Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- International Journal of ControlДокумент2 страницыInternational Journal of ControlijcacsОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of ControlДокумент2 страницыInternational Journal of ControlijcacsОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- International Journal of ControlДокумент2 страницыInternational Journal of ControlijcacsОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- IJCACS - CFPДокумент2 страницыIJCACS - CFPijscaiОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The International Journal of Control, Automation, Communication and Systems (IJCACS)Документ3 страницыThe International Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ3 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Call For Papers - International Journal of Control, Automation, Communication and Systems (IJCACS)Документ3 страницыCall For Papers - International Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- ISSN: 2455 - 7889 Scope & Topics: While Being Evaluated For This JournalДокумент2 страницыISSN: 2455 - 7889 Scope & Topics: While Being Evaluated For This JournalijcacsОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ3 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- International Journal of Control Automation Communication and Systems IJCACSДокумент2 страницыInternational Journal of Control Automation Communication and Systems IJCACSijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- The International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыThe International Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control Automation Communication and Systems IJCACSДокумент2 страницыInternational Journal of Control Automation Communication and Systems IJCACSijcacsОценок пока нет
- International Journal of Control, Automation, Communication and Systems (IJCACS)Документ2 страницыInternational Journal of Control, Automation, Communication and Systems (IJCACS)ijcacsОценок пока нет
- International Journal of Control Automation Communication and Systems IJCACSДокумент2 страницыInternational Journal of Control Automation Communication and Systems IJCACSijcacsОценок пока нет
- International Journal of Control Automation Communication and Systems IJCACSДокумент2 страницыInternational Journal of Control Automation Communication and Systems IJCACSijcacsОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- International Journal of Control Automation Communication and Systems IJCACSДокумент2 страницыInternational Journal of Control Automation Communication and Systems IJCACSijcacsОценок пока нет
- International Journal of Control Automation Communication and Systems IJCACSДокумент2 страницыInternational Journal of Control Automation Communication and Systems IJCACSijcacsОценок пока нет
- Epic Story of IbalonДокумент30 страницEpic Story of IbalonKi Ko100% (3)
- Lecture 6Документ7 страницLecture 6Shuja MirОценок пока нет
- Welcome To The Jfrog Artifactory User Guide!Документ3 страницыWelcome To The Jfrog Artifactory User Guide!RaviОценок пока нет
- A Tool For The Assessment of Project Com PDFДокумент9 страницA Tool For The Assessment of Project Com PDFgskodikara2000Оценок пока нет
- Task Basis JurisprudenceДокумент10 страницTask Basis JurisprudenceKerwin LeonidaОценок пока нет
- LET Facilitating Learning EDITED3Документ12 страницLET Facilitating Learning EDITED3Likhaan PerformingArts HomeStudio100% (5)
- Attery: User Guide Dict Release 2020Документ47 страницAttery: User Guide Dict Release 2020diegoОценок пока нет
- Muller-Lyer IllusionДокумент3 страницыMuller-Lyer Illusionsara VermaОценок пока нет
- Ministry of Truth Big Brother Watch 290123Документ106 страницMinistry of Truth Big Brother Watch 290123Valentin ChirilaОценок пока нет
- INTRODUCTIONДокумент1 страницаINTRODUCTIONNabila Gaming09Оценок пока нет
- Advantages and Disadvantages of Global WarmingДокумент11 страницAdvantages and Disadvantages of Global WarmingA Aldika Farlis50% (2)
- RA 9344 As Amended by RA 10630 - HandoutsДокумент9 страницRA 9344 As Amended by RA 10630 - HandoutsJan Re Espina CadeleñaОценок пока нет
- Moon and SaturnДокумент4 страницыMoon and SaturnRamanasarmaОценок пока нет
- Ogayon Vs PeopleДокумент7 страницOgayon Vs PeopleKate CalansinginОценок пока нет
- Grade 5 Forces Acting On Structures and Mechanisms CirriculumДокумент3 страницыGrade 5 Forces Acting On Structures and Mechanisms Cirriculumapi-2072021750% (1)
- In Partial Fulfillment of The Requirements in Care of Older Adult (NCM 114)Документ2 страницыIn Partial Fulfillment of The Requirements in Care of Older Adult (NCM 114)Karen TangОценок пока нет
- Canon Law Eng. Appunti Part 2Документ91 страницаCanon Law Eng. Appunti Part 2noelОценок пока нет
- "Shiksha Se Hi Suraksha": Literacy Campaign WeekДокумент4 страницы"Shiksha Se Hi Suraksha": Literacy Campaign WeekVaishali100% (1)
- Carbon Facial Copies of SlidesДокумент33 страницыCarbon Facial Copies of Slides77yr72cdh6Оценок пока нет
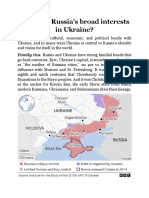
- What Are RussiaДокумент3 страницыWhat Are RussiaMuhammad SufyanОценок пока нет
- MTAP Math ChallengeДокумент5 страницMTAP Math ChallengeHaron Abedin100% (1)
- Entity-Level Controls Fraud QuestionnaireДокумент8 страницEntity-Level Controls Fraud QuestionnaireKirby C. LoberizaОценок пока нет
- Parwati DeviДокумент25 страницParwati DevikvntpcsktprОценок пока нет
- Soal Midtest + Kunci JawabanДокумент28 страницSoal Midtest + Kunci JawabanYuyun RasulongОценок пока нет
- Air Augmented Rocket (285pages) Propulsion ConceptsДокумент285 страницAir Augmented Rocket (285pages) Propulsion ConceptsAlexandre PereiraОценок пока нет
- The Machine StopsДокумент14 страницThe Machine StopsMICHAEL HARRIS USITAОценок пока нет
- Middle Grades ReportДокумент138 страницMiddle Grades ReportcraignewmanОценок пока нет
- Class 12 Accountancy HHДокумент58 страницClass 12 Accountancy HHkomal barotОценок пока нет
- 3er Grado - DMPA 05 - ACTIVIDAD DE COMPRENSION LECTORA - UNIT 2 - CORRECCIONДокумент11 страниц3er Grado - DMPA 05 - ACTIVIDAD DE COMPRENSION LECTORA - UNIT 2 - CORRECCIONANDERSON BRUCE MATIAS DE LA SOTAОценок пока нет
- Chapter Three: Research MethodologyДокумент3 страницыChapter Three: Research MethodologyEng Abdulkadir MahamedОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureОт EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.От EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Рейтинг: 4 из 5 звезд4/5 (5)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!От EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Рейтинг: 4 из 5 звезд4/5 (3)