Академический Документы
Профессиональный Документы
Культура Документы
Diseño de Fajas Acalanadas
Загружено:
Elvis DiazАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Diseño de Fajas Acalanadas
Загружено:
Elvis DiazАвторское право:
Доступные форматы
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Captulo 1
ECUACIONES FUNDAMENTALES
1 INTRODUCCIN
La mecnica de los medios continuos estudia los slidos y los fluidos desde un punto de vista
macroscpico basado en la mecnica clsica.
En este captulo nos dedicamos nicamente al estudio de slidos. A tal fin definimos los
desplazamientos y las fuerzas como vectores y las deformaciones y tensiones como tensores. Estas
variables estn esquematizadas en la Figura 1.
Campos vectoriales
Campos tensoriales
Campos geomtricos
Campos elsticos
Desplazamientos
Fuerzas
Deformaciones
Tensiones
Figura 1: Campos asociados a un problema elstico
Existen relaciones que permiten relacionar entre s dichos campos ( ver Figura 2). Ellas son:
relaciones cinemticas entre deformaciones y desplazamientos, relaciones constitutivas entre
tensiones y deformaciones, que dependen del material, y ecuaciones de equilibrio que relacionan
fuerzas con tensiones.
Cinemticas
Equilibrio
f = f ()
= (u)
Constitutivas
= ()
Figura 2: Relaciones entre los diferentes campos asociados a un problema elstico
Ejemplo: Para ilustrar los conceptos mencionados se considera la barra traccionada de la Figura 3.
Figura 3: Ejemplo simple de una barra en traccin
1. Ecuaciones Cinemticas = u / L ( Problema geomtrico ).
2. Ecuaciones de Equilibrio F = A ( Fuerzas y tensiones ).
3. Ecuaciones Constitutivas = E ( Depende del material ).
EA
u . (1)
L
que es una ecuacin de equilibrio en funcin de los desplazamientos que corresponde al mtodo de
la rigidez. A es el rea de la seccin, L es el largo de la barra, u es el alargamiento y E es el mdulo
de Young del material de la barra.
Empleando estas ecuaciones se llega a . F =
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
2 ANLISIS DE TENSIONES
2.1 Vector tensin
Consideraremos un cuerpo tridimensional para el cual interesa conocer las tensiones asociadas
a un punto P de un plano. Dicho plano queda definido por la direccin normal . Notacin: una
tilde debajo de una variable significa que es un vector.
Figura 4: Tensin en un punto de una seccin plana
De acuerdo con el principio de tensin cuando el rea tiende a cero (ver figura 4) el cociente entre
la carga Fv y el rea A tiende a un valor definido v . ( Recordar que realizamos un anlisis
macroscpico).
El vector de tensin v vara de punto a punto y depende de la direccin .
dFv
Fv
(2)
lim
v =
=
A 0 A
dA
Como, en general, v no coincide en direccin con el versor , se puede descomponer en una
cortante
componente de tensin normal
vv y otra componente de tensin
vs contenida en el
plano segn se muestra en la Figura 5.
=
v vv v + vs s
(3)
Figura 5: Descomposicin del vector de tensin en una tensin normal y otra cortante
2.2 Tensor de tensiones
Para estudiar el estado tensional en un punto de un cuerpo tridimensional comenzamos por
definir una terna cartesiana t 1 , t 2 , t 3 ( versores ) y las tensiones i asociadas a las caras de un cubo
elemental cuyas caras coinciden con los planos coordenados (ver Figura 6 ).
Figura 6: Tensiones asociadas a las caras del cubo elemental en coordenadas cartesianas
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Cada vector de tensin i ( Figura 6-a ) puede descomponerse en las tres direcciones
cartesianas dando origen a las llamadas componentes cartesianas de tensin ij , ( Figura 6-b)
donde el primer ndice indica el plano asociado a la tensin y el segundo la direccin de la
componente. Notar que cuando los ndices son iguales se trata de tensiones normales y cuando son
distintos de tensiones de corte.
1 = 11 t 1 + 12 t 2 + 13 t 3
2 = 21 t 1 + 22 t 2 + 23 t 3
(4)
3 = 31 t 1 + 32 t 2 + 33 t 3
Para abreviar la notacin se utiliza la notacin indicial donde ndices repetidos en un mismo
trmino indican sumatoria.
i = ij t j
(5)
El ndice i se llama ndice libre, mientras que el ndice repetido j indica una sumatoria
para los posibles valores de j = 1, 2, 3.
Ms adelante se demuestra formalmente que ij son las componentes de un tensor cartesiano
de segundo orden que en lo sucesivo llamaremos tensor de tensiones ij.
2.3 Relacin entre el vector de tensin y el tensor de tensiones
Vamos a demostrar que una vez conocido el tensor de tensiones en un punto se puede determinar el vector de tensin correspondiente a cualquier direccin arbitraria definida por el versor .
Para ello basta considerar el equilibrio entre las fuerzas actuantes en las caras de un tetraedro elemental
como se muestra en la Figura 7.
Figura 7: Fuerzas actuantes sobre las caras del tetraedro de Cauchy
o bien en notacin indicial:
0
v dA 1 dA1 2 dA2 3 dA3 =
(6)
v dA i dAi =
0
(7)
donde aunque no lo hacemos aqu, se puede demostrar que:
dAi = vi dA
reemplazando y simplificando:
por lo tanto: v = vi i
0
v vi i =
Sustituyendo (5) en (9) y despejando se llega a:
v = ij vi t j
(8)
(9)
(10)
Conocida como frmula de Cauchy que muestra que el tensor de tensiones ij define completamente el estado tensional en un punto ya que a partir de ese tensor se puede determinar el vector
tensin v asociado a cualquier plano definido por su direccin (versor ) .
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Desarrollando (10) se tiene:
v = ( 1 j v1 + 2 j v2 + 3 j v3 ) t j
v = ( 11 v1 + 21 v2 + 31 v3 ) t 1 + ( 12 v1 + 22 v2 + 32 v3 ) t 2 + ( 13 v1 + 23 v2 + 33 v3 ) t 3
(11)
Aqu resulta obvia la conveniencia de la notacin indicial ya que (10) es ms compacta.
Para hallar la componente normal del vector de tensin basta proyectar v sobre la direccin
(12)
=
vv =
v
(
v
t
)
(
v
t
)
v
im i m
i j
recordando que los versores son ortonormales:
de donde:
0... si... j m
tj tm =
1... si... j = m
(13)
vv = ij vi v j
(14)
Para hallar la componente tangencial vs se usa el teorema de Pitgoras ( Figura 5) y se tiene:
=
vs
v vv2
2
(15)
2.4 Reciprocidad de las tensiones tangenciales
El equilibrio de momentos alrededor del eje x1 en el cubo infinitesimal de la Figura 6-b,
implica que:
(16)
( 23 dx1 dx3 ) dx2 ( 32 dx1 dx2 ) dx3 =
0
y en consecuencia:
(17)
23 = 32
similarmente tomando momentos con respecto a los otros ejes se llega a la condicin de reciprocidad;
ij = ji
(18)
que permite afirmar que el tensor de tensiones es simtrico.
2.5 Cambio de coordenadas
Interesa saber cmo se transforman las componentes del vector de tensin v y las componentes
del tensor de tensiones cuando se produce un cambio de coordenadas (ver Figura 8 ). Para el nuevo
sistema utilizaremos el ndice prima.
t1
t
2
t
3
11 12
=
22
21
31 32
13 t 1
23 t 2
33 t 3
(19)
donde ij es la proyeccin del versor t i sobre el versor t j
En notacin indicial (19) se escribe:
t m = m n t n
Figura 8: Cambio de coordenadas
(20)
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
El vector de tensin puede expresarse en el sistema sin prima:
v = m t m
(21)
v = n t n
(22)
o bien en el sistema prima como:
teniendo en cuenta (20) podemos escribir (21) como:
v = m m n t n
(23)
Comparando (22) con (23) se tiene:
n = m n m =
n 1,=
2,3 m 1, 2,3
(24)
La ecuacin(24) muestra cmo se transforman las componentes del vector de tensin. Cada
trmino contiene un solo coseno director mn y esta es la caracterstica de la transformacin de un
tensor de primer orden ( o sea un vector ). Teniendo presente que la matriz de rotacin tiene por
inversa a su transpuesta, matricialmente se tiene t = t , t = T t . Indicialmente t n = mn t m ,
llevando esto a (22) y comparando con (21) se muestra que:
m = mn n =
n 1,=
2,3 m 1, 2,3
(25)
Mediante un razonamiento similar podemos ver como se transforman las componentes de
tensin ij . Expresando la componente normal vv , que es un invariante, en ambos sistemas de
referencia, segn (14) se tiene:
vv = ij vi v j
vv = m m
(sistema sin prima )
(26)
(sistema prima )
(27)
Teniendo en cuenta (20) podemos escribir (26) como:
vv = ij ( i ) ( j m m )
(28)
igualando los segundos miembros de (27) y (28), pasando todo al primer miembro y sacando factor
comn se tiene:
lm
0
il j m ij ) l m =
(29)
Expresin que debe ser vlida para cualquier direccin v de modo que debe anularse el
parntesis, resultando:
m = i j m ij
(30)
En efecto, basta tomar v = (1,0,0) en (29) para demostrar que (30) se cumple para 11 .
