Вам также может понравиться
- Where AI Meets the Real WorldДокумент36 страницWhere AI Meets the Real WorldMadhaw ShuklaОценок пока нет
- Robotics: Where AI Meets Real WorldДокумент36 страницRobotics: Where AI Meets Real WorldPratik BariyaОценок пока нет
- Robotics: Where AI Meets Real WorldДокумент36 страницRobotics: Where AI Meets Real WorldSantosh SamОценок пока нет
- The Role of Electronics in Robotics: S.Chitra & S.NishaДокумент43 страницыThe Role of Electronics in Robotics: S.Chitra & S.Nishaharishan_sciОценок пока нет
- Lecture1 PDFДокумент37 страницLecture1 PDFmajesticdharma1985Оценок пока нет
- 1.introduction To RoboticsДокумент23 страницы1.introduction To RoboticsKumar Prabhakar100% (1)
- 1 A Inishantonrobotics-130912002640-Phpapp02Документ31 страница1 A Inishantonrobotics-130912002640-Phpapp02SELVAKUMAR RОценок пока нет
- Humanoid Robots: Vishwakarma Institute of Technology, Pune-37 Department of Electronics and Telecommunication EngineeringДокумент31 страницаHumanoid Robots: Vishwakarma Institute of Technology, Pune-37 Department of Electronics and Telecommunication EngineeringSoham Sajekar100% (1)
- Cornell Notes On RobotsДокумент8 страницCornell Notes On RobotsSharonОценок пока нет
- Robots Taking Our Jobs: An AnalysisДокумент23 страницыRobots Taking Our Jobs: An AnalysisGb NYlztEnОценок пока нет
- The Humanoid Robot ARMAR: Design and Control: June 2004Документ7 страницThe Humanoid Robot ARMAR: Design and Control: June 2004Sulagna RoyОценок пока нет
- Robotics: Lecture 1: Introduction To RoboticsДокумент44 страницыRobotics: Lecture 1: Introduction To RoboticsRegino BetongОценок пока нет
- Robotics: Lecture 1: Introduction To RoboticsДокумент43 страницыRobotics: Lecture 1: Introduction To Roboticsnguyễn công nghĩaОценок пока нет
- ROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirДокумент7 страницROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirrahulcoolhutОценок пока нет
- Industrial RobotsДокумент15 страницIndustrial RobotsLW LuWee ChongОценок пока нет
- 2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionДокумент62 страницы2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionSPARSH RAJОценок пока нет
- RoboticsДокумент42 страницыRoboticsMarini Pramod KumarОценок пока нет
- Automation & Artificial Intelligence: Robots and Their ApplicationsДокумент93 страницыAutomation & Artificial Intelligence: Robots and Their ApplicationsManal AndhereОценок пока нет
- A Biped Walking Machine: Table of ContentsДокумент21 страницаA Biped Walking Machine: Table of ContentsWenderson PaulaОценок пока нет
- History and Evolution of RobotsДокумент25 страницHistory and Evolution of RobotsSneha SandyОценок пока нет
- Robots in WarfareДокумент20 страницRobots in WarfarejayanthОценок пока нет
- AbstractДокумент2 страницыAbstractAmmaОценок пока нет
- Humanoid Robot:: Sensors ActuatorsДокумент2 страницыHumanoid Robot:: Sensors ActuatorsAmmaОценок пока нет
- Lecture 1Документ74 страницыLecture 1Muhammad Usama Bin TahirОценок пока нет
- Rohini 63738728871Документ10 страницRohini 63738728871Leonard MwijageОценок пока нет
- ManuscriptДокумент22 страницыManuscriptTesterОценок пока нет
- Introduction To RoboticsДокумент60 страницIntroduction To RoboticsJOEL STEPHEN 19BEE0262Оценок пока нет
- 2.introduction To RoboticsДокумент65 страниц2.introduction To RoboticsSachidhanandam MОценок пока нет
- Study On Humanoid Robot With SpecificationsДокумент5 страницStudy On Humanoid Robot With SpecificationsMaisha MashiataОценок пока нет
