Вам также может понравиться
- InTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesДокумент20 страницInTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesM VetriselviОценок пока нет
- Batteries Charging Systems For Electric and Plug-In Hybrid Electric VehiclesДокумент19 страницBatteries Charging Systems For Electric and Plug-In Hybrid Electric VehiclesAmit RamvatОценок пока нет
- Internet of Things Enabled Electric Vehicles in Smart CitiesДокумент8 страницInternet of Things Enabled Electric Vehicles in Smart Citiespushpa lathaОценок пока нет
- Experimental Validation of A Three-Port Integrated Topology To Interface Electric Vehicles and Renewables With The Electrical GridДокумент11 страницExperimental Validation of A Three-Port Integrated Topology To Interface Electric Vehicles and Renewables With The Electrical GridDEVULAL BОценок пока нет
- Vehicle-To-Grid Systems For Sustainable DevelopmenДокумент19 страницVehicle-To-Grid Systems For Sustainable DevelopmenkarthicktamilmaniОценок пока нет
- Vehicle To Grid TechnologyДокумент7 страницVehicle To Grid TechnologyVIVA-TECH IJRIОценок пока нет
- Smart Charging of Electric Vehicles With Photovoltaic Power and Vehicle-To-Grid Technology in A Microgrid A Case StudyДокумент11 страницSmart Charging of Electric Vehicles With Photovoltaic Power and Vehicle-To-Grid Technology in A Microgrid A Case StudyEngEzequielОценок пока нет
- Full Report On "VEHICLE TO GRID TECHNOLOGY (V2G) "Документ35 страницFull Report On "VEHICLE TO GRID TECHNOLOGY (V2G) "Rahul Garg67% (3)
- A Review of Plug-In Electric Vehicles As Distributed Energy Storages in Smart GridДокумент6 страницA Review of Plug-In Electric Vehicles As Distributed Energy Storages in Smart GridZunAib AliОценок пока нет
- Electric Vehicle Thesis PDFДокумент4 страницыElectric Vehicle Thesis PDFWriteMyPaperForMeUK100% (4)
- Generation Expansion Planning Considering Renewable EnergiesДокумент11 страницGeneration Expansion Planning Considering Renewable EnergiesAJER JOURNALОценок пока нет
- PSP Lab ManualДокумент43 страницыPSP Lab ManualrahulОценок пока нет
- Distribution Grid Impacts of Smart Electric Vehicle Charging From Different PerspectivesДокумент10 страницDistribution Grid Impacts of Smart Electric Vehicle Charging From Different PerspectivesSumit RathorОценок пока нет
- Grid-Connected EV Charging With Renewable Energy Integration in Parking LotsДокумент64 страницыGrid-Connected EV Charging With Renewable Energy Integration in Parking LotsGHANSHYAM MEENAОценок пока нет
- 10 35378-Gujs 554206-1121835Документ19 страниц10 35378-Gujs 554206-1121835Nahil ShakerОценок пока нет
- Electrical Power and Energy Systems: Rong-Ceng LeouДокумент6 страницElectrical Power and Energy Systems: Rong-Ceng LeouMuhammad HamzaОценок пока нет
- Energy Conversion and Management: Masoud Honarmand, Alireza Zakariazadeh, Shahram JadidДокумент11 страницEnergy Conversion and Management: Masoud Honarmand, Alireza Zakariazadeh, Shahram JadidKiranОценок пока нет
- Smart Deregulated Grid Frequency Control in Presence of Renewable Energy Resources by Evs Charging ControlДокумент13 страницSmart Deregulated Grid Frequency Control in Presence of Renewable Energy Resources by Evs Charging Controlpavan gangwarОценок пока нет
- Integrated Energy Scheduling and Routing For A Network of Mobile ProsumersДокумент12 страницIntegrated Energy Scheduling and Routing For A Network of Mobile ProsumersAtiquzzaman ShomaОценок пока нет
- The Concept of Ev S Intelligent Integrated Station and Its Energy FlowДокумент29 страницThe Concept of Ev S Intelligent Integrated Station and Its Energy FlowHorváth PéterОценок пока нет
- Multi-Agent System For Managing A Power Distribution System With Plug-In Hybrid Electrical Vehicles in Smart GridДокумент6 страницMulti-Agent System For Managing A Power Distribution System With Plug-In Hybrid Electrical Vehicles in Smart GridsverdlowОценок пока нет
