponificaciònДокумент27 страницPráctica No 9 SaponificaciònEverardo López63% (8)