Вам также может понравиться
- Ni-1710 Coding of Technical Engineering Documents PDFДокумент28 страницNi-1710 Coding of Technical Engineering Documents PDFLeonardo SáОценок пока нет
- Offshore StructuresДокумент24 страницыOffshore StructuresSaaiyogeshОценок пока нет
- JacketДокумент41 страницаJacketGarima Verma100% (2)
- Worley Subsea Pipelines Capability ProfileДокумент114 страницWorley Subsea Pipelines Capability Profilelsatchithananthan100% (2)
- 01 Overview of Offshore PlatformДокумент25 страниц01 Overview of Offshore Platformtavis80Оценок пока нет
- Mechanics of Offshore Pipelines, Volume 2: Buckle Propagation and ArrestОт EverandMechanics of Offshore Pipelines, Volume 2: Buckle Propagation and ArrestОценок пока нет
- Offshore and Onshore Rig Cables - 1 PDFДокумент152 страницыOffshore and Onshore Rig Cables - 1 PDFjinyuan74Оценок пока нет
- Technical English 3 (Course Book)Документ52 страницыTechnical English 3 (Course Book)qawsedrfОценок пока нет
- DNV (2001) - Frequency Analysis of Accidental Oil Releases From Fpso Operations in The Gulf of MexicoДокумент155 страницDNV (2001) - Frequency Analysis of Accidental Oil Releases From Fpso Operations in The Gulf of MexicoHossein Zohdi RadОценок пока нет
- Offshore Fixed Platform NotesДокумент37 страницOffshore Fixed Platform NotesAnkushkumar MaliОценок пока нет
- Offshore StructureДокумент35 страницOffshore Structureईन्द्रनील रायОценок пока нет
- Presentation On Different Between Fixed and Floating OffshoreДокумент15 страницPresentation On Different Between Fixed and Floating OffshoreSyamim NecklaceОценок пока нет
- Lect 2 - 2016Документ68 страницLect 2 - 2016raaaaajjjjj100% (1)
- Design of Floating Offshore Platform: January 2021Документ29 страницDesign of Floating Offshore Platform: January 2021vucokt100% (2)
- Offshore PlatformДокумент7 страницOffshore PlatformbaratkumrОценок пока нет
- Functions of A Production PlatformДокумент10 страницFunctions of A Production Platformajwad_hashim5100% (1)
- Design of Offshore PlatformДокумент16 страницDesign of Offshore PlatformMd Azahary100% (1)
- 15A10 - Superstructures I (Topside)Документ23 страницы15A10 - Superstructures I (Topside)Viktor DươngОценок пока нет
- WG 15a Structural Systems - OffshoreДокумент273 страницыWG 15a Structural Systems - OffshoreIlkin hasanovОценок пока нет
- Offshore Structure BasicsДокумент3 страницыOffshore Structure Basicsafi1belle100% (1)
- AccidentalLoading PDFДокумент33 страницыAccidentalLoading PDFscmonline1100% (1)
- Presentation On Offshore Structures and Offshore Engineering DeliverblesДокумент26 страницPresentation On Offshore Structures and Offshore Engineering DeliverblesPartha Sarathi100% (2)
- 2013 Gordeeva Offshore TechnologyДокумент99 страниц2013 Gordeeva Offshore TechnologyMoe LattОценок пока нет
- 5 Guidelines For Struct Integrity Assessment of Existing PlatformsДокумент8 страниц5 Guidelines For Struct Integrity Assessment of Existing Platformssreedevi gummadiОценок пока нет
- Introduction To Subsea Pipe LinesДокумент39 страницIntroduction To Subsea Pipe Linesharshul16100% (1)
- Deepwater Riser InstallationДокумент9 страницDeepwater Riser InstallationekhwanhakimОценок пока нет
