Вам также может понравиться
- Informe Robot BalancinДокумент21 страницаInforme Robot BalancinMarco Andres Cisneros VargasОценок пока нет
- MANUAL DE TORnoДокумент38 страницMANUAL DE TORnoraziel67% (3)
- Mini SumoДокумент12 страницMini Sumopedro alonzoОценок пока нет
- Informe Enero 22Документ19 страницInforme Enero 22Michael VargasОценок пока нет
- Documento AudrinoДокумент30 страницDocumento AudrinoEthel HaihtОценок пока нет
- UNIDAD 3 Practica 2 Proyecto Parte 2Документ4 страницыUNIDAD 3 Practica 2 Proyecto Parte 2Roberto ZuritaОценок пока нет
- Practicas ServomotorДокумент15 страницPracticas ServomotorEdgar Ubaldo Correa GrandeОценок пока нет
- Proyecto FinalДокумент14 страницProyecto FinalAlan David Rojo HernandezОценок пока нет
- Reporte de Seguidor de LineaДокумент10 страницReporte de Seguidor de LineaRaymond KenneyОценок пока нет
- Robot Evasor de Obtáculos: ProgramaДокумент3 страницыRobot Evasor de Obtáculos: ProgramaEl LoОценок пока нет
- Automatizacion Del Transporte de Carga - Luis Fernando Vargas CandiaДокумент21 страницаAutomatizacion Del Transporte de Carga - Luis Fernando Vargas Candialuisvargasc66Оценок пока нет
- Arduino L298Документ8 страницArduino L298Adriana Muñoz MuñozОценок пока нет
- Código CochecitoДокумент11 страницCódigo CochecitoAlex QuirogaОценок пока нет
- Generando Codigos en Pic PDFДокумент22 страницыGenerando Codigos en Pic PDFZxdIaminxXzlovewithzxXzyouzxОценок пока нет
- Proyecto No 4 Controlar 2 Servomotores de 0o A 180o Con 1 JoystickДокумент6 страницProyecto No 4 Controlar 2 Servomotores de 0o A 180o Con 1 JoystickDomingo ArroyoОценок пока нет
- In For Me Practica 2Документ10 страницIn For Me Practica 2Jose OrtizОценок пока нет
- Ejemplo Control y Motores Carro Con Arduino (Recuperado Automáticamente)Документ5 страницEjemplo Control y Motores Carro Con Arduino (Recuperado Automáticamente)Daniela MatizОценок пока нет
- Programas PosiblesДокумент5 страницProgramas PosiblesDario Pastor FuentesОценок пока нет
- PRACTICA 2 Servo-Encoder-Arduino Robotica 2024AДокумент7 страницPRACTICA 2 Servo-Encoder-Arduino Robotica 2024ARigoberto Sebastian CeballosОценок пока нет
- Motor Paso A Paso y ServoДокумент10 страницMotor Paso A Paso y ServoOMAR OLSIM MAMANI COSMEОценок пока нет
- Embebidos 2Документ10 страницEmbebidos 2Jorman Andrés Galvis díazОценок пока нет
- Arduino Robot TravisДокумент8 страницArduino Robot Travisa637888Оценок пока нет
- Informe Lab4Документ7 страницInforme Lab4lmezahОценок пока нет
- HL293DДокумент15 страницHL293DRosio Evaristo VivarОценок пока нет
- Quiz 5christian Ricardo Resendiz 159669Документ5 страницQuiz 5christian Ricardo Resendiz 159669Cristian LopezzОценок пока нет
- Laboratorio 2 Micro 2Документ9 страницLaboratorio 2 Micro 2Samuel FloresОценок пока нет
- Práctico 3 Del Curso Microprocesadores y MicrocontroladoresДокумент14 страницPráctico 3 Del Curso Microprocesadores y MicrocontroladoresIvan BolañoОценок пока нет
- Laboratorio PERIFERICOS DE PLACA CONTROLADORA MSP432P401RДокумент10 страницLaboratorio PERIFERICOS DE PLACA CONTROLADORA MSP432P401RVictor CondoriОценок пока нет
- Uso y Manejo de MotoresДокумент6 страницUso y Manejo de MotoresEdwin Javier Garavito HernándezОценок пока нет
- Implementacion de Pid Con Atmega8Документ7 страницImplementacion de Pid Con Atmega8Milo VanvanОценок пока нет
- Arduino Robot Car Wireless Control Utilizando HCДокумент37 страницArduino Robot Car Wireless Control Utilizando HCPier DanОценок пока нет
