Вам также может понравиться
- Armónicas en Sistemas Eléctricos IndustrialesОт EverandArmónicas en Sistemas Eléctricos IndustrialesРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311От EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Рейтинг: 4.5 из 5 звезд4.5/5 (2)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFОт EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Dinámica de estructuras: Sistemas de un grado de libertadОт EverandDinámica de estructuras: Sistemas de un grado de libertadРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónОт EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- Problemas resueltos de Hidráulica de CanalesОт EverandProblemas resueltos de Hidráulica de CanalesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoОт EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoРейтинг: 4 из 5 звезд4/5 (4)
- Mantenimiento de motores térmicos de dos y cuatro tiempos. TMVG0409От EverandMantenimiento de motores térmicos de dos y cuatro tiempos. TMVG0409Рейтинг: 4 из 5 звезд4/5 (1)
- Cálculo de Fallas IEEE Std. 141Документ73 страницыCálculo de Fallas IEEE Std. 141Miguel Ln100% (10)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasОт EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasРейтинг: 2.5 из 5 звезд2.5/5 (3)
- UF0902 - Caracterización de instalaciones de climatizaciónОт EverandUF0902 - Caracterización de instalaciones de climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- Entregable 1 Logistica AvanzadaДокумент10 страницEntregable 1 Logistica AvanzadaHéctor ivan Avaroa Aguila100% (1)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasОт EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasРейтинг: 5 из 5 звезд5/5 (1)
- Métodos Matriciales para ingenieros con MATLABОт EverandMétodos Matriciales para ingenieros con MATLABРейтинг: 5 из 5 звезд5/5 (1)
- Carta Eleccion Modalidad de TitulacionДокумент2 страницыCarta Eleccion Modalidad de TitulacionRodrigo Millares CardenasОценок пока нет
- UF1026 - Caracterización de procesos e instalaciones frigoríficasОт EverandUF1026 - Caracterización de procesos e instalaciones frigoríficasРейтинг: 4 из 5 звезд4/5 (1)
- Practica #10 Descomposción Catalitica Del Peróxido de HidrógenoДокумент15 страницPractica #10 Descomposción Catalitica Del Peróxido de Hidrógenocachorra118600% (1)
- Control Ángulo de Ataque AerogeneradoresДокумент7 страницControl Ángulo de Ataque Aerogeneradorespizzicato_strОценок пока нет
- 02.03.04 Geocompuesto Drenaje 3Документ3 страницы02.03.04 Geocompuesto Drenaje 3meratoОценок пока нет
- Defender+300+TDi+MY96+ +Manual+de+ReparacionesДокумент546 страницDefender+300+TDi+MY96+ +Manual+de+ReparacionesXaxy Merbuster100% (1)
- Problemas III Continua Sin SolucionesДокумент13 страницProblemas III Continua Sin SolucionesPascual MaféОценок пока нет
- Ejercicios de Integrales de Línea, Superficie y VolumenОт EverandEjercicios de Integrales de Línea, Superficie y VolumenРейтинг: 4 из 5 звезд4/5 (2)
- Ejercicios de Aplicacion de CompensadoresДокумент10 страницEjercicios de Aplicacion de CompensadoresPablo García Pérez0% (1)
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108От EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Оценок пока нет
- Sistemas Automaticos Control Hasta Mod 10 11Документ34 страницыSistemas Automaticos Control Hasta Mod 10 11Carmen VillanuevaОценок пока нет
- Control PID en Un Sistema de CalefacciónДокумент10 страницControl PID en Un Sistema de CalefacciónFranklinSilvaОценок пока нет