- Flexible Riser (Abdul Rahman)Документ5 страницFlexible Riser (Abdul Rahman)Subsea_TeamОценок пока нет
- Lecture 15A.12-Connections in Offshore Deck StructuresДокумент20 страницLecture 15A.12-Connections in Offshore Deck StructuresLinh Tran100% (1)
- Subsea Umbilical, Riser Flowline Installation: National Unversity of SingaporeДокумент39 страницSubsea Umbilical, Riser Flowline Installation: National Unversity of SingaporeYohanest ChandraОценок пока нет
- Oil Platform TypesДокумент2 страницыOil Platform TypesandrejluigiОценок пока нет
- KULIAH Bangunan Lepas Pantai I NOV 6 2009Документ159 страницKULIAH Bangunan Lepas Pantai I NOV 6 2009fauzanhamdaniОценок пока нет
- Offshore Engineering - An OverviewДокумент39 страницOffshore Engineering - An Overviewkharade_a100% (1)
- FINAL Subsea Pipeline Cluster Report 56ppДокумент56 страницFINAL Subsea Pipeline Cluster Report 56ppClement Chima100% (1)
- OffshoreДокумент43 страницыOffshoreSivakumar Karuppanan100% (3)
- Design of Offshore StructuresДокумент29 страницDesign of Offshore StructuresJOSE PRASOBH..JОценок пока нет
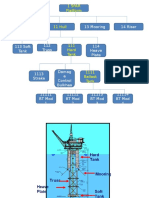
- Lessons From Structural Failures in Offshore Structures and PipelinesДокумент27 страницLessons From Structural Failures in Offshore Structures and Pipelineskristina19910283% (6)
- Fatigue Ocean StructuresДокумент65 страницFatigue Ocean StructureslukmantralalaОценок пока нет
- Tension-Leg Platform (TLP) For PresentДокумент93 страницыTension-Leg Platform (TLP) For PresentMai Kawayapanik100% (3)
- 13 TopsidesДокумент16 страниц13 Topsideshaidar1992Оценок пока нет
- Offshore Engineering and Wave HydrodynamicsДокумент29 страницOffshore Engineering and Wave Hydrodynamicsswe_maniОценок пока нет
- Introduction To Offshore Structures-PART-2Документ22 страницыIntroduction To Offshore Structures-PART-2RUDHRA DHANASEKARОценок пока нет
- OrcaFlex Demonstration IIT MadrasДокумент11 страницOrcaFlex Demonstration IIT MadrasvigambetkarОценок пока нет
- Subsea EngineeringДокумент2 страницыSubsea Engineeringgupta_hemanshu1986252100% (1)
- Design of Fixed Offshore PlatformsДокумент37 страницDesign of Fixed Offshore PlatformsgrahazenОценок пока нет
- Offshore Jacket and PilesДокумент66 страницOffshore Jacket and PilesMurad89Оценок пока нет
- L4-Platform Installation (Compatibility Mode)Документ37 страницL4-Platform Installation (Compatibility Mode)Laxmi Kant PrasadОценок пока нет
- Planning and Construction of Pipelines: © 2003 by CRC Press LLCДокумент3 страницыPlanning and Construction of Pipelines: © 2003 by CRC Press LLCbelil206Оценок пока нет
- Pipeline Presentation PDFДокумент73 страницыPipeline Presentation PDFmohan chand mulpuriОценок пока нет
- Offshore General Introduction AnalysisДокумент28 страницOffshore General Introduction AnalysisOkolo Obinna100% (3)
- Catenary Cation of Cables PDFДокумент153 страницыCatenary Cation of Cables PDFPrashanth Talkad Rajagopal100% (1)
- Structural Integrity Management For Fixed Offshore Platforms in MalaysiaДокумент9 страницStructural Integrity Management For Fixed Offshore Platforms in MalaysiaAzahari AbdullahОценок пока нет
- Offshore Structural Engineering To PMДокумент29 страницOffshore Structural Engineering To PMthongchai_007100% (1)
