Вам также может понравиться
- 22,29 Valor A PagarДокумент1 страница22,29 Valor A PagarRichard AriasОценок пока нет
- Deber 1Документ1 страницаDeber 1Richard AriasОценок пока нет
- Tarea 1Документ3 страницыTarea 1Richard AriasОценок пока нет
- Tarea 2Документ9 страницTarea 2Richard AriasОценок пока нет
- Informe 1Документ7 страницInforme 1Richard AriasОценок пока нет
- Taller 1a Arias Naura RichardДокумент6 страницTaller 1a Arias Naura RichardRichard AriasОценок пока нет
- 4.1.2.9 Packet Tracer - Documenting The Network InstructionsДокумент3 страницы4.1.2.9 Packet Tracer - Documenting The Network InstructionsRaul De La CuevaОценок пока нет
- Tarea 2Документ9 страницTarea 2Richard AriasОценок пока нет
- Medios de TransmisionДокумент5 страницMedios de TransmisionRichard Arias50% (2)
- CUESTIONARIO ANTENASДокумент4 страницыCUESTIONARIO ANTENASRichard AriasОценок пока нет
- 2 CaracterísticasДокумент51 страница2 CaracterísticasJose CedeñoОценок пока нет
- Teoria Electromagnetica 2Документ72 страницыTeoria Electromagnetica 2Richard AriasОценок пока нет
- Cuestionario de Antenas1Документ4 страницыCuestionario de Antenas1Richard AriasОценок пока нет
- Proyecto Final RoboticaДокумент25 страницProyecto Final RoboticaRichard AriasОценок пока нет
- Cartade SmithДокумент17 страницCartade SmithRichard AriasОценок пока нет
- Richard Arias NДокумент8 страницRichard Arias NRichard AriasОценок пока нет
- Dimensionamiento de CompresorДокумент20 страницDimensionamiento de CompresorEduar Denis Espinoza CamposОценок пока нет
- Informe de Inspección de Fuente Hídrica Caño CameliasДокумент14 страницInforme de Inspección de Fuente Hídrica Caño CameliasVillanueva Dannis0% (1)
- Oym FinalДокумент8 страницOym FinalhumbertoОценок пока нет
- Zkbio GoДокумент1 страницаZkbio Gojose medinaОценок пока нет
- Catalogo General Esp 08-09 (15MB) PDFДокумент214 страницCatalogo General Esp 08-09 (15MB) PDFserferraОценок пока нет
- Características Del Medio InalámbricoДокумент76 страницCaracterísticas Del Medio InalámbricoMaricela Elaje AcevedoОценок пока нет
- Inspeccion y Muestreo de Las Materias PR PDFДокумент6 страницInspeccion y Muestreo de Las Materias PR PDFAldemar ValderramaОценок пока нет
- FT Titan XPR HS 80Документ9 страницFT Titan XPR HS 80eliasjosecОценок пока нет
- Examen Procesos IndustrialesДокумент12 страницExamen Procesos IndustrialesatracadunoОценок пока нет
- Ejercicio de Subneteo Con VLSM de Una Red Clase AДокумент9 страницEjercicio de Subneteo Con VLSM de Una Red Clase ADanteballenaОценок пока нет
- Manual Ens10Документ4 страницыManual Ens10FedericoОценок пока нет
- Introducción a la logística internacionalДокумент150 страницIntroducción a la logística internacionalJ Pablo Mendoza Crespo100% (2)
- PRUEBA de Matematica... Adicion Hasta 10000Документ15 страницPRUEBA de Matematica... Adicion Hasta 10000La Marce RamaraboliОценок пока нет
- 12.tablas DinamicasДокумент9 страниц12.tablas DinamicasFELIPE SEPULVEDADОценок пока нет
- Estructura de Precios Octubre 2022Документ1 страницаEstructura de Precios Octubre 2022Carlos GarciaОценок пока нет
- Factura: Wilhelmi Monge SRLДокумент1 страницаFactura: Wilhelmi Monge SRLBrithany Sol ArévaloОценок пока нет
- L ComunicacionS 12B EPOEMALTAДокумент152 страницыL ComunicacionS 12B EPOEMALTAcellochiquiniОценок пока нет
- Conexión metálica CHB_FEXX70_6 verificación diseñoДокумент3 страницыConexión metálica CHB_FEXX70_6 verificación diseñoMarco SaraviaОценок пока нет
- Sinonimos y AntonimosДокумент7 страницSinonimos y AntonimosgrmryОценок пока нет
- Listado Productos KatunДокумент55 страницListado Productos KatunragachilmexОценок пока нет
- Analizador de Redes Pm710 TerminadoДокумент58 страницAnalizador de Redes Pm710 TerminadoMauricio Carrasco LaraОценок пока нет
- CuestionarioДокумент5 страницCuestionarioLiliana GarcíaОценок пока нет
- Protocolo de Rio de JaneiroДокумент6 страницProtocolo de Rio de JaneiroandyОценок пока нет
- Presupuesto CamalДокумент6 страницPresupuesto CamalDimas Gustavo Estacio CastañedaОценок пока нет
- CHUNGAR - VCC PPM 01 - Elmer Mamani 22.03.23 - 66666Документ3 страницыCHUNGAR - VCC PPM 01 - Elmer Mamani 22.03.23 - 66666ELMER TITO MAMANI PAREDESОценок пока нет
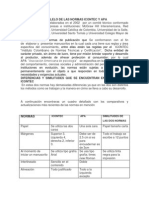
- Paralelo de Las Normas Icontec y ApaДокумент2 страницыParalelo de Las Normas Icontec y ApaHannahSchwarzschildОценок пока нет
- ImprimirДокумент13 страницImprimirCesar AldanaОценок пока нет
- Ramas Auxiliares de La ContabilidadДокумент2 страницыRamas Auxiliares de La ContabilidadNaty BaHu100% (1)
- Cuestionarios MercadotecniaДокумент14 страницCuestionarios Mercadotecniafscoronado100% (1)
- Guia 1 - DebugДокумент6 страницGuia 1 - DebugAnderson GarciaОценок пока нет