- Robot Velocista LycanДокумент13 страницRobot Velocista Lycanramiro barriosОценок пока нет
- Informe GinballДокумент10 страницInforme GinballElizabeth PorrasОценок пока нет
- Paso 6 DannyДокумент13 страницPaso 6 DannySantiago BarónОценок пока нет
- Trabajo Electricidad Joaquín CortizoДокумент5 страницTrabajo Electricidad Joaquín CortizocortizofragaОценок пока нет
- Proyecto Carrito Controlado Por BluetoothДокумент11 страницProyecto Carrito Controlado Por Bluetootharturo100% (5)
- Arduino Control Car V2 byДокумент7 страницArduino Control Car V2 byedithОценок пока нет
- NVERNADEROДокумент6 страницNVERNADEROJhonattan JavierОценок пока нет
- Burgasi Carvajal Espin Freire PaezДокумент17 страницBurgasi Carvajal Espin Freire PaezJonathan FalconОценок пока нет
- Informe - Carro Arduino - FinalДокумент22 страницыInforme - Carro Arduino - FinalDahyana Uribe Cortes50% (2)
- Programar Un Generador de Impulsos en El STEP 7 V11 - InfoPLCДокумент4 страницыProgramar Un Generador de Impulsos en El STEP 7 V11 - InfoPLCJav BarreraОценок пока нет
- Robot Minisumo TerminadoДокумент5 страницRobot Minisumo TerminadoLuis Fernando ZGОценок пока нет
- CodigoДокумент3 страницыCodigoDominic EdmundoОценок пока нет
- Control Del Brillo de Una Bombilla Mediante Un Dimmer AC y BluetoothДокумент6 страницControl Del Brillo de Una Bombilla Mediante Un Dimmer AC y BluetoothDarwin Cando Ligista de CorazonОценок пока нет
- Tarea Final Segundo Parcial-AriasДокумент13 страницTarea Final Segundo Parcial-AriasStalin AriasОценок пока нет
- Cámara PTZДокумент5 страницCámara PTZAntoni MonteroОценок пока нет
- MCP V3 B737 Manual 2013 REV1.0 CastellanoДокумент11 страницMCP V3 B737 Manual 2013 REV1.0 CastellanoJuanjo EPОценок пока нет
- Resume NДокумент39 страницResume NLauraОценок пока нет
- PDF Control de Velocidad de Un Motor DC Con Pic - CompressДокумент15 страницPDF Control de Velocidad de Un Motor DC Con Pic - CompressJonathan Jimenez JardonОценок пока нет
- Motor-PID Con PicsДокумент9 страницMotor-PID Con PicsFabian Hernandez AguilarОценок пока нет
- Arduino Rover Controlado Por Bluetooth en Android Con VirtuinoДокумент12 страницArduino Rover Controlado Por Bluetooth en Android Con VirtuinoPierDonneeОценок пока нет
- Paso 6 CesarДокумент13 страницPaso 6 CesarSantiago BarónОценок пока нет
- 11N LABEP2014-II Info PDFДокумент26 страниц11N LABEP2014-II Info PDFRubenPerezОценок пока нет
- CompilerДокумент6 страницCompilerAdrianMartinezMendezОценок пока нет
- Guía de Ejercicios de Programación ArduinoДокумент6 страницGuía de Ejercicios de Programación ArduinoErbin C EspinozaОценок пока нет
- Coche Controlado Por Bluetooth Con Arduino y DopДокумент10 страницCoche Controlado Por Bluetooth Con Arduino y DopGabriel ChilquilloОценок пока нет
- Montaje y Configuración de Dron Con Naze32Документ25 страницMontaje y Configuración de Dron Con Naze32Daniel Vicente Perpiñá CastilloОценок пока нет
- Programando PICs CCS 09Документ4 страницыProgramando PICs CCS 09Antony Charles TejadaОценок пока нет
- Practica Nro 7Документ5 страницPractica Nro 7Ronald ContrerasОценок пока нет
- Compilador C CCS y Simulador Proteus para Microcontroladores PICОт EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICРейтинг: 2.5 из 5 звезд2.5/5 (5)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109От EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Оценок пока нет
- Operaciones de Trabajo en El TallerДокумент2 страницыOperaciones de Trabajo en El TallerStalyn FloresОценок пока нет