. Posteriormente eligiendo
Tomando = ( 0, 1, 0) se demuestra que se cumple para 22
= ( 2 / 2, 2 / 2, 0) y teniendo en cuenta lo anterior se demuestra que (30) es vlida para 12 .
Similarmente se demuestra que (30) es vlida para los restantes valores de y m .
La ecuacin (30) muestra que ij es un tensor de segundo orden. Recordar que lo que define
el carcter tensorial de una variable es su ley de transformacin;
si en la ley de transformacin hay dos cosenos directores en cada
trmino estamos en presencia de un tensor de segundo orden
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
2.6 Direcciones principales de tensin
Anteriormente se vio ( Figura 5 ) que para cada direccin v queda definida la tensin normal
vv y la tensin de corte vs .
Definiremos como tensiones principales ( si existen ) a aquellas direcciones para las cuales las
tensiones cortantes son nulas.
vs = 0
(31)
v es una direccin principal
Estas direcciones principales resultan muy importantes porque segn se demuestra ms
adelante tienen asociadas tensiones normales mximas ( o mnimas ) .
La condicin v s = 0 se cumple cuando v coincide con , es decir:
v =
donde es un escalar. Reemplazando v segn la frmula de Cauchy (10) y siendo v = v j t j
( ij vi v j ) t j = 0
ij vi v j = 0
ya que para que se anule el vector deben anularse las tres componentes.
(32)
(33)
Desarrollando (33) se obtiene un sistema de ecuaciones cuyas incgnitas son las componentes
de la direccin principal v = ( v1 , v2 , v3 )
21
31 v1 0
11
12
0
(34)
22
32 v2 =
23
33 v3 0
13
Para obtener una solucin no trivial, y en consecuencia una direccin principal, debe anularse
el determinante de la matriz de coeficientes.
3 I1 2 + I 2 I 3 =
0
(35)
donde:
I1 =
ii
1
I2 =
( ii jj ij j i )
2
I3 =
det ( ij )
(36)
Estos tres valores I1 , I 2 , I 3 resultan independientes del sistema de coordenadas elegido y se
denominan invariantes de tensin. Desarrollando resulta:
I1 = 11 + 22 + 33
(traza de la matriz)
(37)
I=
11 22 + 22 33 + 33 11 ( 122 + 232 + 132 )
2
(38)
Resolviendo (35) se encuentran las tres races que resultan reales y si adems son distintas
correspondern a tres direcciones mutuamente ortogonales. Esto se puede adelantar basndonos en
conocimientos de lgebra lineal.
Supondremos que las tensiones principales estn ordenadas por tamao:
(1) > ( 2) > ( 3)
(39)
Si utilizamos a las direcciones principales como sistema coordenado el tensor de tensiones
resulta diagonal.
(1)
ij = 0
( 2)
0
( 3)
(40)
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Teniendo en cuenta (40) y (14) podemos escribir la tensin normal asociada a una direccin
arbitraria v = (v1 , v2 , v3 ) cuyas componentes estn referidas a ejes principales como:
(41)
vv = (1) v12 + ( 2) v22 + ( 3) v32
Teniendo en cuenta (39) y recordando que el mdulo del versor v es unitario:
v12 + v22 + v32 =
1
se observa que el mximo valor de (41) corresponde a:
=
v1 1,=
v2 0,=
v3 0
vv mx = (1)
(42)
(43)
Notar que en el sistema coordenado (40) haciendo v = (1, 0, 0) se tiene la direccin principal v 1 .
Similarmente se puede demostrar que el valor mnimo para la tensin normal se obtiene de (41)
cuando v = ( 0,0,1) y resulta:
vv
= ( 3)
(44)
min
Es posible demostrar, aunque no lo haremos aqu, que la mxima tensin de corte es:
1
=
vs
( 3)
2 (1)
(45)
mx
2.6.1 Caso particular donde una de las tensiones principales es nula
Frecuentemente se anula una columna del tensor de tensiones ( y la correspondiente fila por
simetra). En tal caso, bosquejar el crculo de Mohr (como se indica en la Figura 9), ayuda a
recordar las expresiones para las tensiones mximas (1), (3) y mx dadas en las ecuaciones (48).
Pero hay que tener presente que el crculo de Mohr de la izquierda de la Figura 9 no es suficiente, ya
que deben considerarse tres crculos de Mohr (no hay que olvidar a la tensin normal nula):
Figura 9: Crculos de Mohr para el caso de tensin plana
Ejemplos:
ij =
0
ij
;
=
0
0
0
A
=
+
2
0
0
0
+
2
(46)
;
R
=
(47)
=
=
el mayor entre { A + R , 0 }
max
(1)
=
=
el menor entre { A R , 0 }
min
( 3)
vs=
=
(max)
max
1
2
(1) (3)
(48)
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
2.6.2 Crculo de Mohr
Un caso muy frecuente de transformacin de coordenadas ( seccin 2.5 ) corresponde a la
rotacin del sistema alrededor de uno de los tres ejes. Consideramos una rotacin antihoraria
alrededor de eje z como se indica en la Figura 10. Las componentes del tensor de tensiones en el
sistema nuevo ( prima) se pueden obtener a partir de las componentes en el sistema viejo (sin
prima) por condiciones de equilibrio segn (19) donde debemos recordar que las componentes de
mn son las componentes del sistema viejo en el sistema nuevo.
=
x
( cos , sen , 0)
y = ( sen , cos , 0)
(49)
z = ( 0, 0, 1 )
Figura 10: Rotacin del sistema de coordenadas alrededor del eje z
x
y
=
xy
cos 2
sen 2
sen cos
sen 2
cos 2
sen cos
2 sen cos x
2 sen cos y
( cos 2 sen 2 ) xy
(50)
esta expresin puede expresarse en funcin del ngulo doble (2 )
A + B cos 2 + xy sen 2
x =
donde
x +y
A=
2
x y
B=
2
A B cos 2 xy sen 2
y =
xy =
B sen 2 + xy cos 2
(51)
Estas tres ecuaciones se pueden representar en un crculo de Mohr como se indica en la Figura 11.
Se ubican en el eje de las abscisas las tensiones x y y ( x y ).
Importante: xy es positivo si al actuar en la cara perpendicular a x tiene el sentido positivo del eje y.
Regla: xy positivo hacia abajo
=
A
=
R
x +y
=
B
2
=
radio
x y
2
2
B 2 + xy
x =
A + R cos ; mx =
A+ R
(52)
xy=
R sen
mn=
A R
y = A ( x A) ; m x = R
Figura 11: Cambio de tensiones normales y cortantes por una rotacin alrededor del eje z
2.6.3 Caso general ( tridimensional )
Debemos calcular I1, I2 e I3, resolver la ecuacin (35) y luego calcular los mximos segn
(43), (44) y (45). Generalmente no es importante determinar las direcciones principales (vectores
propios ), pero si fuese necesario determinarlas deberamos resolver el sistema (34) para cada uno
de los valores propios (1), (2) y (3) . Se sugiere al lector deducir (48) empleando (35) y(36).
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
2.7 Ecuaciones diferenciales de equilibrio
Se desea encontrar la relacin de equilibrio entre las fuerzas msicas en un punto y la variacin
de las tensiones que se originan en las proximidades de ese punto.
Estudiaremos el equilibrio del cubo elemental de la Figura 12 ( similar al de la Figura 6 ).
Figura 12: Equilibrio del cubo elemental
Considerando el equilibrio de fuerzas (vectorial ) en las caras y en el volumen se tiene:
3
(53)
0
dx1 dx2 dx3 + dx2 dx1dx3 + dx3 dx1dx2 + F dx1dx2 dx3 =
x1
x2
x3
Simplificando y considerando componentes segn la direccin j se tiene:
1 j
x1
2 j
x2
3 j
x3
+ Fj =
0
(54)
que puede escribirse en notacin indicial como:
ij
xi
+ Fj =
0
(55)
Notar que se trata de tres ecuaciones ( una para cada uno de los posibles valores del ndice j )
de cuatro trminos cada una. Suponiendo conocidas las fuerzas msicas Fj ( x , x , x ) asociadas al
volumen, y reconociendo la simetra del tensor de tensiones nos quedan an seis incgnitas
(componentes del tensor de tensiones) por lo que el sistema (55) es estticamente indeterminado.
