Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Three Phase TransformersДокумент15 страницThree Phase TransformersnandhakumarmeОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Unit 4 LP - Nandhakumar AДокумент17 страницUnit 4 LP - Nandhakumar AnandhakumarmeОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Miles To KMДокумент2 страницыMiles To KMnandhakumarmeОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Structure of Power SystemДокумент14 страницStructure of Power Systemnandhakumarme100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Generator ProtectionДокумент5 страницGenerator ProtectionBala MОценок пока нет
- Auxiliary Word For RBT, BIT-1Документ1 страницаAuxiliary Word For RBT, BIT-1nandhakumarmeОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- RelaysДокумент1 страницаRelaysnandhakumarmeОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- 123Документ1 страница123nandhakumarmeОценок пока нет
- Pole-Amplitude ModulationДокумент6 страницPole-Amplitude ModulationnandhakumarmeОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- 15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesДокумент3 страницы15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesnandhakumarmeОценок пока нет
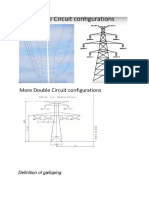
- Double CircuitДокумент10 страницDouble CircuitnandhakumarmeОценок пока нет
- Operator AДокумент3 страницыOperator AnandhakumarmeОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- S7 Attendance Summary Report 141EE123 To 141EE144Документ2 страницыS7 Attendance Summary Report 141EE123 To 141EE144nandhakumarmeОценок пока нет
- One Mark QueДокумент27 страницOne Mark QuenandhakumarmeОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- CLM-RBT Steps in DetailДокумент1 страницаCLM-RBT Steps in DetailnandhakumarmeОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Pe 13Документ3 страницыPe 13nandhakumarmeОценок пока нет
- New Microsoft Word DocumentДокумент10 страницNew Microsoft Word DocumentnandhakumarmeОценок пока нет
- Power Electronics Objective Questions With Answers: Part-10: Answer: BДокумент3 страницыPower Electronics Objective Questions With Answers: Part-10: Answer: BnandhakumarmeОценок пока нет
- Circuit Breakers IДокумент21 страницаCircuit Breakers InandhakumarmeОценок пока нет
- Gate Questions 2Документ6 страницGate Questions 2nandhakumarmeОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Lic QPДокумент4 страницыLic QPnandhakumarmeОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- BLDCДокумент42 страницыBLDCnandhakumarmeОценок пока нет
- Procurement of Consumable ItemsДокумент16 страницProcurement of Consumable ItemsnandhakumarmeОценок пока нет
- Obtain The Boolean Expression For The Circuit and Verify Its Truth TableДокумент2 страницыObtain The Boolean Expression For The Circuit and Verify Its Truth TablenandhakumarmeОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Every DayДокумент4 страницыEvery DaynandhakumarmeОценок пока нет
- 1.1 Energy BalanceДокумент25 страниц1.1 Energy BalancenandhakumarmeОценок пока нет
- Thyristor MCQДокумент6 страницThyristor MCQnandhakumarme0% (3)
- Lic QPДокумент4 страницыLic QPnandhakumarmeОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- 1.3 Series and Parallel Resistance NewДокумент32 страницы1.3 Series and Parallel Resistance Newnandhakumarme64% (11)
- Pole-Amplitude ModulationДокумент6 страницPole-Amplitude ModulationnandhakumarmeОценок пока нет
- APTRANSCO - APGENCO Assistant Engineer AE Electrical Previous Question Papers - Indian ShoutДокумент10 страницAPTRANSCO - APGENCO Assistant Engineer AE Electrical Previous Question Papers - Indian ShoutumamaheshwarraoОценок пока нет
- Construction and Working Principles of BLDC MotorДокумент24 страницыConstruction and Working Principles of BLDC Motormahadeva prasad m sОценок пока нет
- EEE259 Electrical Drives and Controls QBДокумент10 страницEEE259 Electrical Drives and Controls QBkannanchammyОценок пока нет
- Motor-Catalog English 2013 PDFДокумент80 страницMotor-Catalog English 2013 PDFILham Dwi PutraОценок пока нет
