Вам также может понравиться
- Ieee Argencon 2016 Paper 79Документ7 страницIeee Argencon 2016 Paper 79ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 93Документ5 страницIeee Argencon 2016 Paper 93ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 96Документ5 страницIeee Argencon 2016 Paper 96ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 83Документ6 страницIeee Argencon 2016 Paper 83ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 78Документ7 страницIeee Argencon 2016 Paper 78ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 91Документ6 страницIeee Argencon 2016 Paper 91ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 90Документ6 страницIeee Argencon 2016 Paper 90ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 72Документ6 страницIeee Argencon 2016 Paper 72ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 84Документ6 страницIeee Argencon 2016 Paper 84ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 99Документ6 страницIeee Argencon 2016 Paper 99ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 86Документ6 страницIeee Argencon 2016 Paper 86ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 82Документ6 страницIeee Argencon 2016 Paper 82ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 56Документ6 страницIeee Argencon 2016 Paper 56ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 73Документ5 страницIeee Argencon 2016 Paper 73ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 81Документ7 страницIeee Argencon 2016 Paper 81ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 65Документ6 страницIeee Argencon 2016 Paper 65ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 80Документ3 страницыIeee Argencon 2016 Paper 80ademargcjuniorОценок пока нет
- Diseño de AntenaДокумент5 страницDiseño de Antenaivan padillaОценок пока нет
- Ieee Argencon 2016 Paper 59Документ6 страницIeee Argencon 2016 Paper 59ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 52Документ6 страницIeee Argencon 2016 Paper 52ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 55Документ6 страницIeee Argencon 2016 Paper 55ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 45Документ5 страницIeee Argencon 2016 Paper 45ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 39Документ4 страницыIeee Argencon 2016 Paper 39ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 61Документ5 страницIeee Argencon 2016 Paper 61ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 62Документ7 страницIeee Argencon 2016 Paper 62ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 23Документ6 страницIeee Argencon 2016 Paper 23ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 37Документ5 страницIeee Argencon 2016 Paper 37ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 15Документ6 страницIeee Argencon 2016 Paper 15ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 20Документ6 страницIeee Argencon 2016 Paper 20ademargcjuniorОценок пока нет
- Ieee Argencon 2016 Paper 18Документ5 страницIeee Argencon 2016 Paper 18ademargcjuniorОценок пока нет
- Examen Parcial Curso: Procesos de Manufactura I CODIGO: MC-213 A/B/C Ciclo Academico: 2018 - 1Документ20 страницExamen Parcial Curso: Procesos de Manufactura I CODIGO: MC-213 A/B/C Ciclo Academico: 2018 - 1RicardoОценок пока нет
- Sistemas numéricos: clasificación, propiedades y conversionesДокумент17 страницSistemas numéricos: clasificación, propiedades y conversionesoscar acevedoОценок пока нет
- Ejercicios de EstadísticaДокумент5 страницEjercicios de EstadísticaBenja ARОценок пока нет
- Perspectiva Dentro de CasaДокумент23 страницыPerspectiva Dentro de CasaFer Gamer728Оценок пока нет
- Documento Maestro Accionamientos Oct 12Документ189 страницDocumento Maestro Accionamientos Oct 12Sergio Andres Gomez GarzonОценок пока нет
- Funciones en contextos matemáticosДокумент15 страницFunciones en contextos matemáticossamuel bayonaОценок пока нет
- Modulo II AeromedicinaДокумент83 страницыModulo II Aeromedicinaedgar alberto medina cabrera100% (3)
- Apuntesestadistica 2009Документ180 страницApuntesestadistica 2009Fru Toosie PaloozaОценок пока нет
- Metodos Histoquimicos 1Документ79 страницMetodos Histoquimicos 1ResidentesVE osorio100% (1)
- Texto N° 1 MAGNITUDES FISICASДокумент21 страницаTexto N° 1 MAGNITUDES FISICASJulio Wittersheim OregonОценок пока нет
- EDQM - Paclitaxel - Ficha de SeguridadДокумент6 страницEDQM - Paclitaxel - Ficha de SeguridadleonmontareОценок пока нет
- Cuadro SinopticoДокумент1 страницаCuadro SinopticorafaeleduardocotesОценок пока нет
- Proyecto Tablero Didáctico de AutomatizaciónДокумент15 страницProyecto Tablero Didáctico de Automatizaciónromanfigueroa772Оценок пока нет
- Bebidas CarbonatadasДокумент5 страницBebidas CarbonatadasCarolina RoseroОценок пока нет
- Biología y Geología 3º Eso Práctica 9. Topografía.Документ8 страницBiología y Geología 3º Eso Práctica 9. Topografía.Emilio ViciosoОценок пока нет
- División SinteticaДокумент2 страницыDivisión SinteticaJocelyn Karina Dorantes SolísОценок пока нет
- Matemáticas financieras: Gradientes geométricosДокумент79 страницMatemáticas financieras: Gradientes geométricosmjkoОценок пока нет
- Doblar varilla corrugada: cálculo y característicasДокумент7 страницDoblar varilla corrugada: cálculo y característicasSara AguilarОценок пока нет
- Contenidos Minimos de Un Proyecto de Instalaciones ElectricasДокумент37 страницContenidos Minimos de Un Proyecto de Instalaciones ElectricasBrrt LuisОценок пока нет
- Galileo y su ley de caída libreДокумент1 страницаGalileo y su ley de caída libre•SWEET KOOKIE•Оценок пока нет
- Mio Cine TicaДокумент77 страницMio Cine TicaAnaОценок пока нет
- Guía acústica 11Документ11 страницGuía acústica 11Luisa De La VegaОценок пока нет
- Alcantarillas CuadradasДокумент88 страницAlcantarillas CuadradasJack CanalesОценок пока нет
- Modulo 1Документ17 страницModulo 1Anthony Chavez SotoОценок пока нет
- Taller Tipos InvestigacionДокумент13 страницTaller Tipos InvestigacionOsber FebresОценок пока нет
- Formulario Calculo IДокумент2 страницыFormulario Calculo INatalia LopezОценок пока нет
- Reglas generales de armonía y contrapuntoДокумент32 страницыReglas generales de armonía y contrapuntoMá De Las Quinti100% (2)
- Ficha Tecnica 6v53Документ2 страницыFicha Tecnica 6v53Alonso Fernando100% (7)
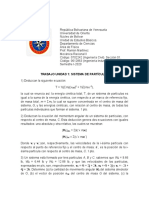
- Udo. Trabajo Unidad 1 Sistema de Partículas Semestre I-2020Документ3 страницыUdo. Trabajo Unidad 1 Sistema de Partículas Semestre I-2020Ramon Martinez ZambranoОценок пока нет
- Tema 4. ComplejosДокумент29 страницTema 4. ComplejosJesús Marcos Segura MartínОценок пока нет