1
2.8 Condiciones de borde de tensin
En el contorno del cuerpo tambin se debe cumplir equilibrio de fuerzas ( ver Figura 13). Para
ello el vector de tensin asociado a la direccin normal a la superficie en cada punto es exactamente la tensin producida por la fuerza distribuida sobre la superficie que llamaremos f .
reemplazando v segn (9)
v f
(56)
vi i = f
(57)
Figura 13: Condiciones de borde de tensin
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
de la ltima ecuacin vectorial se pasa a sus componentes usando (5) llegando a:
ij v j = f i
(58)
Conclusin: Las componentes del tensor de tensiones deben ser tales que equilibren las fuerzas
msicas en el interior del cuerpo segn (55) y satisfagan las condiciones (58) en el contorno.
Hay que destacar que (58) debe cumplirse an en aquellos puntos en que f = 0. Ms an, el caso en
que ( f=
f=
f=
0 ) , la ecuacin (58) no implica que todas las componentes de ij sean nulas.
1
2
3
En el caso de un cilindro cargado axialmente como se indica en la
Figura 14, si se considera un elemento prximo a la cara lateral se
observa que no hay tensin normal ni cortante asociada a la cara lateral
pero si hay tensin normal en el sentido vertical.
Figura 14
Un argumento similar puede hacerse para (55); la ausencia de
fuerzas msicas (caso en que=
F1 0,=
F2 0,=
F3 0 ) en las proximidades
( infinitesimales ) de un punto no implica que las tensiones permanecen
constantes en las proximidades de ese punto.
Los razonamientos anteriores estn en concordancia con el hecho de que no es posible hallar
las tensiones en un punto basados solamente en las fuerzas ( msicas o de superficie) que actan en
dicho punto.
3 ANLISIS DE DEFORMACIONES
3.1 Alargamiento especfico de una fibra
Vamos a considerar una fibra AB de longitud infinitesimal que antes de la deformacin tena
direccin ( versor ). Despus de la deformacin la fibra AB ocupa la posicin AB y su
longitud cambi de dr a dR . Denotamos con u al desplazamiento del punto A. Para el punto B
infinitamente prximo a A el desplazamiento es u + du. Todo esto se indica en la Figura 15.
r = xi t i dr = dxi t i
dxi
(59)
i =
dr
=
dr i t i
dr dr
adems =
Nos proponemos relacionar el alargamiento especfico
longitudinal de la fibra definida por con los
desplazamientos del punto A :
=
E
dR dr
=
dr
Figura 15: Deformacin de una fibra en la direccin
dR
1
dr
(60)
La longitud inicial es el mdulo del vector dr :
dr =
dx12 + dx22 + dx32 =
dxi dxi
(61)
de donde: dr = dxi dxi
2
(62)
Similarmente:
dR =
(dxi + dui ) (dxi + dui ) =dxi dxi + dxi dui + dui dxi + dui dui
2
2
(63)
o tambin:
dR = dr + dxi dui + dx j du j + dum dum
Notar que se puede cambiar el ndice repetido dentro de cualquier trmino sin cambiar el valor
de la sumatoria que dicho ndice repetido est indicando.
2
10
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Por propiedad de diferenciales se tiene:
ui
u
u
ui
dx1 + i dx2 + i dx3 =
dxm
x1
x2
x3
xm
entonces (63) puede escribirse como:
dui =
dR =
dr
(64)
u j
u
u
dxi dx j + m dxi m dx j
i dx j dxi +
xi
xi
x j
x j
(65)
o bien:
ui u j um um
+
+
dxi dx j
x
x
x
x
j
i
i
j
A continuacin se definen las componentes de deformacin ij como:
dR dr =
=
ij
(66)
1 ui u j um um
+
+
xi x j
2 x j xi
(67)
Entonces (66) puede escribirse como:
dR dr =
2 ij dxi dx j
dividiendo por dr dr se tiene:
(68)
y teniendo en cuenta (59) resulta:
dR
dx dx j
2 1 =2 ij i
dr dr
dr
(69)
dR
2 = 1 + 2 ij i j
dr
Finalmente reemplazando en (60) se llega a:
E =
1 + 2 ij i j
(70)
(71)
De (68) y (67) se deduce que los alargamientos especficos estn relacionados con las
derivadas de los desplazamientos.
3.2 Distorsin angular
Durante la deformacin, las fibras adems de alargarse ( o acortarse) giran produciendo
variaciones en el ngulo formado por dos fibras ( y ) concurrentes en un punto (ver Figura 16).
Resulta particularmente til conocer la variacin
del ngulo entre fibras que antes de la deformacin
formaban un ngulo de 90 porque esa distorsin
angular est asociada a tensiones cortantes. Se puede
demostrar ( no lo hacemos aqu ) que el cambio de
ngulo entre dos fibras ( y ) a 90 ( distorsin
angular) est relacionado con las componentes
de deformacin ij segn:
sen =
2 ij i j
1 + 2 ij i j
1 + 2 ij i j
Figura 16: Variacin del ngulo entre dos fibras concurrentes en un punto
11
(72)
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
3.3 Tensor de deformaciones
Segn se observa en (71) y (72) las llamadas componentes de deformacin ij permiten
calcular las deformaciones longitudinales y angulares en un punto de un slido deformado. Dichas
componentes definen completamente el estado de deformacin en un punto.
Interesa conocer como se transforman las ij cuando se cambia el sistema coordenado. Para
ello escribimos el invariante definido en (68).
(73)
dR dr =
2 ij dxi dx j
Notar que la diferencia de los cuadrados de las longitudes antes y despus de la deformacin
no depende del sistema de referencia empleado. Por lo tanto podemos emplear un nuevo sistema
que denotaremos con el superndice prima, y escribir:
2
(74)
dR dr =
2 m dx dxm
Recordando como se transforman las componentes de un vector, ver (24), podemos escribir
(73) como:
2
2
(75)
dR dr =
2 ij ( i dx ) ( j m dxm )
Restando miembro a miembro (74) y (75) se obtiene ( m i j m ij ) dx dxm =
0
y como dx es arbitrario el parntesis debe ser nulo:
2
m = i j m ij
(76)
Esta ecuacin demuestra el carcter tensorial de las componentes de deformacin ij ya que
figuran dos cosenos directores en cada trmino y sta es una caracterstica de los tensores de
segundo orden.
En (77) definimos formalmente al tensor de deformaciones no lineal de Lagrange, ver (67).
=
ij
1
2
ui
u j
u um
+
+ m
xi
xl x j
x j
(77)
Notar que si se intercambian los subndices i , j en (77) se obtiene el mismo resultado. Por
lo tanto el tensor de deformaciones resulta ser simtrico
ij = ji
(78)
Notar adems que ij es una funcin no lineal de las derivadas de los desplazamientos debido
al trmino que contiene el producto:
um um
(79)
(3 trminos )
ui x j
Debemos destacar que (77) intervienen slo variables geomtricas y constituye una ecuacin
del tipo cinemtica.
3.4 Interpretacin fsica del tensor de deformaciones ij
Si en (71) hacemos coincidir a con alguno de los ejes de referencia, digamos el eje xi , se
tiene i = 1 y j = 0 para i j y resulta:
Ei = 1 + 2 ii 1
(80)
=
Ei + 12 Ei2
ii
(81)
Despejando se obtiene:
Esto muestra que las componentes de la diagonal del tensor de deformaciones dependen de una
manera no lineal de las deformaciones especficas longitudinales en las direcciones de los ejes
coordenados.
12
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Si en (72) hacemos coincidir con el eje coordenado xi y hacemos coincidir con el eje
coordenado xj se obtiene:
2 ij
(82)
sen ij =
1 + 2 ii
1 + 2 jj
donde considerando (80) se puede escribir:
2 ij
sen ij =
(83)
(1 + Ei ) (1 + E j )
Despejando se tiene:
ij =12 (1 + Ei ) (1 + E j ) sen ij
i j
(84)
Ecuacin que muestra que las componentes fuera de la diagonal del tensor de deformaciones
dependen de una manera no lineal (debido a la funcin seno) de la distorsin angular ij que sufren
las fibras orientadas segn dos ejes coordenados. Notar que la incidencia de las Ei en los trminos
fuera de la diagonal es pequea porque Ei << 1 y lo mismo ocurre con Ej.
Caso de pequeas deformaciones
En este caso se tiene Ei2 << Ei << 1 , entonces:
sen ij ij
(85)
considerando (81) y (84) se tiene:
E1
ij = 12 12
1
2 13
12
1
2
13
E2
1
2
23
1
2
1
2
23
E3
(86)
donde se observa que en el caso de pequeas deformaciones el tensor de deformaciones tiene un
sentido fsico preciso.
