Вам также может понравиться
- GiroplanoДокумент14 страницGiroplanooscarin1119Оценок пока нет
- Configuration Design and Optimisation Study of A Compound GyroplaneДокумент9 страницConfiguration Design and Optimisation Study of A Compound Gyroplaneteuap100% (1)
- Helicopter DesignДокумент4 страницыHelicopter DesignThomas MouraОценок пока нет
- Small Unmanned Fixed-wing Aircraft Design: A Practical ApproachОт EverandSmall Unmanned Fixed-wing Aircraft Design: A Practical ApproachОценок пока нет
- The Aerodynamics of GyroplanesДокумент356 страницThe Aerodynamics of GyroplanesCharlton Eddie100% (1)
- FlightManual MTOsport 5-2 ENGДокумент122 страницыFlightManual MTOsport 5-2 ENGBen FriskneyОценок пока нет
- Poster GyrocopterДокумент1 страницаPoster GyrocopterIPdaIndiОценок пока нет
- Drag Estimation 08-05Документ21 страницаDrag Estimation 08-05Harika KasamОценок пока нет
- 7 Horiz Tail 1Документ8 страниц7 Horiz Tail 1babumohallahОценок пока нет
- The Gyroplane Its Principles and Its Possibilities by Louis BreguetДокумент56 страницThe Gyroplane Its Principles and Its Possibilities by Louis BreguetHerba4100% (1)
- Burt Rutan Aircraft 3 - 1Документ14 страницBurt Rutan Aircraft 3 - 1mdg21100% (1)
- Always Another Dawn: The Story Of A Rocket Test PilotОт EverandAlways Another Dawn: The Story Of A Rocket Test PilotРейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Technical, Aerodynamic & Performance Aspects of a Helicopter: A Manual for Helicopter Pilots and Engineers Who Want to Know MoreОт EverandThe Technical, Aerodynamic & Performance Aspects of a Helicopter: A Manual for Helicopter Pilots and Engineers Who Want to Know MoreРейтинг: 3 из 5 звезд3/5 (2)
- Understanding Performance Flight Testing: Kitplanes and Production AircraftОт EverandUnderstanding Performance Flight Testing: Kitplanes and Production AircraftРейтинг: 5 из 5 звезд5/5 (1)
- No Visible Horizon: Surviving the World's Most Dangerous SportОт EverandNo Visible Horizon: Surviving the World's Most Dangerous SportРейтинг: 4 из 5 звезд4/5 (6)
- Development of The Autogiro A Technical Perspective PDFДокумент17 страницDevelopment of The Autogiro A Technical Perspective PDFjotaefe_culpОценок пока нет
- Helicopter Control Systems - A History, Prouty - JOGC V26N1 2003Документ7 страницHelicopter Control Systems - A History, Prouty - JOGC V26N1 2003lgrome73100% (2)
- Proadvice 3 - Aileron SizingДокумент12 страницProadvice 3 - Aileron SizingSnorri Gudmundsson100% (1)
- Propeller Design Workshop Part IIДокумент36 страницPropeller Design Workshop Part IIKhalida BekrentchirОценок пока нет
- Aircraft Design Equation SheetДокумент2 страницыAircraft Design Equation SheetCara VanОценок пока нет
- Accidents CanardsДокумент7 страницAccidents Canardsranickng1100% (1)
- How The Rescue Hoist Was Born - Sergei Sikorsky - Professional Pilot Mag - Feb, 2006Документ4 страницыHow The Rescue Hoist Was Born - Sergei Sikorsky - Professional Pilot Mag - Feb, 2006killjoymsfОценок пока нет
- Light Aircraft StabilityДокумент130 страницLight Aircraft StabilityJack AzadОценок пока нет
- Optimizing Blended Winglet Radii On Homebuilt Canard Aircraft PDFДокумент9 страницOptimizing Blended Winglet Radii On Homebuilt Canard Aircraft PDFYvess100% (1)
- Taildragger Tales: My Late-Blooming Romance with a Piper Cub and Her Younger SistersОт EverandTaildragger Tales: My Late-Blooming Romance with a Piper Cub and Her Younger SistersРейтинг: 2 из 5 звезд2/5 (1)
- Seaplanes along the Inside Passage: The Highs and Lows of a Modern Bush PilotОт EverandSeaplanes along the Inside Passage: The Highs and Lows of a Modern Bush PilotРейтинг: 5 из 5 звезд5/5 (1)