- Floating Structures - Vol 1 - CH 1Документ56 страницFloating Structures - Vol 1 - CH 1Shailesh ShindeОценок пока нет
- Wall Thickness Calculation of Offshore PipelinesДокумент1 страницаWall Thickness Calculation of Offshore PipelinesAlvin SmithОценок пока нет
- V07a Mooring 1206Документ48 страницV07a Mooring 1206Htin Lin Aung100% (1)
- Design of Offshore StructuresДокумент51 страницаDesign of Offshore StructuresBolarinwa100% (3)
- Offshore JacketДокумент13 страницOffshore Jacketsatishchemeng100% (1)
- Platform InstallationДокумент9 страницPlatform InstallationDianoDeОценок пока нет
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityОт EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityОценок пока нет
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Offshore Structures and Ship Impact Analysis MRT 608Документ17 страницOffshore Structures and Ship Impact Analysis MRT 608Emmanuel Olisa Umenwa100% (2)
- Introduction To Offshore Structures-PART-1Документ22 страницыIntroduction To Offshore Structures-PART-1RUDHRA DHANASEKAR100% (1)
- Field Development ConceptsДокумент54 страницыField Development ConceptsMarc Raphael ParrikalОценок пока нет
- EOE 1 LatestДокумент37 страницEOE 1 LatestSanjitОценок пока нет
- Use of Simplified Structural Models To Predict Dynamic Response To Wave-In-Deck LoadsДокумент7 страницUse of Simplified Structural Models To Predict Dynamic Response To Wave-In-Deck LoadsanandakoeОценок пока нет
- CIVIL BREADTH and STRUCTURAL DEPTH Exam Specifications: Principles and Practice of EngineeringДокумент6 страницCIVIL BREADTH and STRUCTURAL DEPTH Exam Specifications: Principles and Practice of EngineeringanandakoeОценок пока нет
- Sacinp - WHT BH2 JKT InplaceR2Документ1 527 страницSacinp - WHT BH2 JKT InplaceR2anandakoeОценок пока нет
- SaclstДокумент281 страницаSaclstanandakoeОценок пока нет
- Stress Analysis Using ANSYSДокумент20 страницStress Analysis Using ANSYSanandakoeОценок пока нет
- Finite Element Analysis Ii Coursework: Areas of StudyДокумент1 страницаFinite Element Analysis Ii Coursework: Areas of StudyanandakoeОценок пока нет
- Pipe Fea Using AnsysДокумент14 страницPipe Fea Using AnsysanandakoeОценок пока нет
- LECTURE 7: Finite Element Methods in Fracture MechanicsДокумент7 страницLECTURE 7: Finite Element Methods in Fracture MechanicsanandakoeОценок пока нет
- Sea Eye Tiger ROV System: Allied Marine & Equipment Sdn. BHDДокумент1 страницаSea Eye Tiger ROV System: Allied Marine & Equipment Sdn. BHDanandakoeОценок пока нет
- 12 Topsides 13 Mooring 14 Riser: 1 Spar PlatformДокумент2 страницы12 Topsides 13 Mooring 14 Riser: 1 Spar PlatformanandakoeОценок пока нет
- Field Development Plan Project: 1 GovernanceДокумент2 страницыField Development Plan Project: 1 GovernanceanandakoeОценок пока нет
- Tanawin's Bridge Design Assignment: 25 September 2013Документ2 страницыTanawin's Bridge Design Assignment: 25 September 2013anandakoeОценок пока нет
- GHJKДокумент3 страницыGHJKanandakoeОценок пока нет
- Zawtika Project: Blocks M9 and M1: 26 September 2013Документ1 страницаZawtika Project: Blocks M9 and M1: 26 September 2013anandakoeОценок пока нет
