Вам также может понравиться
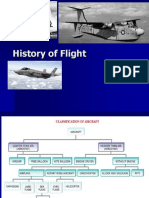
- History of FlightДокумент24 страницыHistory of Flightmanisek100% (1)
- Smoke Generator IntroductionДокумент1 страницаSmoke Generator IntroductionmanisekОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Power Plant Lecture Notes - CHAPTER-3 STEAM GENERATOR: October 2014Документ46 страницPower Plant Lecture Notes - CHAPTER-3 STEAM GENERATOR: October 2014manisekОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Parts of An Airplane 9-12Документ26 страницParts of An Airplane 9-12Pedro PereiraОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Unit V - Metrology and Instrumentation NotesДокумент34 страницыUnit V - Metrology and Instrumentation NotesmanisekОценок пока нет
- FEM 16 MARKS QUESTIONSДокумент13 страницFEM 16 MARKS QUESTIONSmanisekОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Theory of Flight: 6.01 Aircraft Design and ConstructionДокумент45 страницTheory of Flight: 6.01 Aircraft Design and ConstructionmanisekОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- TurbinesДокумент38 страницTurbinesmanisekОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Mani EssayДокумент1 страницаMani EssaymanisekОценок пока нет
- ADPДокумент8 страницADPmanisekОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- ME2252 Question BankДокумент4 страницыME2252 Question BankmanisekОценок пока нет
- Sessions Case No. 641 of 2011Документ24 страницыSessions Case No. 641 of 2011SureshОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Bonus Orion PovДокумент7 страницBonus Orion PovIngridMontesSОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Diagnostic Applications of The Hand Test: Edwin E. WagnerДокумент2 страницыDiagnostic Applications of The Hand Test: Edwin E. WagnerMike PagaduanОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Lakota WomanДокумент3 страницыLakota WomanChara100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Ritu BeriДокумент9 страницRitu BeriDave RoyОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Waves and Sound WorksheetДокумент11 страницWaves and Sound WorksheetLailaОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- MGT 3150 SyllabusДокумент7 страницMGT 3150 SyllabusCarl NguyenОценок пока нет
- (g11) Practice Test 06 - MegaДокумент4 страницы(g11) Practice Test 06 - MegaPhương LiênОценок пока нет
- Tehilim 2017 Salmo 5Документ15 страницTehilim 2017 Salmo 5ingluirОценок пока нет
- Sampling and PopulationДокумент53 страницыSampling and PopulationNoorhanani Muhd100% (2)
- Mushroom Wisdom - How Shamans Cultivate Spiritual Consciousness - Martin W. BallДокумент206 страницMushroom Wisdom - How Shamans Cultivate Spiritual Consciousness - Martin W. BallTim Wyatt100% (1)
- Degrees of Comparison: Positive, Comparative & SuperlativeДокумент9 страницDegrees of Comparison: Positive, Comparative & SuperlativeImmanuel PaternuОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Principles and Strategies of Teaching Prof - EdДокумент12 страницPrinciples and Strategies of Teaching Prof - EdBapa LoloОценок пока нет
- Whall Theory CritiqueДокумент10 страницWhall Theory Critiqueapi-273066575Оценок пока нет
- Research Study About Role of BenefactorsДокумент13 страницResearch Study About Role of BenefactorsAlfonso Jabines100% (1)
- 5076 5077 5078 - 2014Документ49 страниц5076 5077 5078 - 2014Lin Emancipation0% (1)
- Lums Megzine PDFДокумент286 страницLums Megzine PDFShahzad Nasir SayyedОценок пока нет
- Timely Topics Number 01Документ2 страницыTimely Topics Number 01Find the LightОценок пока нет
- Lesson No 01 Tute No IIIДокумент56 страницLesson No 01 Tute No IIIdeepthiОценок пока нет
- CLMD4A EngG7-3Документ40 страницCLMD4A EngG7-3Aubrey AbuanОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- An Assessment of The Impact of Violence On Tourism and Hospitality Sector in Plateau State: A Study of National Museum, Jos and The Jos Wild Life ParkДокумент228 страницAn Assessment of The Impact of Violence On Tourism and Hospitality Sector in Plateau State: A Study of National Museum, Jos and The Jos Wild Life ParkAbishai Auta Gaiya100% (4)
- Lesson 6: Moral Standards vs. Non-Moral StandardsДокумент1 страницаLesson 6: Moral Standards vs. Non-Moral StandardsJilcresDatoyОценок пока нет
- Hailu Worku - LuluДокумент112 страницHailu Worku - Luluhailu123Оценок пока нет
- Multiculturalism and Its Issues: "Life Is Plurality, Death Is Uniformity."Документ7 страницMulticulturalism and Its Issues: "Life Is Plurality, Death Is Uniformity."Mihaela OlaruОценок пока нет
- Tutorial-CH6-Statics (Class-Watermark) PDFДокумент5 страницTutorial-CH6-Statics (Class-Watermark) PDFJeanette LynnОценок пока нет
- 5 Couples Solved Practical ProblemsДокумент34 страницы5 Couples Solved Practical ProblemsCLAP or SLAP IIОценок пока нет
- Hci Lect 1Документ36 страницHci Lect 1rizwanОценок пока нет
- PWT Chords (English-Tagalog) EDIT Dec-16 PDFДокумент79 страницPWT Chords (English-Tagalog) EDIT Dec-16 PDFChristine Joy Manguerra RabiОценок пока нет
- What About My Past Mistakes?Документ1 страницаWhat About My Past Mistakes?Musa AlieОценок пока нет
- World Leadership Conference 2009 Post Event ReportДокумент15 страницWorld Leadership Conference 2009 Post Event ReportECO SingaporeОценок пока нет