- Design and Construction of A Remote Piloted Flying WingДокумент187 страницDesign and Construction of A Remote Piloted Flying WinglufabaoОценок пока нет
- Wing Theory in Supersonic Flow: International Series of Monographs in Aeronautics and AstronauticsОт EverandWing Theory in Supersonic Flow: International Series of Monographs in Aeronautics and AstronauticsОценок пока нет
- Flying WingДокумент7 страницFlying Wingp6a4nduОценок пока нет
- 'Flying from My Mind': Innovative and Record-Breaking Microlight and Aircraft DesignsОт Everand'Flying from My Mind': Innovative and Record-Breaking Microlight and Aircraft DesignsОценок пока нет
- Flight and Operation Manualfor Gyroplane CalidusДокумент132 страницыFlight and Operation Manualfor Gyroplane CaliduslegouluОценок пока нет
- Fighting Cockpits: In the Pilot's Seat of Great Military Aircraft from World War I to TodayОт EverandFighting Cockpits: In the Pilot's Seat of Great Military Aircraft from World War I to TodayОценок пока нет
- Mini Helicóptero 1Документ130 страницMini Helicóptero 1Abelardo Luna GarciaОценок пока нет
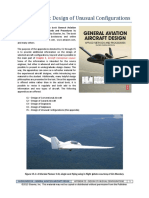
- App-C5-Design of Unusual Configurations PDFДокумент22 страницыApp-C5-Design of Unusual Configurations PDFmiguelОценок пока нет
- Aviation Facts & Rumors: Book 2: Aviation Facts & Rumors, #2От EverandAviation Facts & Rumors: Book 2: Aviation Facts & Rumors, #2Оценок пока нет
- Aerotowing Gliders: A Guide to Towing Gliders, with an Emphasis on SafetyОт EverandAerotowing Gliders: A Guide to Towing Gliders, with an Emphasis on SafetyОценок пока нет
- Contact Flying Revised: Techniques for Maneuvering Flight Including Takeoff and LandingОт EverandContact Flying Revised: Techniques for Maneuvering Flight Including Takeoff and LandingОценок пока нет
- Gyro PlaneДокумент10 страницGyro PlaneVincent S Ryan100% (12)
- Propeller Aerodynamics: The History, Aerodynamics & Operation of Aircraft PropellersОт EverandPropeller Aerodynamics: The History, Aerodynamics & Operation of Aircraft PropellersРейтинг: 4.5 из 5 звезд4.5/5 (3)
- 750 Flyer 2pageДокумент2 страницы750 Flyer 2pagemacshilОценок пока нет
- Автожир Jt 5Документ11 страницАвтожир Jt 5Sergey100% (1)
- Helicopter Boys: True Tales from Operators of Military and Civilian RotorcraftОт EverandHelicopter Boys: True Tales from Operators of Military and Civilian RotorcraftРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Basic Theory of Helicopter (Eurocopter)Документ77 страницBasic Theory of Helicopter (Eurocopter)aeroacademic100% (4)
- Cozy Vs Long EZДокумент4 страницыCozy Vs Long EZAbdul Adavuruku Okinobanyi100% (2)
- Gbeer 50Документ132 страницыGbeer 50Audinda LeiniaОценок пока нет
- Math g7 m1 Topic C Lesson 11 TeacherДокумент9 страницMath g7 m1 Topic C Lesson 11 TeacherAntonio PerezОценок пока нет
- Brookes Bell-Carriage of SulphurДокумент4 страницыBrookes Bell-Carriage of SulphurAntonio Perez100% (1)
- TESON Benchmark Report and Overview PDFДокумент32 страницыTESON Benchmark Report and Overview PDFAntonio PerezОценок пока нет
- Ad 630Документ13 страницAd 630Antonio PerezОценок пока нет
- Internal Rotating Inspection SystemДокумент2 страницыInternal Rotating Inspection SystemAntonio PerezОценок пока нет
- Ramesh Singh - NACE MP - December 2009 - MP - Hydrocarbon Reformer TubesДокумент5 страницRamesh Singh - NACE MP - December 2009 - MP - Hydrocarbon Reformer TubesAntonio PerezОценок пока нет
- Ielts Test Dates 2017Документ1 страницаIelts Test Dates 2017Antonio PerezОценок пока нет
- Ferrite Limitation For SS316LДокумент12 страницFerrite Limitation For SS316LAntonio PerezОценок пока нет
- LM 96570 Texas InstrumentДокумент33 страницыLM 96570 Texas InstrumentAntonio PerezОценок пока нет
