Вам также может понравиться
- Untitled DocumentДокумент1 страницаUntitled DocumentnatashaОценок пока нет
- Transport: Transport (Commonly Used in The U.K.), or Transportation (Used in The U.S.), Is The Movement ofДокумент2 страницыTransport: Transport (Commonly Used in The U.K.), or Transportation (Used in The U.S.), Is The Movement ofnatashaОценок пока нет
- Untitled DocumentДокумент1 страницаUntitled DocumentnatashaОценок пока нет
- Car Technical Part 2Документ2 страницыCar Technical Part 2natashaОценок пока нет
- Human-Powered Transport Remains Common in Developing CountriesДокумент3 страницыHuman-Powered Transport Remains Common in Developing CountriesnatashaОценок пока нет
- File FormatДокумент2 страницыFile FormatnatashaОценок пока нет
- Mba Harvard Business School Resume Book4Документ2 страницыMba Harvard Business School Resume Book4natashaОценок пока нет
- Training Letter I II YearДокумент1 страницаTraining Letter I II YearnatashaОценок пока нет
- Lab Session 1: Table 4: Choice of Families Regarding Cooking OilsДокумент1 страницаLab Session 1: Table 4: Choice of Families Regarding Cooking OilsnatashaОценок пока нет
- Rolling Rolling Work Work WorkДокумент1 страницаRolling Rolling Work Work WorknatashaОценок пока нет
- Scribd DumpДокумент2 страницыScribd DumpnatashaОценок пока нет
- Training Letter For B.Tech First and Second Year: WWW - Dce.eduДокумент1 страницаTraining Letter For B.Tech First and Second Year: WWW - Dce.edunatashaОценок пока нет
- Internship Form For Website NewДокумент1 страницаInternship Form For Website NewnatashaОценок пока нет
- Form Project VolunteersДокумент5 страницForm Project VolunteersnatashaОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Pediatric Appendicitis ScoreДокумент6 страницPediatric Appendicitis ScorePinandhito LatukolanОценок пока нет
- Chapter 1 - Steam GenerationДокумент23 страницыChapter 1 - Steam GenerationAzhan FikriОценок пока нет
- Review For Final ExamДокумент29 страницReview For Final ExamhaddanОценок пока нет
- Hope Therapy PDFДокумент18 страницHope Therapy PDFalexОценок пока нет
- Lab 4 SpectrophotometryДокумент6 страницLab 4 SpectrophotometryCheng FuОценок пока нет
- Test A: Two-Dimensional Motion and VectorsДокумент9 страницTest A: Two-Dimensional Motion and VectorsAref DahabrahОценок пока нет
- Study of Educational Aspiration and Socio-Economic Status of Secondary School StudentsДокумент11 страницStudy of Educational Aspiration and Socio-Economic Status of Secondary School StudentsvivekОценок пока нет
- Operating and Maintenance Manual 322375H01 Rev CДокумент82 страницыOperating and Maintenance Manual 322375H01 Rev CGustavo BarbosaОценок пока нет
- Water Level Sensor (Submersible)Документ4 страницыWater Level Sensor (Submersible)anon_975837510Оценок пока нет
- Physics Investigatory Project On Transformers.Документ17 страницPhysics Investigatory Project On Transformers.sridevikamaraj16Оценок пока нет
- 6FM134 XДокумент2 страницы6FM134 XSua Heo100% (1)
- Measurement of Earthing Systems: Central Networks Earthing Manual Section E4Документ45 страницMeasurement of Earthing Systems: Central Networks Earthing Manual Section E4ahmed_k7117Оценок пока нет
- Kou2003 PDFДокумент6 страницKou2003 PDFGe EffgenОценок пока нет
- Proportional Directional Valves: Series LVS08 and LVS12 - Preferred Products ProgrammeДокумент66 страницProportional Directional Valves: Series LVS08 and LVS12 - Preferred Products ProgrammealeksandrОценок пока нет
- Tugas HKSA Deskriptor (Fitriani Choerunnisa (11171013) 3FA1)Документ4 страницыTugas HKSA Deskriptor (Fitriani Choerunnisa (11171013) 3FA1)fitriani choerunnisaОценок пока нет
- Maharashtra State Board of Technical Education (Autonomous) (ISO/IEC - 27001 - 2005 Certified) Winter - 2022 Examination Model Answer Subject: 22619Документ22 страницыMaharashtra State Board of Technical Education (Autonomous) (ISO/IEC - 27001 - 2005 Certified) Winter - 2022 Examination Model Answer Subject: 22619Pratiksha JadhavОценок пока нет
- HP Proliant DL380 G6 Server - Step by StepДокумент9 страницHP Proliant DL380 G6 Server - Step by StepBoss100% (1)
- Carbanions Carbocations and CarboradicalsДокумент21 страницаCarbanions Carbocations and CarboradicalsAnaAmaruОценок пока нет
- Pedestrian Safety AnalysisДокумент12 страницPedestrian Safety Analysispartha sreekarОценок пока нет
- Hide Answer Notebook Notebook Discuss: Here Is The Answer and ExplanationДокумент16 страницHide Answer Notebook Notebook Discuss: Here Is The Answer and ExplanationPayashwini KulkarniОценок пока нет
- Circuits in MatlabДокумент38 страницCircuits in MatlabRana UsmanОценок пока нет
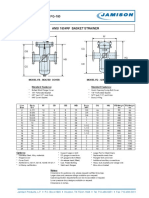
- FB-150 FQ-150 Basket StrainerДокумент1 страницаFB-150 FQ-150 Basket Strainerklich77Оценок пока нет
- Nylon Bag BisДокумент13 страницNylon Bag Bisbsnl.corp.pbОценок пока нет
- MS Word 3Документ2 страницыMS Word 3Misha RaviОценок пока нет
- 3questions Measurements and UncertaintyДокумент2 страницы3questions Measurements and UncertaintyLeanne DerigeОценок пока нет
- DC DC BoostДокумент21 страницаDC DC BoosttrshaaaОценок пока нет
- Pov Nori Apr2007Документ31 страницаPov Nori Apr2007DMRОценок пока нет
- NMEAДокумент38 страницNMEADavidОценок пока нет
- Back To Basics in Optical Communications TechnologyДокумент178 страницBack To Basics in Optical Communications TechnologyAyanОценок пока нет
- MTU-JB RadiatorsДокумент11 страницMTU-JB Radiatorsnanthu7090Оценок пока нет