- Robotics EC368 Module 1-Ktustudents - inДокумент52 страницыRobotics EC368 Module 1-Ktustudents - inMUHAMMED RISWANОценок пока нет
- Class 1 - General IntroductionДокумент43 страницыClass 1 - General IntroductionDeepakОценок пока нет
- RBOTICДокумент16 страницRBOTICHus Forth Correnty100% (1)
- Everything You Need to Know About Humanoid RobotsДокумент13 страницEverything You Need to Know About Humanoid RobotsAnika KocherОценок пока нет
- To Invent You Need A Good Imagination and A Pile of JunkДокумент16 страницTo Invent You Need A Good Imagination and A Pile of Junkpchhina100% (16)
- Introduction To RoboticsДокумент63 страницыIntroduction To RoboticsHunterWigintonОценок пока нет
- Intro To RoboticsДокумент36 страницIntro To RoboticsDaniel Gómez LendínezОценок пока нет
- Advances in Robotics Lecture 4Документ22 страницыAdvances in Robotics Lecture 4AkashОценок пока нет
- RoboticsДокумент53 страницыRoboticsWaseem QassabОценок пока нет
- Snake Robotics: by Rohit Raichura SowmyaДокумент22 страницыSnake Robotics: by Rohit Raichura SowmyaRohit RaichuraОценок пока нет
- Intro 2 RoboticsДокумент49 страницIntro 2 Roboticsjudith bordanОценок пока нет
- Robotics 10 DLLДокумент7 страницRobotics 10 DLLshover solisОценок пока нет
- Introduction To RoboticsДокумент17 страницIntroduction To RoboticsBharath ThatipamulaОценок пока нет
- Intro to Robotics: Def, Types, Uses, History + Key ComponentsДокумент48 страницIntro to Robotics: Def, Types, Uses, History + Key ComponentsjaiganeshОценок пока нет
- Robotics: Submitted byДокумент9 страницRobotics: Submitted bytkultheОценок пока нет
- 1 - Introduction To RoboticsДокумент64 страницы1 - Introduction To RoboticsDibyanshuPandey100% (1)
- MJFA Tech Skills 3rd Quarter ReviewerДокумент7 страницMJFA Tech Skills 3rd Quarter Reviewerwho am iОценок пока нет
- 4164 5995 1 PBДокумент7 страниц4164 5995 1 PBmohamed rizwanОценок пока нет
- RoboticsДокумент176 страницRoboticsImoleoluwa OlayemiОценок пока нет
- Soft Copy On RoboticsДокумент18 страницSoft Copy On RoboticsRaghavendra RaghavОценок пока нет
- Mekatronika XiiiДокумент21 страницаMekatronika XiiiAgus IkiОценок пока нет
- Rra PDFДокумент157 страницRra PDFDawit shimelesОценок пока нет
- Unit1 - Fundamentals of Robotics - Industrial RoboticsДокумент60 страницUnit1 - Fundamentals of Robotics - Industrial RoboticsShankar PawarОценок пока нет
- M.J Deepak Reddy Satyabama University, Chennai: Aeronautical EngineeringДокумент29 страницM.J Deepak Reddy Satyabama University, Chennai: Aeronautical EngineeringMahendranath RamakrishnanОценок пока нет
- Robotics Intro (Sies Nerul)Документ49 страницRobotics Intro (Sies Nerul)sanjiv666100% (7)
- RoboticsДокумент39 страницRoboticsEysi WideОценок пока нет
- Lec 1 UpdatedДокумент60 страницLec 1 Updatedmuhammad usamaОценок пока нет
- RoboticsДокумент76 страницRoboticsvishesh Kumar singhОценок пока нет
- Robotics - PresentationДокумент57 страницRobotics - PresentationAnonymous YkDJkSqОценок пока нет
- 1 s2.0 S1474667016456557 MainДокумент6 страниц1 s2.0 S1474667016456557 MainHrithudev VsОценок пока нет
- PJT-PDP-TLM-733 Project Document & Drawing NumberingДокумент19 страницPJT-PDP-TLM-733 Project Document & Drawing NumberingseehariОценок пока нет
- Trading The MACDДокумент24 страницыTrading The MACDemirav283% (6)
- Andreas Dracoulis - Haynes and BooneДокумент15 страницAndreas Dracoulis - Haynes and BooneJoão Mendonça SantosОценок пока нет