3.5 Tensor lineal de deformaciones ij
En la definicin del tensor no lineal de deformaciones (77) el trmino
1 um
2 xi
um
x j
(87)
representa un giro que generalmente puede despreciarse. Adems, por lo general las deformaciones
son pequeas y resulta
ui
x j
ui
<<
x j
(88)
Podemos entonces definir el tensor lineal de deformaciones ij como:
ij
=
1 ui + u j
2 x j xi
(89)
expresin mucho ms simple que la correspondiente a ij de la ecuacin (77) y que se utiliza en la
mayora de los casos. Notar que (89) es vlida para pequeas deformaciones y pequeos giros.
Hay que remarcar que en el caso de pandeo resulta imprescindible utilizar el tensor no lineal
de Lagrange ij dado en (77).
Las distintas teoras se pueden resumir en el siguiente cuadro.
13
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Cuadro resumen de las deformaciones segn las distintas hiptesis
Teora
Deformacin
Tensor de
deformaciones
Grandes deformaciones
y grandes giros
=
ij
1 ui + u j + um um
2 x j xi
xi x j
Deformacin
especfica Ei
Distorsin
angular ij
Pequeas defor.
grandes giros
Ei = 1 + 2 ii 1
1 + E j
2 ij
ij = arcoseno
(1 + Ei )
ij
Pequeas defor.
pequeos giros
u
u
ij 1 i + j
=
2 x j xi
Ei ii
Ei ii
ij 2 ij
ij 2 ij
3.6 Ecuaciones de compatibilidad para el tensor lineal ij
Las ecuaciones (89) son seis ecuaciones con seis componentes de deformacin ij en el
primer miembro y tres desplazamientos ui en el segundo. Si las deformaciones se calculan primero
tenemos seis ecuaciones en derivadas parciales para determinar solo tres desplazamientos incgnitas.
En general el campo de desplazamiento ( nico y continuo) no existir a menos que las deformaciones satisfagan ciertas condiciones, llamadas ecuaciones de compatibilidad.
Se puede demostrar, aunque no lo haremos aqu, que las ecuaciones de compatibilidad son:
2 ij
xk xl
2 j
2 kl
2 ik
=
+
xi x j
x j x xi xk
i, j , k , = 1, 2,3
(90)
Notar que (90) implica 81 ecuaciones al variar los ndices i, j , k , pero al desarrollarlas se
encuentran solo seis diferentes ya que generalmente aparecen los mismos trminos en distinta
ubicacin. Esas 6 ecuaciones se dan en (91).
Algunos autores argumentan que de stas seis ecuaciones slo tres son independientes por el
hecho de que las (90) son slo seis ecuaciones con slo tres incgnitas.
Escritas en forma desarrolladas las ecuaciones de compatibilidad son:
2 32
211
+
=
x2 x3
x12
2 31
212
+
x1 x3 x2 x1
2 23
2 22 2 33
2
+
=
x32
x22
x2 x3
2 22 2 31
+
=
x1 x3 x22
2 32
2 21
+
x1 x2 x2 x3
2 33 211
2 31
2
=
+
x12
x32
x1 x3
2 33 212
+=
x2 x1 x32
2 31
2 32
+
x3 x2 x3 x1
211 2 22
212
2
+
=
x22
x12
x1 x2
(91)
4 ECUACIONES CONSTITUTIVAS
4.1 Modelos de comportamiento de un material
En las secciones anteriores se presentaron las ecuaciones de equilibrio y las ecuaciones cinemticas. Para definir completamente el problema deben especificarse, adems, las caractersticas
del material. Estas caractersticas en su forma ms general se definen por ecuaciones que relacionan
las tensiones con las deformaciones:
f1 ( ij ) = f 2 ( ij )
(92)
Los materiales empleados en ingeniera presentan gran diversidad en cuanto a su comportamiento, el cual depende de su estado tensional y las variaciones en el tiempo. Para poder solucionar
14
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
el problema se admiten modelos ( idealizaciones ) definidos por las funciones f1 ( ij ) y f 2 ( ij ) que
aproximen a los resultados experimentales ( ensayos ) en el rango de tensiones y el tipo de variacin
que corresponda.
Se ha desarrollado una variedad de modelos para cubrir la mayora de los casos de inters prctico.
Algunos son muy complejos y permiten estudiar problemas de plasticidad, fractura, creep, etc.
En este curso por razones de tiempo limitaremos nuestra atencin al caso ms simple correspondiente al material linealmente elstico e istropo. Este modelo a pesar de su sencillez permite estudiar
la mayora de los problemas de inters prctico.
4.2 Materiales linealmente elsticos
Para el caso linealmente elstico unidimensional en el sentido x1 se utiliza la conocida ley de
Hooke, como se muestra en la Figura 17:
11 = E 11
(93)
donde E es el mdulo de elasticidad longitudinal del material.
Esta idealizacin es buena aproximacin en muchos materiales.
Para el caso de deformaciones de corte en una dimensin
se tiene:
(94)
12 = G ( 2 12 )
Figura 17: Ley de Hooke
donde G es el mdulo de elasticidad transversal. Notar que el
factor 2 se origina en la definicin de 12 , ver (86) y (130).
Para el caso tridimensional de tensiones resulta necesario relacionar el tensor de tensiones con
el tensor lineal de deformaciones mediante una relacin del tipo:
ij = Cij k l k
(95)
donde Cijk es un tensor de cuarto orden llamado tensor de elasticidad que contiene 81 componentes
de elasticidad.
El carcter tensorial de Cij k se puede demostrar escribiendo (95) en el sistema prima y luego
reemplazando pq segn (30) y st segn (76).
Dado que ij y k son ambos simtricos requieren solo seis componentes de tensin con las
seis componentes de deformacin bastarn 36 componentes distintas.
=
i C=
i, j 1, 2,.....,6
ij j
(96)
donde
=
1 =
2 =
3 33
=
4 =
5 =
6 23
11
22
12
13
=
1 =
2 22=
3 33=
4 12=
5 =
6 23
11
13
(97)
Para el caso general, si adems existe una funcin para la energa de deformacin se necesitan
slo 21 constantes distintas porque se puede demostrar que Cij es simtrico.
Para el caso de materiales anistropos pero que presentan algn tipo de simetra el nmero de
constantes distintas se reduce.
Tipo de simetra
Constantes independientes
diagonal
tetragonal
octogonal
13
Notar que un slido posee simetra n-gonal si el sistema prima se obtiene por una rotacin de
valor 2 / n y resulta Cijk = C pqm
15
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
4.3 Caso de material elstico lineal e istropo
Un material es istropo cuando posee las mismas propiedades en cualquier direccin. En este
caso se puede demostrar que el nmero de constantes independientes requerido se reduce a slo
dos. Es comn que el ingeniero utilice:
E = Mdulo de elasticidad o mdulo de Young.
= Mdulo de Poisson.
Recordar que para el ensayo simple de traccin ( ver esquema en la Figura 18) se tiene:
y =
Ey ; x =
y
( acero: =
0,3 )
(98)
El material elstico lineal e istropo puede definirse tambin a travs de las
llamadas constantes de Lam y . Por supuesto esas constantes estn relacionadas
con las constantes E y ya que hay slo dos constantes independientes. Las relaciones
son:
( 3 + 2 )
E
E
(99)
=
=
E
=
2 (1 + )
2( + )
+
(1 + )(1 2 )
Figura 18
Notar que la segunda constante de Lam es el mdulo de elasticidad transversal G.
Se puede demostrar que la relacin (95) en el caso elstico lineal e istropo se reduce a:
=
ij
ij +
k k ij
1 +
1 2
(100)
1 +
ij
kk ij
E
E
(101)
o tambin:
=
ij
donde ij es el delta de Kronecker
1 cuando i = j
ij =
0 cuando i j
(102)
Para el caso de variacin de temperatura debe agregarse, al segundo miembro de (100), el trmino:
E
T ij
1 2
(103)
Se propone como ejercicio para el lector desarrollar las ecuaciones (100) y (101) y reducirlas
a su forma ms sencilla posible. La solucin, que incluye el cambio de temperatura, est en el
anexo al final del captulo en las ecuaciones (130) hasta (134) que son las que se utilizan en los
ejercicios prcticos.
5 MTODOS GENERALES DE LA ELASTICIDAD LINEAL
5.1 Ecuaciones generales
En elasticidad tratamos con fuerzas, tensiones, deformaciones y desplazamientos. Las tensiones
describen fuerzas en el interior de un cuerpo; las deformaciones se refieren a distorsiones locales y
los desplazamientos a movimientos de los puntos. Estas variables estn relacionadas entre s a
travs de ecuaciones de distinto tipo segn se vio en las secciones anteriores:
a) Ecuaciones de equilibrio: son relaciones entre las tensiones y i ) las fuerzas por unidad de
volumen F o bien ii) fuerzas distribuidas en el contorno, f.
ij
=
+ Fi 0
xi
=
ij i
son de origen fsico.