- Topics-Optimal PEV ChargingДокумент2 страницыTopics-Optimal PEV ChargingilbahiОценок пока нет
- Fuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintДокумент16 страницFuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintkesavantОценок пока нет
- Introduction To V2G TechnologyДокумент15 страницIntroduction To V2G TechnologyMaranОценок пока нет
- Chin ProjectДокумент64 страницыChin ProjectJagannath SrivatsaОценок пока нет
- Energies: Electric Vehicle Charging Strategy For Isolated Systems With High Penetration of Renewable GenerationДокумент21 страницаEnergies: Electric Vehicle Charging Strategy For Isolated Systems With High Penetration of Renewable GenerationAlberto RiosОценок пока нет
- PHD Research Proposal (Electrical Power & Energy Engineering) PDFДокумент13 страницPHD Research Proposal (Electrical Power & Energy Engineering) PDFSaraMuzaffar33% (3)
- Un Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosДокумент10 страницUn Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosJULIETTE XIMENA SANCHEZ HUERTASОценок пока нет
- Photovoltaics (PV) and Electric Vehicle-To-grid (V2G) Strategies For Peak Demand Reduction in Urban Regions in Brazil in A Smart Grid EnvironmentДокумент9 страницPhotovoltaics (PV) and Electric Vehicle-To-grid (V2G) Strategies For Peak Demand Reduction in Urban Regions in Brazil in A Smart Grid EnvironmentEngEzequielОценок пока нет
- Energies: Vehicle Electrification: New Challenges and Opportunities For Smart GridsДокумент20 страницEnergies: Vehicle Electrification: New Challenges and Opportunities For Smart GridsMahabub HaiderОценок пока нет
- Charge Coordination and Battery Lifecycle Analysis of Electric Vehicles With V2G ImplementationДокумент11 страницCharge Coordination and Battery Lifecycle Analysis of Electric Vehicles With V2G ImplementationneeliaОценок пока нет
- An Optimal Charging/discharging Strategy For Smart Electrical Car ParksДокумент9 страницAn Optimal Charging/discharging Strategy For Smart Electrical Car ParksAustin Okoth OmondiОценок пока нет
- Renewable Energy: M.F. Shaaban, A.A. Eajal, E.F. El-SaadanyДокумент8 страницRenewable Energy: M.F. Shaaban, A.A. Eajal, E.F. El-SaadanySumit RathorОценок пока нет
- Wevj 09 00035Документ7 страницWevj 09 00035sayantikaОценок пока нет
- Thesis On Hybrid Energy SystemДокумент5 страницThesis On Hybrid Energy Systemafknojbcf100% (2)
- Energy Storage Devices For Future Hybrid Electric VehiclesДокумент10 страницEnergy Storage Devices For Future Hybrid Electric VehiclesNavaneeth KedlayaОценок пока нет
- Impact of EVДокумент6 страницImpact of EVBùi ViệtОценок пока нет
- Dynamic Charging of Electric Vehicles IntegratingДокумент10 страницDynamic Charging of Electric Vehicles IntegratingHanumant ChikuОценок пока нет
- Comparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityДокумент10 страницComparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityAdriana Q.Оценок пока нет
- Comprehensive Review of Fast ChargingДокумент16 страницComprehensive Review of Fast Chargingruhul aminОценок пока нет
- Hybrid Power Systems ThesisДокумент8 страницHybrid Power Systems ThesisCarmen Pell100% (1)
- 1 s2.0 S0959652622002281 MainДокумент22 страницы1 s2.0 S0959652622002281 MainsayantikaОценок пока нет
- Alireza 2014Документ9 страницAlireza 2014AmirKhanОценок пока нет
- Energies: Reinforcement Learning Based Energy Management Algorithm For Smart Energy BuildingsДокумент19 страницEnergies: Reinforcement Learning Based Energy Management Algorithm For Smart Energy BuildingsparisaОценок пока нет
- Techno-Economic Analysis of Isolated and Grid Connected Hybrid SystemsДокумент50 страницTechno-Economic Analysis of Isolated and Grid Connected Hybrid SystemsMukОценок пока нет