- Tanawin's Bridge Design Assignment: 25 September 2013Документ2 страницыTanawin's Bridge Design Assignment: 25 September 2013anandakoeОценок пока нет
- Explosion Deep Oil WellДокумент375 страницExplosion Deep Oil WellVincent J. CataldiОценок пока нет
- EG50R1-2T Subsea Operations-2021Документ37 страницEG50R1-2T Subsea Operations-2021ahmezoОценок пока нет
- Vaida AkinfeДокумент7 страницVaida AkinfeΈνκινουαν Κόγκ ΑδάμουОценок пока нет
- 5390-POS10-K004-0001 Pile Lifting and Upending Analysis - Rev0Документ51 страница5390-POS10-K004-0001 Pile Lifting and Upending Analysis - Rev0PacPac TVОценок пока нет
- Design For Skid ProcedureДокумент15 страницDesign For Skid Proceduredesignhub152100% (1)
- Floating Hoses and EquipmentДокумент3 страницыFloating Hoses and EquipmentAyman64Оценок пока нет
- Mellitah Oil & Gas B.V. Joint Projects TeamДокумент3 страницыMellitah Oil & Gas B.V. Joint Projects TeamvrajakisoriDasi100% (1)
- Fpi Rules July20 PDFДокумент661 страницаFpi Rules July20 PDFMartin AdamsОценок пока нет
- Offshore StructuresДокумент50 страницOffshore StructuresSreeraja SreevilasanОценок пока нет
- General Engineering Knowledge PDFДокумент200 страницGeneral Engineering Knowledge PDFSeta BayuОценок пока нет
- Offshore Engineering - An OverviewДокумент39 страницOffshore Engineering - An Overviewkharade_a100% (1)
- Advanced Offshore EngineeringДокумент8 страницAdvanced Offshore EngineeringVikas KatiyarОценок пока нет
- Hose Loading StationsДокумент16 страницHose Loading StationsJim StrakerОценок пока нет
- OMAE2010-2: Feasibility and Design of The Clubstead: A Cable-Stayed Floating Structure For Offshore DwellingsДокумент11 страницOMAE2010-2: Feasibility and Design of The Clubstead: A Cable-Stayed Floating Structure For Offshore DwellingsSakshi IngaleОценок пока нет
- Construction Port Requirements For FOWTДокумент9 страницConstruction Port Requirements For FOWTEnriqueОценок пока нет
- Assignment OSS 1Документ19 страницAssignment OSS 1Syahmi AminnurОценок пока нет
- Dynamic Response of Fixed Offshore Structures Under Environmental LoadsДокумент16 страницDynamic Response of Fixed Offshore Structures Under Environmental LoadsxautraixxxxxxОценок пока нет
- Greatship Vimla TYPICAL ANCHOR HANDLINGДокумент10 страницGreatship Vimla TYPICAL ANCHOR HANDLINGjeedanОценок пока нет
- DEP Shell Table of ContentsДокумент14 страницDEP Shell Table of ContentsMomchil Pekov100% (2)
- History OF OIL RIGДокумент12 страницHistory OF OIL RIGRubyYangHashimОценок пока нет
- 2001 Kettles - Cantarells Akal C Complex OTC 13177Документ9 страниц2001 Kettles - Cantarells Akal C Complex OTC 13177Rosario P SerranoОценок пока нет
- Ejb-2023!22!002-Ra Ravi Kiran Design BasisДокумент47 страницEjb-2023!22!002-Ra Ravi Kiran Design BasisDesh DeepakОценок пока нет
- History of Onshore Oil Drilling PDFДокумент3 страницыHistory of Onshore Oil Drilling PDFHELPPPPPОценок пока нет
- 2018 Ghana Port Tariffs 16 03 2018Документ81 страница2018 Ghana Port Tariffs 16 03 2018Felix Kuami QuarshieОценок пока нет
- Anchor Handling Operations GuideДокумент10 страницAnchor Handling Operations GuideJose Manuel Baldor GutierrezОценок пока нет
- TechCon Offshore and Subsea LiftingДокумент16 страницTechCon Offshore and Subsea LiftingLeonardo RoncettiОценок пока нет