- Scalar and Vector Control of IM DriveДокумент9 страницScalar and Vector Control of IM DriveLasitha Dananjaya RanawakkageОценок пока нет
- Permanent Magnet DC MotorДокумент4 страницыPermanent Magnet DC MotorSourav Kumar100% (1)
- Worksheet of EDC - 2018Документ2 страницыWorksheet of EDC - 2018pranavmurthyОценок пока нет
- AC motor price list with technical specsДокумент8 страницAC motor price list with technical specsVijeesh VijayanОценок пока нет
- IEC 56-63-71-80 - Nema Frame 56 D.C. Motors: Installation and MaintenanceДокумент7 страницIEC 56-63-71-80 - Nema Frame 56 D.C. Motors: Installation and MaintenanceJoel EncaladaОценок пока нет
- Electrical Motors and Variable Frequency Drives Energy Efficiency Reference GuideДокумент257 страницElectrical Motors and Variable Frequency Drives Energy Efficiency Reference GuideFelipe Gustavo100% (1)
- Capability chart of a Doubly Fed Induction Generation based on its ratings and stability marginДокумент6 страницCapability chart of a Doubly Fed Induction Generation based on its ratings and stability marginBalu MОценок пока нет
- Important electrical engineering questions and informationДокумент12 страницImportant electrical engineering questions and informationMoucha JustdoitОценок пока нет
- Solved Problems on Synchronous MotorsДокумент16 страницSolved Problems on Synchronous MotorsKeerthiSaha100% (1)
- DC Geared MotorДокумент8 страницDC Geared MotorThomas P JohnОценок пока нет
- Electrical Machine MCQДокумент56 страницElectrical Machine MCQmohammedalatawi66Оценок пока нет
- Rewinding A BLDC MotorДокумент22 страницыRewinding A BLDC MotorUday WankarОценок пока нет
- Stepping Motors and Their Microprocessor Controls (1984)Документ252 страницыStepping Motors and Their Microprocessor Controls (1984)Athiesh Kumar100% (2)
- IS 325.1996 - 3 Phase Induction MotorsДокумент18 страницIS 325.1996 - 3 Phase Induction MotorsMeghavahina100% (1)
- Performance Improvements From Slotless Motors: Director of Business DevelopmetДокумент12 страницPerformance Improvements From Slotless Motors: Director of Business Developmetمعراج الرحمانОценок пока нет
- 18 Ee 442Документ2 страницы18 Ee 442Kubera UОценок пока нет
- Modelado Matemático de Un Servomotor TrifásicoДокумент15 страницModelado Matemático de Un Servomotor TrifásicoSebastian LunaОценок пока нет
- Medical Application of BLDCДокумент5 страницMedical Application of BLDCAbd Al HAmidОценок пока нет
- Sew-Eurodrive, Inc.: MotorДокумент1 страницаSew-Eurodrive, Inc.: MotorcmaradiagaОценок пока нет
- Sychronous Type Overview 4 Pole Models: Basic - TypesДокумент2 страницыSychronous Type Overview 4 Pole Models: Basic - TypesRichard Leo MoroniОценок пока нет
- 3-Phase Synchronous Motor ExperimentДокумент13 страниц3-Phase Synchronous Motor ExperimentRoanaqul Islam PracchoОценок пока нет
- Repulsion MotorДокумент13 страницRepulsion MotorDeether Josh CadevidaОценок пока нет
- Electrical Machines by Mr. S. K. Sahdev1Документ980 страницElectrical Machines by Mr. S. K. Sahdev1dea boazynha100% (1)
- Chapter Two on ServomotorsДокумент48 страницChapter Two on ServomotorsBehnamОценок пока нет
- 8 - Permanent Capacitor Single-Phase InductionДокумент5 страниц8 - Permanent Capacitor Single-Phase InductionBhaskarjyoti DuttaОценок пока нет
- Electrical - Electrical Engineering Pocketbook Handbook - Koffler - 1993Документ49 страницElectrical - Electrical Engineering Pocketbook Handbook - Koffler - 1993Rotax_KidОценок пока нет
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4.5 из 5 звезд4.5/5 (542)
- 8051 Microcontroller: An Applications Based IntroductionОт Everand8051 Microcontroller: An Applications Based IntroductionРейтинг: 5 из 5 звезд5/5 (6)
- Understanding Automotive Electronics: An Engineering PerspectiveОт EverandUnderstanding Automotive Electronics: An Engineering PerspectiveРейтинг: 3.5 из 5 звезд3.5/5 (16)
- Build Your Own Electric Vehicle, Third EditionОт EverandBuild Your Own Electric Vehicle, Third EditionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsОт EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsРейтинг: 4 из 5 звезд4/5 (1)