- 5 Basico PDFДокумент2 страницы5 Basico PDFL LoОценок пока нет
- 0 - Precios Mano de Obra ElectricoДокумент1 страница0 - Precios Mano de Obra ElectricoFremao MemeОценок пока нет
- Cajones PDFДокумент8 страницCajones PDFoctaheupОценок пока нет
- Riesgo 7Документ68 страницRiesgo 7Antoni Rivera PortaОценок пока нет
- Modo de Servicio Todas Las MarcasДокумент17 страницModo de Servicio Todas Las MarcasfelipegatuzzoОценок пока нет
- Circuito de Estrobo de Leds Utilizando NE555 e 4017Документ14 страницCircuito de Estrobo de Leds Utilizando NE555 e 4017John RodriguezОценок пока нет
- Catalogo Eaton Moeller 2019Документ6 страницCatalogo Eaton Moeller 2019Abrahan HCОценок пока нет
- T5-Accesorios y Equipos de Terminacion de Pozos-EstudiantesДокумент37 страницT5-Accesorios y Equipos de Terminacion de Pozos-EstudiantesJonny Pedraza50% (2)
- 7mo Semana 6 Actividad Evaluativa 3P-2020Документ6 страниц7mo Semana 6 Actividad Evaluativa 3P-2020Leonardo Romero JimenezОценок пока нет
- NOM-001-SEDE 2012 Tabla 250-122 Tamaño Mínimo de Los Conductores de Puesta A Tierra para Canalizaciones y EquiposДокумент1 страницаNOM-001-SEDE 2012 Tabla 250-122 Tamaño Mínimo de Los Conductores de Puesta A Tierra para Canalizaciones y EquiposCarlos Yael100% (1)
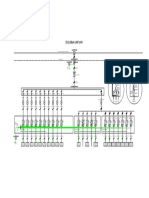
- Esquema UnifilarДокумент1 страницаEsquema UnifilarBelu IОценок пока нет
- ActivosДокумент124 страницыActivosPedro GazparОценок пока нет
- CALICATAДокумент26 страницCALICATAALDAIR JOSUE MUÑOZ MENDOZAОценок пока нет
- Teoria Fresadora Procesos de ManufacturaДокумент9 страницTeoria Fresadora Procesos de ManufacturaLuis Roberto Ortiz ZambranoОценок пока нет
- FICHA SEGUIMIENTO - MATEMATICA 5to BДокумент10 страницFICHA SEGUIMIENTO - MATEMATICA 5to BCiro Miguel Anaya CotrinaОценок пока нет
- Guía - Cómo Elegir Patinetas - MercadoLibreДокумент3 страницыGuía - Cómo Elegir Patinetas - MercadoLibreAlo XpОценок пока нет
- Sistema Hidráulico Piloto 320D CON MOTOR C6.4 IIДокумент14 страницSistema Hidráulico Piloto 320D CON MOTOR C6.4 IIDavid manjarres100% (1)
- Afo Fiber CatalogueДокумент32 страницыAfo Fiber CatalogueZoran PoštinОценок пока нет
- Problemasresueltosdediodosytransistores 140203030132 Phpapp02Документ8 страницProblemasresueltosdediodosytransistores 140203030132 Phpapp02Daniel Kmilo BolañosОценок пока нет
- PROBLEMAS RESUELTOS 2uni de TeresaДокумент8 страницPROBLEMAS RESUELTOS 2uni de TeresaMiguel CondezoОценок пока нет
- Moraleda Cristino Carlos SI02 TareaДокумент10 страницMoraleda Cristino Carlos SI02 TareaCarlos Moraleda CristinoОценок пока нет
- Libro Fibras OpticasДокумент6 страницLibro Fibras Opticasnaibaf naibafОценок пока нет
- 101 Artefactos Que Cambiaron El MundoДокумент4 страницы101 Artefactos Que Cambiaron El MundoGabriela Martinez BaronОценок пока нет
- Insumos Inst. ElectricasДокумент2 страницыInsumos Inst. ElectricasJorge Antonio Irigoin CarranzaОценок пока нет
- REF620 Broch 758020 LRESbДокумент8 страницREF620 Broch 758020 LRESbEfrain Paricahua QuispeОценок пока нет
- Dirección: Teléfono: E-Mail:: Bienes Color Externo Tamaño Peso Color InternoДокумент10 страницDirección: Teléfono: E-Mail:: Bienes Color Externo Tamaño Peso Color Internosalva sanchisОценок пока нет
- Transmisiones TecДокумент146 страницTransmisiones TecLuisalbertx100% (1)
- Examen para Supervisor de IzajesДокумент7 страницExamen para Supervisor de IzajesSalazar Leo86% (7)