- Como Parametrizar Relays ZIVДокумент671 страницаComo Parametrizar Relays ZIVbbauteОценок пока нет
- Sistemas 1er2do Orden Ejercicios ResueltosДокумент10 страницSistemas 1er2do Orden Ejercicios ResueltosOrlando Pérez Vargas50% (2)
- Examenes Rae 0708Документ40 страницExamenes Rae 0708Milton Fonseca ZuritaОценок пока нет
- Ejercicios Unidad2 2013 2 PDFДокумент3 страницыEjercicios Unidad2 2013 2 PDFAlejandro Velez SalasОценок пока нет
- Tarea 2.1 CaroДокумент14 страницTarea 2.1 CaroDaniel PancheОценок пока нет
- 7 Funcion de Transferencia Primer OrdenДокумент13 страниц7 Funcion de Transferencia Primer OrdenAna MelendezОценок пока нет
- Problemas PDFДокумент67 страницProblemas PDFHenry ArenasОценок пока нет
- Ejercicio Ilustrativo CSTRДокумент23 страницыEjercicio Ilustrativo CSTRGuarayo Ormachea AlejandroОценок пока нет
- Clase 3Документ45 страницClase 3hmecheverryhОценок пока нет
- Laboratorio 2 InformeДокумент13 страницLaboratorio 2 InformeAlejandro Morales VelezОценок пока нет
- Tarea 1Документ17 страницTarea 1Karlita GaspitoОценок пока нет
- Ingenieria ElectronicaДокумент18 страницIngenieria ElectronicaJimmie Valverde MontalvoОценок пока нет
- Unidad 2 Etapa 3 Sistemas Dinamicos Desarrollo Literal CДокумент6 страницUnidad 2 Etapa 3 Sistemas Dinamicos Desarrollo Literal CLeafar ZerepОценок пока нет
- Discretizacion y Simulacion Del Modelo de Un Sistema de Control de TemperaturaДокумент8 страницDiscretizacion y Simulacion Del Modelo de Un Sistema de Control de TemperaturaCsar PariapazaОценок пока нет
- Coleccion Problem As CA 3Документ134 страницыColeccion Problem As CA 3Ronny RamírezОценок пока нет
- Ejercicios Propuestos de Mediciones Eléctricas.Документ19 страницEjercicios Propuestos de Mediciones Eléctricas.Shanks Hernan AH100% (3)
- Control TemperaturaДокумент6 страницControl Temperaturajrockb1234Оценок пока нет
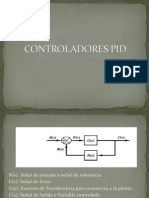
- Controladores PidДокумент27 страницControladores PidAlan GrajedaОценок пока нет
- ProblemasДокумент67 страницProblemasMelisa Del Pilar Rios DominguezОценок пока нет
- Lab.1 Control No Lineal Por Realimentación de Estados de Nivel de Tanques InterconectadosДокумент9 страницLab.1 Control No Lineal Por Realimentación de Estados de Nivel de Tanques InterconectadosOmar Ruiz Rodríguez100% (1)
- TAREA #5. Controladores y CompensadoresДокумент5 страницTAREA #5. Controladores y CompensadoresVictor Hugo0% (1)
- 05 Fase1Документ10 страниц05 Fase1Edwin Javier Diaz PerezОценок пока нет
- R4 Control 2Документ15 страницR4 Control 2David Mtz SotoОценок пока нет
- Control de CascadaДокумент17 страницControl de CascadajimОценок пока нет
- ApprobДокумент6 страницApprobKhevin Lizano BorreroОценок пока нет
- Trabajo Colaborativo 1 Grupo 203040 - 2.docx Control AnalogoДокумент16 страницTrabajo Colaborativo 1 Grupo 203040 - 2.docx Control AnalogoGademaraОценок пока нет
- 1.6 Aplicación Numérica para Estudios de EstabilidadДокумент41 страница1.6 Aplicación Numérica para Estudios de EstabilidadFam Vidal FernandezОценок пока нет
- Teoría de Control - Problemas IntegradoresДокумент17 страницTeoría de Control - Problemas Integradoresjulietlm73Оценок пока нет
- Wilsonarevalo Tarea1Документ24 страницыWilsonarevalo Tarea1Jonathan Lozano CastilloОценок пока нет
- Respuesta TransitoriaДокумент10 страницRespuesta TransitoriaAnibal Isaac Farfan FaundezОценок пока нет
- Módulo 15Документ6 страницMódulo 15Martin Medrano PradoОценок пока нет