- TOTAL FIBONACCI TRADING TRADE SETUPSДокумент12 страницTOTAL FIBONACCI TRADING TRADE SETUPSChandler BingОценок пока нет
- Volume Average ExponentialДокумент9 страницVolume Average ExponentialrentacuraОценок пока нет
- 48'' Pipeline Shore Approach Reportpdf PDFДокумент22 страницы48'' Pipeline Shore Approach Reportpdf PDFvpandya1981100% (2)
- Snagit 13 - CaptureДокумент71 страницаSnagit 13 - CaptureseehariОценок пока нет
- Numbering SystemДокумент8 страницNumbering SystemseehariОценок пока нет
- Pre-Comm Sow Sogtrev0Документ10 страницPre-Comm Sow Sogtrev0seehariОценок пока нет
- KPMG Law - Legal Guideline For Offshore Project Contracts PDFДокумент24 страницыKPMG Law - Legal Guideline For Offshore Project Contracts PDFseehari100% (1)
- Proposed Project Execution Baseline Schedule Rev BДокумент1 страницаProposed Project Execution Baseline Schedule Rev BseehariОценок пока нет
- Diagramma Della Verita by GalilieoДокумент11 страницDiagramma Della Verita by Galilieopremnaryans50% (2)
- Charter Party PDFДокумент149 страницCharter Party PDFseehariОценок пока нет
- Operations Department Procedure Manual: by byДокумент29 страницOperations Department Procedure Manual: by byseehariОценок пока нет
- Google book search project to digitize public domain textsДокумент232 страницыGoogle book search project to digitize public domain textsseehariОценок пока нет
- 20jan15raymondflood FourierДокумент40 страниц20jan15raymondflood FourierseehariОценок пока нет
- Pasavento Instructions For Zup Pattern IndicatorДокумент13 страницPasavento Instructions For Zup Pattern IndicatormleefxОценок пока нет
- Harmonic Analysis: Chapter TenДокумент40 страницHarmonic Analysis: Chapter TenKishore Chandrasekhar PatnaikОценок пока нет
- 2nd Internal Question Papers For Electrical and ElectronicsДокумент1 страница2nd Internal Question Papers For Electrical and ElectronicsseehariОценок пока нет
- Creating A Frame Title BlockДокумент2 страницыCreating A Frame Title BlockseehariОценок пока нет
- Intro To Ortho ProjectionДокумент22 страницыIntro To Ortho ProjectionseehariОценок пока нет
- Trading The MACDДокумент24 страницыTrading The MACDemirav283% (6)
- TEPZZ 7Z - A T: European Patent ApplicationДокумент39 страницTEPZZ 7Z - A T: European Patent ApplicationseehariОценок пока нет
- Alt Fuel PropertiesДокумент3 страницыAlt Fuel PropertiesseehariОценок пока нет
- .B.E.-B.Tech - VTUДокумент8 страниц.B.E.-B.Tech - VTUyamaha640Оценок пока нет
- M.tech - Credit SystemДокумент16 страницM.tech - Credit SystemRamesh BammankattiОценок пока нет
- Motion Um002 en PДокумент280 страницMotion Um002 en PseehariОценок пока нет
- MCS R6S Belt Z DrawingДокумент4 страницыMCS R6S Belt Z DrawingseehariОценок пока нет
- MCS R6Y DrawingДокумент4 страницыMCS R6Y DrawingseehariОценок пока нет
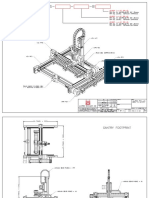
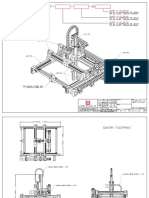
- HBG 25 Gantry Robot PrintДокумент1 страницаHBG 25 Gantry Robot PrintseehariОценок пока нет
- UK AVC Fan Catalogue CAT-23 DS PDFДокумент77 страницUK AVC Fan Catalogue CAT-23 DS PDFLuciano Castilho100% (1)
- NUM Flexium PLUS Catalog en High ResДокумент296 страницNUM Flexium PLUS Catalog en High ResPalaniappan SolaiyanОценок пока нет
- Honeywell MagneticSensorsДокумент13 страницHoneywell MagneticSensorsRakesh S IndiaОценок пока нет
- FBL 2360Документ14 страницFBL 2360musarraf172Оценок пока нет
- BLDC Motor Drive: Osman Martinez and Daniel SchwartzДокумент1 страницаBLDC Motor Drive: Osman Martinez and Daniel Schwartzprio aji widiantoroОценок пока нет