- International Journal of Multidisciplinary Research and Growth EvaluationДокумент8 страницInternational Journal of Multidisciplinary Research and Growth EvaluationJames UjamОценок пока нет
- 2nd Control of Single-PhaseДокумент37 страниц2nd Control of Single-PhaseCaptain GamerОценок пока нет
- Charging of Electric VehicleДокумент13 страницCharging of Electric VehicleNahyanОценок пока нет
- Ant Colony Optimzation of Microgrid Power ManagementДокумент7 страницAnt Colony Optimzation of Microgrid Power ManagementKunalAroraОценок пока нет
- Electrical Power and Energy Systems: Chia-Liang Lu, Chun-Lung Chen, Daw-Shang Hwang, Yuang-Tung ChengДокумент9 страницElectrical Power and Energy Systems: Chia-Liang Lu, Chun-Lung Chen, Daw-Shang Hwang, Yuang-Tung Chengteju2812Оценок пока нет
- Vehicle-To-Grid Power Fundamentals Calculating P PDFДокумент12 страницVehicle-To-Grid Power Fundamentals Calculating P PDFgaganmeena1994Оценок пока нет
- An Intelligent Load Management System With Renewable Energy Integration For Smart HomesДокумент14 страницAn Intelligent Load Management System With Renewable Energy Integration For Smart HomesektОценок пока нет
- TP (Muhammad Nurazli Bin Mohd Dali 2016690508)Документ8 страницTP (Muhammad Nurazli Bin Mohd Dali 2016690508)azliОценок пока нет
- Decision Making of A Virtual Power Plant Under Uncertainties For Bidding in A Day-Ahead Market Using Point Estimate Method (Highlighted)Документ11 страницDecision Making of A Virtual Power Plant Under Uncertainties For Bidding in A Day-Ahead Market Using Point Estimate Method (Highlighted)KJОценок пока нет
- Peak Shaving Through Battery Storage For Low-VoltaДокумент17 страницPeak Shaving Through Battery Storage For Low-VoltartorrescoralОценок пока нет
- Europe: Impact of Dispersed and Renewable Generation On Power System StructureДокумент38 страницEurope: Impact of Dispersed and Renewable Generation On Power System StructuredanielraqueОценок пока нет
- Energies 15 06037 v3Документ30 страницEnergies 15 06037 v3BENI PURNOMOОценок пока нет
- Innovation Landscape brief: Electric-vehicle smart chargingОт EverandInnovation Landscape brief: Electric-vehicle smart chargingОценок пока нет
- Microsoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideОт EverandMicrosoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideОценок пока нет
- DTC P1345 Crankshaft Position (CKP) - Camshaft Position (CMP) CorrelationДокумент5 страницDTC P1345 Crankshaft Position (CKP) - Camshaft Position (CMP) CorrelationChino PlagaОценок пока нет
- Camry 2.2L (5S-FE) TCC 1992-96 PDF Jag.Документ48 страницCamry 2.2L (5S-FE) TCC 1992-96 PDF Jag.Chino PlagaОценок пока нет
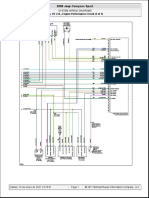
- Jeep Compass 2.4Документ1 страницаJeep Compass 2.4Chino PlagaОценок пока нет
- Jeep Compass 2.4Документ1 страницаJeep Compass 2.4Chino Plaga100% (2)
- Jeep Compass 2.4Документ1 страницаJeep Compass 2.4Chino Plaga100% (1)
- 2014 Nissan-Datsun Versa Sedan Engine Controls (Powertrain Management) - ALLDATA RepairДокумент5 страниц2014 Nissan-Datsun Versa Sedan Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaОценок пока нет
- Engine Control (2UZ-FE) - 01-01Документ1 страницаEngine Control (2UZ-FE) - 01-01Chino PlagaОценок пока нет
- Seat Leon (Data Lines) 2005-2011Документ4 страницыSeat Leon (Data Lines) 2005-2011Chino PlagaОценок пока нет
- 2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairДокумент6 страниц2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaОценок пока нет
- Manual de Servicio Isuzu 2.2lДокумент24 страницыManual de Servicio Isuzu 2.2lChino PlagaОценок пока нет
- Renewable and Sustainable Energy Reviews: Francis Mwasilu, Jackson John Justo, Eun-Kyung Kim, Ton Duc Do, Jin-Woo JungДокумент16 страницRenewable and Sustainable Energy Reviews: Francis Mwasilu, Jackson John Justo, Eun-Kyung Kim, Ton Duc Do, Jin-Woo JungChino PlagaОценок пока нет