16
fj
(104)
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
b) Ecuaciones cinemticas: relacionan deformaciones con desplazamientos. Para el caso de
pequeas deformaciones y giros se defini,
1 ui u j
=
+
ij
(105)
2 x j xi
que es de tipo geomtrico.
c) Ecuaciones constitutivas: Relacionan
lineal e istropo resulta,
E
=
ij
1
que tiene origen experimental.
tensiones con deformaciones. Para el material elstico,
k k ij
ij +
1 2
(106)
Nota: Las ecuaciones de compatibilidad se derivan de las anteriores y por lo tanto no son
parte de las ecuaciones bsicas.
Dado un cierto problema tenemos 15 incgnitas, a saber: 3 componentes de desplazamiento, 6
componentes de tensin y 6 componentes de deformacin. Por otra parte, contamos con 3 ecuaciones de
equilibrio, 6 ecuaciones cinemticas y 6 ecuaciones constitutivas. Segn como se sustituyan las
ecuaciones unas en otras se tienen dos grandes mtodos: el de rigidez y el de las fuerzas.
Los problemas de elasticidad generalmente tienen las fuerzas msicas en el interior del cuerpo
como datos y en el contorno se tienen dos zonas: una donde se conocen las fuerzas de superficie
( nulas o no) y otra donde se conocen los desplazamientos (generalmente nulos ). Cuando se
resuelven primero los desplazamientos se usa el mtodo de la rigidez y cuando se calculan primero
las tensiones se usa el mtodo de las fuerzas.
5.2 Mtodo de los desplazamientos - Ecuaciones de Lam ( Mtodo de la rigidez )
Comenzamos escribiendo las ecuaciones constitutivas utilizando las constantes de Lam:
=
ij 2 ij + mm ij
(107)
A continuacin sustituimos en las ecuaciones de equilibrio (104) (55)
(108)
2 ij + mm ij + F j =
0
xi
en estas tres ecuaciones de equilibrio sustituimos las deformaciones empleando las ecuaciones
cinemticas (105):
1 ui u j
u
u
(109)
2 2 x + x + ij 12 xm + xm + Fj =
0
m
m
j
i
xi
o bien:
entonces:
2u j
xi2
2u j
xi2
2ui
2 um
+ ij
+ Fj =
0
xi x j
xi xm
(110)
2ui
2 um
0
+
+ Fj =
xi x j
x j xm
(111)
ya que debido al ij slo subsiste el trmino en que i = j . En el segundo trmino podemos
cambiar en ndice repetido i y llamarlo por ejemplo m sin que altere el resultado de la
sumatoria indicada por el ndice repetido. Entonces las ecuaciones de Lam son:
2u j
xi xi
+ ( + )
um
Fj 0
+=
x j xm
i 1, 2,3 =
m 1, 2,3
=
(112)
Notar que hay dos sumatorias indicadas por los ndices repetidos. El vector desplazamiento
que satisface (112) en el interior del cuerpo y que tambin satisface las ecuaciones de desplazamientos y/o fuerzas en el contorno es la solucin del problema. Las ecuaciones (112) son tres
ecuaciones de equilibrio que una vez resueltas permitirn hallar las deformaciones ij ( usando las
cinemticas) y luego a partir de las ij se podrn hallar las ij ( usando las constitutivas ).
17
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
5.3 Mtodo de las tensiones - Ecuaciones de Beltrami Michell ( Mtodo de las fuerzas )
Se parte de las ecuaciones de compatibilidad (91) donde se reemplazan las deformaciones ij
por medio de las ecuaciones constitutivas (101). Empleando luego las derivadas de las ecuaciones
de equilibrio se introducen las fuerzas msicas, resultando as 6 ecuaciones de compatibilidad en
funcin de las derivadas segundas de las tensiones.
2
F3
x1
1
+ =
0
x
F2
x3
+ x 3 =
0
2
2 11 + 1 div F + 1+1
F1
2 mm
+ 2 =
0
2
x1
x1
2
2 12 + 1+1 x mm
+ x 1 + =
0
x1
1 x2
2
2 22 + 1 div F + 1+1
F2
2 mm
+ 2 =
0
x2
x22
2 13 + 1+1 x mm
+
1 x3
2 33 + 1 div F + 1+1
F3
2 mm
+ 2 =
0
2
x3
x3
+
2 23 + 1+1 x mm
2 x3
(113)
Notar que el hecho de utilizar las derivadas de las ecuaciones de equilibrio no garantiza que se
cumpla el equilibrio. Si en lugar de tensiones se emplean funciones de tensiones se puede asegurar
que las ecuaciones de Beltrami - Michell (113) garantizan equilibrio.
6 TEOREMAS ENERGTICOS
6.1 Identidad fundamental
La expresin:
ij
dV
dV j ij ui dS ui
xi
x j
u u j
ij 12 i +
V
x j
(114)
es una identidad que se verifica a condicin de que ij = ji . La identidad se verifica independientemente de los valores ij y ui estn o no relacionadas entre s.
Para demostrar (114) basta reordenar el primer miembro y aplicar el teorema de Green que
establece que la divergencia en el volumen es igual al flujo a travs del contorno.
Esta identidad es importante porque segn sea el significado asignado a las variables tensiones
y desplazamientos se obtienen los diferentes teoremas de trabajos virtuales.
6.2 Ecuacin de trabajos virtuales
Definimos como desplazamiento virtual ui a cualquier desplazamiento posible compatible
con las condiciones de borde y al cual puede asocirsele un tensor de deformaciones virtuales.
1 ui + u j
2 x j
xi
En el interior del volumen, la ecuacin de trabajos virtuales establece que:
ij
=
dV
=
S
V
ij
ij
f i ui dS + Fi ui dV
V
(115)
(116)
cuya interpretacin fsica es la siguiente: El trabajo virtual interno es igual a la suma del trabajo
virtual de las fuerzas de superficie ms el trabajo virtual de las fuerzas de volumen. En esencia,
(116) establece la igualdad entre el trabajo virtual interno y externo.
Notar que del contorno S slo se considera la parte Sf donde las fuerzas de superficie fi
son conocidas, ya que donde las fuerzas (reacciones ) son desconocidas, es decir en los apoyos, los
desplazamientos virtuales son nulos.
Resulta simple demostrar que la ecuacin de trabajos virtuales garantiza que se cumple
equilibrio tanto en el interior del volumen como en la superficie de contorno Sf . Partimos de la
ecuacin (114) que rescribimos como:
18
Compendio de Clculo Estructural II FCEFyN UNC
=
ij ij dV
V
J.Massa-J.Giro-A.Giudici - 2015
j ij ui dS
S
ui
ij
x j
(117)
dV
igualando el segundo miembro de (117) al segundo miembro de (116)
j ij ui dS ui
S
ij
x j
dV =
fi ui dS + Fi ui dV
S
(118)
reordenando los trminos
ij
( x j + F ) ui dV = ( j ij fi )
V
ui dS
(119)
Esta ecuacin debe cumplirse para cualquier desplazamiento virtual ui . Podemos suponer
que dejamos fijo ui = 0 en S mientras variamos ui en V , entonces (119) se cumplir slo si
ij
x j
0
+ Fi =
(120)
en V
Por lo tanto el primer miembro es nulo para cualquier ui . La nica forma de que se anule el
segundo miembro para cada uno de los infinitos ui 0 posibles en S es que
v j ij fi =
0
(121)
en S
Queda demostrado que al cumplirse la ecuacin de trabajos virtuales se satisface el equilibrio.
6.3 Teorema de trabajos virtuales
De acuerdo con lo anterior se puede enunciar: Para que un sistema de tensiones, fuerzas de
volumen y fuerzas de superficie estn en equilibrio es necesario y suficiente que se cumpla la
ecuacin de trabajos virtuales para cualquier desplazamiento virtual .
Notar que no se utilizaron las ecuaciones constitutivas y por lo tanto la ecuacin de trabajos
virtuales vale para cualquier material ( incluso para materiales no lineales).
El teorema se puede emplear de varias maneras. La ms til consiste en expresar las tensiones
en funcin de los desplazamientos reales, empleando las ecuaciones constitutivas y cinemticas. En
ese caso (116) resulta una condicin suficiente para que se cumpla equilibrio en funcin de
desplazamientos reales.
Nota: de una manera similar es posible establecer un teorema de trabajos virtuales complementarios. La ecuacin de trabajos virtuales complementarios garantiza que se satisfacen las
ecuaciones de compatibilidad.