- Practica SERVOMECANISMO NEUMÁTICOДокумент10 страницPractica SERVOMECANISMO NEUMÁTICOClara CastilloОценок пока нет
- Hoja de Problemas #2 Andia PDFДокумент6 страницHoja de Problemas #2 Andia PDFPaola Sanchez ContrerasОценок пока нет
- Sintonizacion de ControladoresДокумент21 страницаSintonizacion de ControladoresZ Erandi Cortes RodriguezОценок пока нет
- Sistema de Control - Tarea N°2Документ46 страницSistema de Control - Tarea N°2Pablo RiquelmeОценок пока нет
- Modelado Matemático de Sistemas FísicosДокумент44 страницыModelado Matemático de Sistemas FísicosRicardoSntiagoОценок пока нет
- Re Sueltos 01Документ12 страницRe Sueltos 01Jesus Dionardy Contreras MoraОценок пока нет
- Prueba No 4. Introduccion Al ControlДокумент10 страницPrueba No 4. Introduccion Al ControlJisella SuazaОценок пока нет
- 1º CFGMH Memoria FinalДокумент6 страниц1º CFGMH Memoria FinalPascual MaféОценок пока нет
- Admision Ciclos FormativosДокумент4 страницыAdmision Ciclos FormativosPascual MaféОценок пока нет
- 1º CFGMH Electrotecnia Memoria FinalДокумент6 страниц1º CFGMH Electrotecnia Memoria FinalPascual MaféОценок пока нет
- 2º CFGMH Instalaciones de Distribución Memoria FinalДокумент7 страниц2º CFGMH Instalaciones de Distribución Memoria FinalPascual MaféОценок пока нет
- 1º CFGMH Memoria FinalДокумент6 страниц1º CFGMH Memoria FinalPascual MaféОценок пока нет
- 1º CFGMH Electrotecnia Memoria FinalДокумент6 страниц1º CFGMH Electrotecnia Memoria FinalPascual MaféОценок пока нет
- Automatizacion Industrial.06.Gama S7 200Документ1 страницаAutomatizacion Industrial.06.Gama S7 200Pascual MaféОценок пока нет
- Final Examen Electrónica 2020Документ4 страницыFinal Examen Electrónica 2020Pascual MaféОценок пока нет
- Tema 1 PresentacionДокумент85 страницTema 1 PresentacionPascual MaféОценок пока нет
- EXTRAORDINARIO Electrónica 2020Документ4 страницыEXTRAORDINARIO Electrónica 2020Pascual MaféОценок пока нет
- Extraordinario Electrotecnia 2021Документ2 страницыExtraordinario Electrotecnia 2021Pascual MaféОценок пока нет
- Ejercicio de AcotaciónДокумент1 страницаEjercicio de AcotaciónPascual MaféОценок пока нет
- Final Examen Electrotecnia 2021Документ2 страницыFinal Examen Electrotecnia 2021Pascual MaféОценок пока нет
- Automatizacion Industrial.07.BotonerasДокумент1 страницаAutomatizacion Industrial.07.BotonerasPascual MaféОценок пока нет
- Problemas-Iv-Continua-Sin Solucion PDFДокумент8 страницProblemas-Iv-Continua-Sin Solucion PDFPascual MaféОценок пока нет
- Practica 7 Profibus FDL PDFДокумент22 страницыPractica 7 Profibus FDL PDFRodrigoBurgosОценок пока нет
- Practica 3Документ6 страницPractica 3Marco A. SobrevillaОценок пока нет
- Problemas I Continua Sin Soluciones PDFДокумент4 страницыProblemas I Continua Sin Soluciones PDFPascual MaféОценок пока нет
- Problemas II Continua Sin Soluciones PDFДокумент7 страницProblemas II Continua Sin Soluciones PDFPascual MaféОценок пока нет
- Libro IRD ModifДокумент160 страницLibro IRD ModifPascual MaféОценок пока нет
- Apuntes08 CondensadoresДокумент17 страницApuntes08 CondensadoresPascual MaféОценок пока нет
- ElectricidadДокумент6 страницElectricidadLotteDomineОценок пока нет
- Ejemplo Multiestancia S7-300Документ9 страницEjemplo Multiestancia S7-300Marco Antonio Sobrevilla GonzálezОценок пока нет
- Prontuario Instalaciones de FRIO MUY BUENOДокумент24 страницыProntuario Instalaciones de FRIO MUY BUENOv_medinaОценок пока нет