- A General Theory of The Autogyro.: Reports and Memoranda No. 1111. November, 1926Документ41 страницаA General Theory of The Autogyro.: Reports and Memoranda No. 1111. November, 1926Antonio PerezОценок пока нет
- Engineering Notation 1. 2. 3. 4. 5.: T Solution:fДокумент2 страницыEngineering Notation 1. 2. 3. 4. 5.: T Solution:fJeannie ReguyaОценок пока нет
- Sky ChemicalsДокумент1 страницаSky ChemicalsfishОценок пока нет
- Zelio Control RM35UA13MWДокумент3 страницыZelio Control RM35UA13MWSerban NicolaeОценок пока нет
- Shahroz Khan CVДокумент5 страницShahroz Khan CVsid202pkОценок пока нет
- G.R. No. 185449, November 12, 2014 Del Castillo Digest By: DOLARДокумент2 страницыG.R. No. 185449, November 12, 2014 Del Castillo Digest By: DOLARTheodore DolarОценок пока нет
- Anaphylaxis Wallchart 2022Документ1 страницаAnaphylaxis Wallchart 2022Aymane El KandoussiОценок пока нет
- Termination LetterДокумент2 страницыTermination Letterultakam100% (1)
- Getting StartedДокумент45 страницGetting StartedMuhammad Owais Bilal AwanОценок пока нет
- Production - The Heart of Organization - TBDДокумент14 страницProduction - The Heart of Organization - TBDSakshi G AwasthiОценок пока нет
- Sourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyДокумент58 страницSourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyAlaa Al HarbiОценок пока нет
- CNC USB English ManualДокумент31 страницаCNC USB English ManualHarold Hernan MuñozОценок пока нет
- Ajp Project (1) MergedДокумент22 страницыAjp Project (1) MergedRohit GhoshtekarОценок пока нет
- Marine Lifting and Lashing HandbookДокумент96 страницMarine Lifting and Lashing HandbookAmrit Raja100% (1)
- P 1 0000 06 (2000) - EngДокумент34 страницыP 1 0000 06 (2000) - EngTomas CruzОценок пока нет
- Sample Annual BudgetДокумент4 страницыSample Annual BudgetMary Ann B. GabucanОценок пока нет
- CH 1 India Economy On The Eve of Independence QueДокумент4 страницыCH 1 India Economy On The Eve of Independence QueDhruv SinghalОценок пока нет
- Polytropic Process1Документ4 страницыPolytropic Process1Manash SinghaОценок пока нет
- Reverse Engineering in Rapid PrototypeДокумент15 страницReverse Engineering in Rapid PrototypeChaubey Ajay67% (3)
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Документ7 страницExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghОценок пока нет
- Pneumatic Fly Ash Conveying0 PDFДокумент1 страницаPneumatic Fly Ash Conveying0 PDFnjc6151Оценок пока нет
- Arduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash GuptaДокумент3 страницыArduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash Guptaabhishek kumarОценок пока нет
- Fake PDFДокумент2 страницыFake PDFJessicaОценок пока нет
- Hager Pricelist May 2014Документ64 страницыHager Pricelist May 2014rajinipre-1Оценок пока нет
- Wendi C. Lassiter, Raleigh NC ResumeДокумент2 страницыWendi C. Lassiter, Raleigh NC ResumewendilassiterОценок пока нет
- CV Ovais MushtaqДокумент4 страницыCV Ovais MushtaqiftiniaziОценок пока нет
- Evaluating Project Scheduling and Due Assignment Procedures An Experimental AnalysisДокумент19 страницEvaluating Project Scheduling and Due Assignment Procedures An Experimental AnalysisJunior Adan Enriquez CabezudoОценок пока нет
- Online EarningsДокумент3 страницыOnline EarningsafzalalibahttiОценок пока нет
- Sustainable Urban Mobility Final ReportДокумент141 страницаSustainable Urban Mobility Final ReportMaria ClapaОценок пока нет
- CDKR Web v0.2rcДокумент3 страницыCDKR Web v0.2rcAGUSTIN SEVERINOОценок пока нет
- General Field Definitions PlusДокумент9 страницGeneral Field Definitions PlusOscar Alberto ZambranoОценок пока нет