6.4 Energa interna de deformacin
Como se indica en la Figura 19, se define la energa por unidad de volumen o densidad de
energa W tal que:
; ij
=
dW =
ij d ij
Figura 19: Energa interna de deformacin
19
dW
d ij
(122)
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
La funcin W es tal que derivndola con respecto al tensor de deformaciones se obtiene el
tensor de tensiones; de manera que la existencia de W implica la existencia de una ecuacin
constitutiva.
Para un slido linealmente elstico resulta:
W = 12 ij ij
(123)
(9 trminos )
Si adems de ser linealmente elstico, el material es istropo se tiene la ecuacin constitutiva
(107) o bien (100). Sustituyendo en (123) se tiene:
=
W
1 2 +
ij
ij m m
2 ij
(124)
de donde:
=
W ij ij + 12 jj m m
( material lineal, elstico e istropo)
(125)
Notar que W es una funcin cuadrtica en las deformaciones. Como adems slo contiene
cuadrados es definida positiva, vale decir, ij =0 W =0 y si ij 0 W > 0
Notar que en caso de variacin de temperatura a la tensin dada por (107) o bien (100) debe
adicionrsele el trmino (103).
E
t
1 2
(1 + )
t
o bien
(126)
Si en (121) se reemplazan las deformaciones por las derivadas de los desplazamientos
utilizando para ello las ecuaciones cinemticas (89) se obtiene:
W=
ui
u j
um ul
+
+
4 x j xi
2 xm xl
(127)
6.5 Energa potencial total
Se define la energa potencial total de un cuerpo elstico, , como la suma de la energa
interna de deformacin ms la suma de la energa potencial de las fuerzas exteriores.
= W dV F u dV f u dS
(128)
es un funcional escalar porque la variable es una funcin. Tambin depende del material a
travs de W definida segn (125) o (127).
Partiendo de un desarrollo de Taylor para el funcional puede demostrarse que si se anula la
primera variacin de se satisface la ecuacin (116) de trabajos virtuales (T.V.) y queda
garantizado entonces el equilibrio.
= 0
Se satisface la ecuacion de T.V.
Se cumple equilibrio
(129)
6.6 Teorema de mnima energa potencial total
El teorema de mnima energa potencial total establece que:
De todos los posibles desplazamientos u que cumplen con las condiciones geomtricas de
contorno, aquel que hace mnimo a corresponde a un estado de equilibrio estable.
Es posible demostrar que la condicin = 0 es equivalente a integrar las ecuaciones de
Lam, ver (112).
Nota: Tambin es posible definir el funcional , denominado energa potencial complementaria;
y haciendo = 0 se puede garantizar que se cumplen las ecuaciones de compatibilidad.
20
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
ANEXO DEL CAPTULO 1
Ecuaciones constitutivas para materiales elsticos, lineales e istropos
Tensiones en funcin de las deformaciones (100)
11
=
11 (1 ) + ( 22 + 33 )
t
1 2
(1 + ) (1 2 )
12
=
E
12 G ( 212 )
=
1 +
=
22
22 (1 ) + ( 11 + 33 )
t
1 2
(1 + )(1 2 )
=
13
E
=
13 G ( 213 )
1 +
=
33
(1 ) +
1
1
2
( )(
) 33
=
23
E
=
23 G ( 2 23 )
1 +
(11 + 22 )
t
1 2
(130)
Deformaciones en funcin de las tensiones (101)
11=
1
11 ( 22 + 33 ) + t
E
12=
12
1 +
12=
E
2G
22=
1
22 ( 11 + 33 ) + t
E
13=
13
1 +
13=
E
2G
33=
1
33 ( 11 + 22 ) + t
E
23=
23
1 +
23=
E
2G
(131)
Estado Plano de Tensiones: 33 = 0
33= 0
33=
1 +
t
(11 + 22 ) +
1
1
(132)
reemplazando (132) en las tensiones (130) se tiene:
=
11
E
11 + 22 (1 + ) t
1 2
(133)
E
22
=
22 + 11 (1 + ) t
1 2
Las relaciones inversas resultan:
=
11
1
[ 11 22 ] + t
E
=
22
1
[ 22 11 ] + t
E
(134)
21
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
22
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
PRCTICO
Ecuaciones Fundamentales
Demostrar el carcter tensorial de las componentes de tensin ij partiendo de la frmula de
Cauchy.
Escribir en forma desarrollada las siguientes ecuaciones:
a) (14)
(30)
b) 13
c) (54) y (58) para j = 3
d) E (71)
e) 11 y 22 (67)
f ) 11 y 12 (89)
Explicar cmo se demuestra la simetra en los siguientes casos:
a) Tensor de tensiones.
b) Tensor de deformaciones.
En un punto interior de un slido se ha computado el tensor de
tensiones ij ( en kg/mm2 ) resultando :
Se pide:
8, 2
ij =
simet
2, 4
6,8
0
0
2
a) Determinar la tensin normal y la tensin cortante s
asociadas a un plano vertical bisectriz del primer octante.
b) Determinar la mxima tensin normal y la mxima tensin
cortante en el punto considerado.
del tensor
c) Usando el resultado 2-b, encontrar la componente 13
de tensiones referido al nuevo sistema que se obtiene rotando un
ngulo en sentido antihorario alrededor del eje x3.
= arctg (4/3)
d) Hallar (matricialmente) el tensor de tensiones en el nuevo sistema
definido en 4-c y comentar el resultado.
Para un slido cilndrico, de 1 cm de radio, sometido a torsin se conocen los desplazamientos:
x1 (1 cos ax3 ) x2 sen ax3
u1 =
siendo a =
0,001
x2 (1 cos ax3 ) + x1 sen ax3
u2 =
1 a 2 ( x12 + x22 ) x3
u3 =
2
2
Material:
=
0,3
=
E 2100000 kg / cm=
f 2800 kg / cm 2
Se pide:
a) Calcular ij en A = [ 1, 0, 100 ] y con ese valor calcular ijA .
b) Calcular ij en A y con ese valor calcular ijA .
c) Calcular ij en B = [ 1, 0, 0 ] y con ese valor calcular ijB .
d) Calcular ij en B y con ese valor calcular ijB .
e) Comparar los resultados obtenidos en a), b), c) y d).
23
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Escribir en forma desarrollada las ecuaciones (112) y (125).
Dado el siguiente estado de tensin plana se puede
anticipar que 33 es nulo ?
=
ij
Si no es nulo calcular su valor.
2000
simet
Nota: ij est dado en [ kg/cm2 ] y el material es acero.
Dado el siguiente estado de tensin plana se puede
anticipar que 33 es nulo?
=
ij
Si no es nulo calcular su valor.
Nota: el material es acero.
Determinar el estado tensional y de deformaciones en el
interior del cilindro confinado del croquis.
1000
500
0,0003
0,0010
0,0004
simet
0
0
0
0
0
0
Material aluminio
E = 7500 kg/mm2
G = 2750 kg/mm2.
Ignorar el rozamiento en las paredes.
10 Mediante 3 extensmetros elctricos ubicados sobre la superficie
libre plana de un slido ( ver croquis) se midieron las siguientes
deformaciones:
0,0001
0,0002
11 =
22 =
E =
0,0004
Material acero:
E = 2100000 kg/cm2
0,2 = 4000 kg/cm2
= 0,3
Calcular la mxima tensin normal y la mxima tensin cortante.
Ayuda:
1) Por ser superficie libre 33 = 0 .
11
2) Una vez conocidas las tensiones usar el crculo de Mohr.
Los desplazamientos de la cua de la figura son:
u1 = 0
u2 =
0,0005 x3
u3 = 0,001 x3
[cm]
Se pide:
a) Hallar las fuerzas de volumen F = [ F1, F2, F3 ]
necesarias para mantener el estado deformado.
b) Hallar las fuerzas de superficie f = [ f1, f2, f3 ] en
cada una de las caras.
Nota:
1) Material acero:
E = 2100000 kg/cm2
2) F y f son densidades:
0,2 = 3200 kg/cm2
2
Fi en [kg/cm ] y fi en [kg/cm ]
24
= 0,3
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
SOLUCIN del PRCTICO
Ecuaciones Fundamentales
Se pide demostrar el carcter tensorial del tensor de tensiones.
(25)
Ec. (10)
=
(20)
=
ij ( ir r )=
( js ts ) ( ij ir js ) r ts en el sistema sin prima
ij i t j
= rs r t s en el sistema prima. Igualando y reordenando se tiene:
( rs ij ir js ) r tss =
0 ( rs ij ir js ) r =
0 s
ya que el vector
nulo tiene todas las componentes nulas. Adems es arbitrario.