- Evb PDFДокумент259 страницEvb PDFChino PlagaОценок пока нет
- Cleaner Cars From Cradle To Grave Full ReportДокумент54 страницыCleaner Cars From Cradle To Grave Full ReportChino PlagaОценок пока нет
- Photon Beam Characteristics & Basic Concepts of Treatment Planning - Dr. K J Maria Das PDFДокумент63 страницыPhoton Beam Characteristics & Basic Concepts of Treatment Planning - Dr. K J Maria Das PDFChino PlagaОценок пока нет
- 2013 Nissan Leaf DGДокумент44 страницы2013 Nissan Leaf DGChino PlagaОценок пока нет
- 6.7L DieselДокумент94 страницы6.7L DieselBrendan Brodie100% (15)
- Case Study 8.6: Transformation in The Automobile IndustryДокумент4 страницыCase Study 8.6: Transformation in The Automobile IndustryUmar100% (1)
- Civil Engineering Educational TourДокумент9 страницCivil Engineering Educational TourJane BonggoОценок пока нет
- Aar75 16Документ112 страницAar75 16vostok3KAОценок пока нет
- Jet Airways PresentationДокумент47 страницJet Airways Presentationsapan198680% (5)
- Ford Cus 2007 PDFДокумент3 594 страницыFord Cus 2007 PDFNhật Đặng100% (1)
- Odyssey Papers 03 - The Jacksonville Blue China' Shipwreck & The Myth of Deep-Sea PreservationДокумент13 страницOdyssey Papers 03 - The Jacksonville Blue China' Shipwreck & The Myth of Deep-Sea PreservationVittorio SerafinОценок пока нет
- Hook BoltsДокумент1 страницаHook BoltsRITOОценок пока нет
- A11h0002 PDFДокумент215 страницA11h0002 PDFTun WaiОценок пока нет
- Moam - Info Freefall Lifeboat Type GFF 57m With Sliding Ramp H 919Документ1 страницаMoam - Info Freefall Lifeboat Type GFF 57m With Sliding Ramp H 919Anton LunevОценок пока нет
- Aily 35C11: Specification SheetДокумент4 страницыAily 35C11: Specification SheetMOKITOKIОценок пока нет
- Notification - Painting Competition - 125 YearsДокумент3 страницыNotification - Painting Competition - 125 Yearsvandana PanwarОценок пока нет
- FAA Aircraft Char DB AC 150 5300 13B App 2023 02 07Документ375 страницFAA Aircraft Char DB AC 150 5300 13B App 2023 02 07Kha Trấn ÁcОценок пока нет
- Brewster Sb2a BuccaneerДокумент9 страницBrewster Sb2a Buccaneerseafire470% (1)
- Infosheet MXPLC - TERRAVISIONДокумент1 страницаInfosheet MXPLC - TERRAVISIONAntonia AdsuarОценок пока нет
- Geo MEast 2017Документ65 страницGeo MEast 2017Monu Lal BurnwalОценок пока нет
- 09 Consulta 06 Septiembre 2022Документ63 страницы09 Consulta 06 Septiembre 2022David Alexander Moncada EstradaОценок пока нет
- BP Shipping Questionnaire: New Build VesselДокумент15 страницBP Shipping Questionnaire: New Build Vesselmr mrОценок пока нет
- Chapter 6 A Aircraft PerformanceДокумент20 страницChapter 6 A Aircraft Performancemoshiur rahmanОценок пока нет
- Concrete Polishing & Laser Screed FlooringДокумент7 страницConcrete Polishing & Laser Screed FlooringLamba Techno Flooring SolutionsОценок пока нет
- Sovereign Management Consultancy FZC UaeДокумент29 страницSovereign Management Consultancy FZC UaeAshique HamdaniОценок пока нет
- Installing An Outboard To The Boat TransomДокумент13 страницInstalling An Outboard To The Boat TransomДмитрий КирзуновОценок пока нет
- Bench Mark Nova CometДокумент41 страницаBench Mark Nova CometVeeresh T KumbarОценок пока нет
- Garuda Boarding PassДокумент1 страницаGaruda Boarding PassRaditya JuliantoroОценок пока нет
- MOZ - 6152 - Trailer UsageДокумент6 страницMOZ - 6152 - Trailer UsageSravanPolepalliОценок пока нет
- C10752595 PDFДокумент208 страницC10752595 PDFmohamedIGCMO100% (1)
- WCL2106D 0FДокумент430 страницWCL2106D 0FTri Haryono100% (3)
- McCarthy v. Northwest Airlines, 1st Cir. (1995)Документ40 страницMcCarthy v. Northwest Airlines, 1st Cir. (1995)Scribd Government DocsОценок пока нет
- AvimarcaДокумент4 страницыAvimarcaFernando CardenasОценок пока нет
- Operating Instructions Scraper Conveyor: Conveying SystemsДокумент20 страницOperating Instructions Scraper Conveyor: Conveying SystemsIbrahimFikryОценок пока нет