- Tipos de CentralesДокумент23 страницыTipos de CentralesLeonardo Chambilla VegaОценок пока нет
- HOJA DE INSTALACION DE ENLACElДокумент2 страницыHOJA DE INSTALACION DE ENLACElPascual MaféОценок пока нет
- HOJA DE INSTALACION DE ENLACElДокумент2 страницыHOJA DE INSTALACION DE ENLACElPascual MaféОценок пока нет
- HOJA DE INSTALACION DE ENLACElДокумент2 страницыHOJA DE INSTALACION DE ENLACElPascual MaféОценок пока нет
- Aceites Lubricantes para Transmision AutomaticaДокумент2 страницыAceites Lubricantes para Transmision AutomaticaDaniel LeónОценок пока нет
- PTS Armado de AndamiosДокумент25 страницPTS Armado de AndamiosCristobal EscobarОценок пока нет
- Instituto Tecnológico Superior de Uruapan: "Reporte de Investigación"Документ12 страницInstituto Tecnológico Superior de Uruapan: "Reporte de Investigación"CristianОценок пока нет
- Curso Partes Componentes Motoniveladora Funciones Caracteristicas Aplicaciones Trabajos Operaciones PDFДокумент21 страницаCurso Partes Componentes Motoniveladora Funciones Caracteristicas Aplicaciones Trabajos Operaciones PDFjuan pablo martinezОценок пока нет
- Fase 2 - Aplicar La Administración Por Objetivos - Carlos O. Molina A.Документ12 страницFase 2 - Aplicar La Administración Por Objetivos - Carlos O. Molina A.JorgeEliecerRodriguez100% (3)
- Programa EléctricoДокумент50 страницPrograma Eléctricomonica lopezОценок пока нет
- P.C.E y Los Fluidos Energeticos IndustrialesДокумент41 страницаP.C.E y Los Fluidos Energeticos Industrialescacbcarlo100% (1)
- Resumen Del Transporte en Las Ciudades Del PerúДокумент2 страницыResumen Del Transporte en Las Ciudades Del PerúBDNОценок пока нет
- Matriz de Riesgo Obras Viales 15 - 09 - 2020Документ273 страницыMatriz de Riesgo Obras Viales 15 - 09 - 2020Carlo Andres GajardoОценок пока нет
- Distribución de Aguas BlancasДокумент36 страницDistribución de Aguas BlancasDany TasánОценок пока нет
- REPORTE 2 Diagramas de ProcesosДокумент13 страницREPORTE 2 Diagramas de ProcesosDiego Grajeda0% (1)
- Calendario Juvenil AДокумент6 страницCalendario Juvenil APedro19461946Оценок пока нет
- Estilos Sin ComponentesДокумент84 страницыEstilos Sin ComponentesvalerongaОценок пока нет
- Estandarización Del Proceso de Armado para Las Flechas de Los Extrusores de Las Líneas de Extrusión de SabicДокумент38 страницEstandarización Del Proceso de Armado para Las Flechas de Los Extrusores de Las Líneas de Extrusión de SabicGabriel HuertaОценок пока нет
- 487339Документ10 страниц487339Steve GomezОценок пока нет
- 5 CunetasДокумент28 страниц5 CunetasLisa FergusonОценок пока нет
- TP 01 TDM UTN - NormalizacionДокумент16 страницTP 01 TDM UTN - NormalizacionMartínОценок пока нет
- Diagrama para El Proceso de CiruelasДокумент3 страницыDiagrama para El Proceso de CiruelasoverpazОценок пока нет
- North Point Mall Centro ComercialДокумент12 страницNorth Point Mall Centro ComercialLinaCortesОценок пока нет
- Replica IWC Da Vinci Iw375803 Reloj Automático para HombresДокумент2 страницыReplica IWC Da Vinci Iw375803 Reloj Automático para HombresLi LeiОценок пока нет
- Gestion Empresarial CasosДокумент16 страницGestion Empresarial CasosRazzell RodriguezОценок пока нет
- Residuos Organicos en BucaramangaДокумент4 страницыResiduos Organicos en BucaramangaMauricio HerreraОценок пока нет
- 4) Vehículos CTD en Minas SubterráneasДокумент22 страницы4) Vehículos CTD en Minas SubterráneasClebert Conde OmonteОценок пока нет
- UNEX Bridas Catalogo15Документ10 страницUNEX Bridas Catalogo15esmelleОценок пока нет