Si = ( 1, 0, 0) el parntesis debe anularse para r = 1
Si = (0, 1, 0 ) el parntesis debe anularse para r = 2
Si = ( 0, 0, 1 ) el parntesis debe anularse para r = 3
En consecuencia el parntesis se anula para todo s y para todo r, por lo tanto:
rs = ij ir js
Se pide escribir en forma desarrollada varias ecuaciones dadas en notacin indicial.
a) = ij i j = 1 j 1 j + 2 j 2 j + 3 j 3 j = ( 11 1 1 + 12 1 2 + 13 1 3 )
+ ( 21 2 1 + 22 2 2 + 23 2 3 ) + ( 31 3 1 + 32 3 2 + 33 3 3 )
Por simetra=
i j ji
= 11 12 + 22 22 + 33 32 + 2 12 1 2 + 2 13 1 3 + 2 23 2 3
11 ( 13 11 + 23 12 + 33 13 ) +
= i1 j 3 ij=
b) 13
+ 21 13 21 + 23 22 + 33 23 + 31 13 31 + 23 32 + 33 33
c)
i 3
+ F3 = 0
xi
i 3 i = f3
13 23 33
+
+
+ F3 = 0
x1
x2
x3
13 1 + 23 2 + 33 3 = f3
Por similitud con el resultado 2 a) reemplazamos por
1 + 2 ( 11 21 + 22 22 + 33 32 + 2 12 1 2 + 2 13 1 3 + 2 23 2 3 ) 2 1
d) E =
u 2 u 2 u 2
3
1
2
+
+
x1 x1 x1
1 u1 + u2 + u1 u1 + u2 u2 + u3 u3
2 x2 x
x1 x2
x1 x2
x1 x2
1
u
x1
e) 11 =1 + 12
12=
u
u
f ) 11= 1 1 + 1 =
2
x1
x1
u1
x1
u
u
12= 1 1 + 2
2 x2 x1
Se pide demostrar la simetra del tensor de tensiones y de deformaciones.
a) La simetra del tensor de tensiones se demuestra planteando equilibrio de momentos en un cubo
infinitesimal.
b) La simetra del tensor de deformaciones se demuestra por simple inspeccin de la ecuacin de
definicin de dicho tensor.
25
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Se pide determinar las tensiones en un punto de un slido.
a) =
, 0
,
( sen45o , cos 45o , 0 ) =
2
2
Problema 2-a
= 8, 2
+ 6,8
2
2
2
2
Ec. (11) = 8, 2
2,
4
2 + 0 t1 +
=
7, 49533 t1 + 3,11126 t 2 + 0 t 3
=
s
(9,925) ( 9,9 )= 0,7
2 2
+ 0 + 2 ( 2, 4 )
0 9,9
+ 0 +=
2 2
2
2
2, 4
+ 6,8
+ 0 t 2 + [ 0 + 0 + 0] t 3
2
2
=(7, 495) 2 + ( 3,11126 ) + 02 =
9,925
2
= 9,9 kg / mm 2
=
0,7 kg / mm 2
s
b) I1 = 8,2 + 6,8 2 = 13
I2 = (8,2 x6,8)+[6,8 x(2)]+[2 x 8,2] (2,4)2 02 02 = 20
I3 = 8,2 x 6,8 x (2) [(2,4)2 x (2)] = 100
Segn (35):
det = 3 13 2 + 20 + 100 =
0
Por tanteos:
(1) = 10
(2) = 5
Mxima tensin normal: 1 = 10
(3) = 2
1 10 ( 2 )
Mxima tensin de corte: mx = 1 (1) (3) =
2
=
mx 1=
kg / mm
0 2
mx 6 Kg / mm 2
c)
= 53,13
sen = 0,8
cos = 0,6
0,6 x ( 0 + 0 + 0 ) + 0,8
Problema 2-b =
13
d)
Ec. (30) ..
x1
x2
x3
x1
0,6
0,8
x2
0,8
0,6
x3
+ 0)
( 0 + 0 + 0 ) + 0 x ( 0 + 0=
m = i j m ij
El cmputo se puede organizar matricialmente:
( )
ij
jm
( ) j
8,2
2,4
0,6
0,8
2,4
6,8
0,8
0,6
0,6
0,8
0,8
0,6
10
Comentario: Todas las tensiones de corte se anulan en el nuevo sistema de referencia, lo que
implica que los nuevos ejes son direcciones principales.
26
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
En este ejercicio se muestra que el tensor lineal de deformaciones ij resulta inapropiado para
describir el estado de deformacin cuando los giros son grandes, an en los casos donde las
deformaciones son pequeas.
El cilindro est empotrado en la parte inferior ( x3 = 0), all en el punto B, ij resulta adecuado,
mientras que en el extremo superior ( punto A) que ha girado (100 a ) = 0,1 radianes = 5,7 grados,
ij resulta totalmente inapropiado. Por otra parte ij da el resultado correcto en ambos extremos
( puntos A y B ).
Derivadas parciales:
u3
= a 2 x1 x3
x1
u3
= a 2 x2 x3
x2
u3
=
1 a 2 ( x12 + x22 )
2
x3
u2
u1
= sen ax3
=
cos ax3 1
x1
x1
u1
u2
= sen ax3
=
cos ax3 1
x2
x2
u2
u1
=
x2 a sen ax3 + x1 a cos ax3
=
x1 a sen ax3 x2 a cos ax3
x3
x3
Componentes del tensor lineal de deformaciones:
u
u
12= 1 1 + 2 =
0
2 x2 x1
=
11
u1
=
x1
=
22
u2
=
cos ax3 1
x2
1 u1 + u3 =
13 =
1 a ( x1 sen ax3 + x2 cos ax3 + a x1 x3 )
2 x3 x1
2
u
x3
1 u2 + u3 =
23 =
1 a ( x2 sen ax3 x1 cos ax3 + a x2 x3 )
2 x3 x2
2
cos ax3 1
3
33 =
=
12 a 2 ( x12 + x22 )
Derivadas en el punto A
u1
= 0,00499583
x1
u1
= 0,09983342
x2
u1
= 0,00009983
x3
u3
= 0,00000100
x1
u3
=0
x2
u3
= 0,00000050
x3
u2
= 0,09983342
x1
u2
= 0,00499583
x2
u2
= 0,00099500
x3
a)
0
49958
ij A 10
=
49958
sim
7
504
ijA
4975 =
0
0
20176
804 [kg / cm 2 ]
20176
12107
sim
b)
ij A
= 10
0
0
sim
5000 ij =
A
0
sim
27
0
0
807,69 [kg / cm 2 ]
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Derivadas en el punto B
u1
=0
x1
u1
=0
x2
u1
=0
x3
ijB
sim
ijB
sim
c)
d)
u3
=0
x1
u3
=0
x2
u3
= 0,0000005
x3
u2
=0
x1
u2
=0
x2
u2
= 0,001
x3
ijA
0,0005 =
0,0000005
0
0
0,0005
ij
A
0
0,61
0,81
sim
0
sim
0
0
807,69 [kg / cm 2 ]
1, 41
0
807,69 [kg / cm 2 ]
e)
En el punto inferior ( punto B ) donde no hay giros, los resultados c) son correctos.
En el punto superior ( punto A ) debido a que el giro es grande los resultados a) son totalmente
incorrectos. Sabemos que en el caso de torsin no hay tensiones normales en el sentido radial
del cilindro, pero empleando ij A de la parte a) obtenemos:
2100000
(130) 11 =
20176 kg / cm 2
[ 4,996 (0,7) + 0,3( 4,996 0,0005)] x103 =
1,3 x 0,4
que es 7 veces el valor de fluencia ( f = 2800 kg / cm 2 ).
Notar que la tensin de corte mxima tiene un valor razonable, 807,7 kg/cm 2, que es un 58 %
del valor de la tensin de corte en fluencia ( f 2800 / 2 ).
Se pide escribir en forma desarrollada las ecuaciones (112) y (125).
Forma desarrollada las ecuaciones de Lam (112):
2u j 2u j 2u j
+ 2 + 2
x 2
x2
x3
1
u u
u
0
+ ( + ) 1 + 2 + 3 + Fj =
x
x
x
1
2
3
Forma desarrollada la ecuacin (125) para la energa interna de deformacin:
W
=
( 112 + 222 + 332 + 2 122 + 2 132 + 2 232 ) +
(11 + 22 + 33 )
No se puede anticipar que 33 sea nula. Se pide determinar la deformacin 33:
1
33 = 0 0,3 ( 2000 500 ) =
0,00021 < 0, 2 % perodo elstico es correcto usar (101)
21000
No se puede anticipar que 33 sea nula. Se pide determinar la tensin 33:
=
33
21000
0 + 0,3 ( 0,001 =
0,0004 ) 727 kg / cm 2 < f acero es correcto usar (100)
(1,3)( 0, 4 )
28
Compendio de Clculo Estructural II FCEFyN UNC
J.Massa-J.Giro-A.Giudici - 2015
Se pide determinar el estado tensional en un cilindro confinado.