- Cogging TorqueДокумент12 страницCogging Torqueanil_nitkianОценок пока нет
- Design Thinking, Group 01Документ21 страницаDesign Thinking, Group 01Sangeeta PandaОценок пока нет
- Design and Analysis of A Brushless Doubly Fed Induction Machine With Rotary TransformerДокумент6 страницDesign and Analysis of A Brushless Doubly Fed Induction Machine With Rotary TransformerHuong ThaoОценок пока нет
- Maxon EC20 Flat 5wattДокумент1 страницаMaxon EC20 Flat 5wattElectromateОценок пока нет
- A9. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines Opportunities and ChallengesДокумент15 страницA9. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines Opportunities and Challengeswalidghoneim1970Оценок пока нет
- Analysis, Design and Control of Permanent Magnet Synchronous Motors For Wide-Speed OperationДокумент230 страницAnalysis, Design and Control of Permanent Magnet Synchronous Motors For Wide-Speed OperationkarthikОценок пока нет
- Finite-Element Models For Electrical Machines by HennebergerДокумент12 страницFinite-Element Models For Electrical Machines by HennebergermuhassadiОценок пока нет
- M.Tech Power Electronics & Drives CurriculumДокумент31 страницаM.Tech Power Electronics & Drives CurriculumpchakkrapaniОценок пока нет
- Fixed Cassette Cat 2020Документ2 страницыFixed Cassette Cat 2020mohamad chaudhariОценок пока нет
- Laboratory Shaker MachineДокумент10 страницLaboratory Shaker MachineJibril omarОценок пока нет
- Advanced Power Electronics - I - Department Elective-IДокумент2 страницыAdvanced Power Electronics - I - Department Elective-IThomas RussellОценок пока нет
- High-speed bench-top centrifuge for microhematocrit determinationsДокумент13 страницHigh-speed bench-top centrifuge for microhematocrit determinationsJose Luis Gomez MojicaОценок пока нет
- mBUS Servo Board LS-163m1g3: Doc # 71216301 / Rev A, 06/10/2021Документ12 страницmBUS Servo Board LS-163m1g3: Doc # 71216301 / Rev A, 06/10/2021Ilhami DemirОценок пока нет
- AC Motor CatalogueДокумент24 страницыAC Motor CatalogueArun KiranОценок пока нет
- Motor Technologies: Direct Drive MotorsДокумент2 страницыMotor Technologies: Direct Drive Motorskats2404Оценок пока нет
- Optidrive P2 BrochureДокумент12 страницOptidrive P2 BrochureCaptain25Оценок пока нет
- Eco Car Black BookДокумент26 страницEco Car Black BookharshalОценок пока нет
- Automatic Side Stand For Two WheelerДокумент84 страницыAutomatic Side Stand For Two Wheelercoolhari0825% (4)
- Rotor Design of High-Speed Permanent Magnet Synchronous Motors Considering Rotor Magnet and Sleeve MaterialsДокумент4 страницыRotor Design of High-Speed Permanent Magnet Synchronous Motors Considering Rotor Magnet and Sleeve MaterialsnaveenОценок пока нет
- All-Test Pro At5 Brochure r092414Документ6 страницAll-Test Pro At5 Brochure r092414cbernabeОценок пока нет
- Proposal 6HДокумент21 страницаProposal 6Hrsp5105Оценок пока нет
- Design and Fabrication of Student Solar CarДокумент6 страницDesign and Fabrication of Student Solar CarAnonymous izrFWiQОценок пока нет
- Brushless Direct Current Motor Design and AnalysisДокумент13 страницBrushless Direct Current Motor Design and AnalysisKurt ZhiОценок пока нет
- Design of Brushless PM Machines Mar2011Документ1 страницаDesign of Brushless PM Machines Mar2011Special2424Оценок пока нет
- LCI System BasicsДокумент4 страницыLCI System Basicsnaveen jainОценок пока нет