Datos: 33 =
15 kg / mm 2 11 =
0 22 =
0
por simetra 12 =
23 =
31 =
0
=
G
E
2 (1 + )
33 = 15 =
=
11
=
22
E
=
1
2G
7500
=
1 0,36364
2 x 2750
7500
( 0,636 ) + 0,364 ( 0 + 0 ) 33 = 0,001169
(1,364 )( 0, 273) 33
7500
0 + 0,364 ( 0 0,001169 ) 8,57 kg / mm 2
(1,364 )( 0, 273)
7500
(1,364 )( 0, 273)
0 + 0,364 ( 0 0,001169 ) 8,57 kg / mm 2
0
0
8,57
ij =
8,57 0 [ kg / mm 2 ]
15
simet
0
0
0
ij =
0
0
0,001169
simet
Notar que =
=
=
0 pero de todas maneras hay tensiones
=
=
0 y que =
12
23
13
12
23
13
cortantes en otras direcciones. Notar que la mxima tensin cortante vale:
1 8,57 ( 15 )=
3, 21 kg / mm 2
2
mx= 12 (1) ( 3) =
10
Se pide calcular la tensin normal mxima y la mxima tensin cortante usando mediciones.
(E
+ 1) 1
2
De (71) se =
despeja:
donde
=
ij i j
( 0,0004 + 1)
11 =
22 =
2100000
=
0,00055 889 kg / cm 2
1,3
2100000
( 0,7 ) + 0,3 ( 0,0001 + 0,0002
=
) 0
(1,3)( 0, 4 ) 33
=
33 0,0001286
2100000
0,0001 ( 0,7 ) + 0,3 ( 0,0002 + 0,0001286 ) = 369, 23 kg / cm 2
(1,3)( 0, 4 )
2100000
(1,3)( 0, 4 )
0,0002 ( 0,7 ) + 0,3 ( 0,0001 + 0,0001286 ) = 530,77 kg / cm
A = [ 369, 23 + (530,77) ] / 2 = 450
B = [ 369, 23 ( 530,77) ] / 2 = 80,77
mx
=
0,7071; 0 ]
= 0,0001 ( 0,7071) 0,0002 ( 0,7071) + 0 + 2 12 x 0,7071 x 0,7071 + 0 + 0
Despejando:
(130)
12
=
12 0,00055
=
=
33
[ 0,7071;
2
80,77 2 + 889=
893 kg / cm 2
1 =
450 + 893 =
443 kg / cm 2
2 =
450 893 =
1343 kg / cm 2
1343 kg / cm 2
mx =
mx =
893 kg / cm 2
29
Compendio de Clculo Estructural II FCEFyN UNC
11
J.Massa-J.Giro-A.Giudici - 2015
Se pide calcular las fuerzas en el volumen y en las caras de la cua. Se utiliza el siguiente
esquema de clculo:
u
derivando
cinemticas
11 =
constitutivas
derivando
equilibrio
Fy f
u
x1
33 =3 =
0,001
1 u1 + u3 =
13 =
0
2 x3 x1
u2
= 0
x2
12 =
32 =
11 =1 =
0
22 =
u
x3
1 u1 + u2 = 0
2 x2 x1
1 u2 + u3 = 0,00025
2 x3 x2
2100000
0= 0
1 + 0,3
2100000
=
0= 0
1 + 0,3
2100000
=
0,00025 = 404
1 + 0,3
2100000
12 =
2100000
0 ( 0,7 ) + 0,3 ( 0 0,001) = 1211
(1,3)( 0, 4 )
22 =
0 ( 0,7 ) + 0,3 ( 0 0,001) = 1211
(1,3)( 0, 4 )
13
33 =
2100000
0,0001 ( 0,7 ) + 0,3 ( 0 + 0 ) = 2827
1,3
( )( 0, 4 )
23
a) Hallar las fuerzas de volumen F = [ F1, F2, F3 ]
Cuando las tensiones son constantes las fuerzas de volumen son nulas. A modo de ejemplo
se desarrolla (54) para el caso j = 1:
11 21 31
F1
+
+
+=
x1
x2
x3
F1
=
por lo tanto:=
F1 0=
F2 0=
F3 0
b) Hallar las fuerzas de superficie f = [ f1, f2, f3 ] actuando sobre las caras de la cua.
Para calcular las fuerzas externas sobre las caras se comienza determinando los versores
normales a las caras y posteriormente se usa la ecuacin (58)
(58)
ij v j = fi
ij
El cmputo se puede organizar matricialmente
1211
0
0
0
1211
404
0
404
2827
1
0
1
0
0
1211
404
2
1
0
0
1211
0
0
30
3
0
1
0
0
1211
404
4
0
0
1
0
404
2827
5
0,6
0
0,8
727
323
2262
fi
f1
f2
f3
Вам также может понравиться
- Glosario de Mecanica de MaterialesДокумент32 страницыGlosario de Mecanica de MaterialesElvis DiazОценок пока нет
- Cap-16 RECIPIENTES Parte-1 PDFДокумент27 страницCap-16 RECIPIENTES Parte-1 PDFRodrigo Muñoz Valderrama100% (1)
- Diseño de Vigas de Acero Por Flexión Método LRFDДокумент6 страницDiseño de Vigas de Acero Por Flexión Método LRFDWilfredo Cesar Mendez GutierrezОценок пока нет
- Calculo Tanque API 650 2016Документ10 страницCalculo Tanque API 650 2016Elvis Diaz100% (4)
- Procesos de Soldadura (SMAW-GTAW-GMAW-SAW)Документ46 страницProcesos de Soldadura (SMAW-GTAW-GMAW-SAW)Elvis Diaz100% (1)
- Formulario de MecanicaДокумент19 страницFormulario de MecanicaElvis DiazОценок пока нет
- Diseño de Fajas AcalanadasДокумент30 страницDiseño de Fajas AcalanadasElvis DiazОценок пока нет
- AWS 2.4 Español PDFДокумент15 страницAWS 2.4 Español PDFKingsley Ayasca40% (5)
- Vigas Compuestas LRFD 93Документ22 страницыVigas Compuestas LRFD 93Elvis DiazОценок пока нет
- Mecanica de Fracturas.Документ12 страницMecanica de Fracturas.Elvis DiazОценок пока нет
- Cargas Criticas de Placas - TimoshencoДокумент16 страницCargas Criticas de Placas - TimoshencoElvis DiazОценок пока нет
- Diseño de Ejes Con La Norma AsmeДокумент9 страницDiseño de Ejes Con La Norma AsmeFrank Paul33% (3)
- Seleccion RodamientosДокумент36 страницSeleccion RodamientosAndrés Felipe Romero100% (1)
- Torque Pernos DINДокумент14 страницTorque Pernos DINGonzalo Rebolledo100% (5)
- Diseño y Construcción de Un Tanque para Almacenar 200 Toneladas de AceiteДокумент8 страницDiseño y Construcción de Un Tanque para Almacenar 200 Toneladas de AceiteAbimeleck Monsalve BОценок пока нет
- Pandeo de CilindrosДокумент18 страницPandeo de CilindrosElvis DiazОценок пока нет
- Diseño de Vigas Curvas.Документ16 страницDiseño de Vigas Curvas.Elvis DiazОценок пока нет
- Equivalencias Pernos Milimétricos Norma DinДокумент5 страницEquivalencias Pernos Milimétricos Norma DinVictor Hugo Alarcon Cuba80% (30)
- Temario de Examen Estructural 2016Документ1 страницаTemario de Examen Estructural 2016Elvis DiazОценок пока нет
- Empalmes de SoldaduraДокумент15 страницEmpalmes de SoldaduraElvis DiazОценок пока нет
- Metodologia Del Acero InoxidableДокумент37 страницMetodologia Del Acero InoxidableElvis DiazОценок пока нет
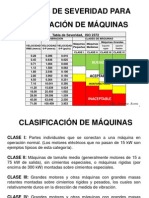
- Tablas de Severidad1 ISO 2372Документ5 страницTablas de Severidad1 ISO 2372knightfelix1288% (8)
- Transmisiones Elasticas - Correas - Cadenas 2013Документ27 страницTransmisiones Elasticas - Correas - Cadenas 2013Jose ZhawОценок пока нет
- Presupuesto Agua Contra Incendio.Документ38 страницPresupuesto Agua Contra Incendio.Elvis DiazОценок пока нет
- Bomba Hidraulica VerticalДокумент2 страницыBomba Hidraulica VerticalElvis DiazОценок пока нет
- Rieles GalvanizadosДокумент1 страницаRieles GalvanizadosElvis DiazОценок пока нет
- DICASAДокумент1 страницаDICASAElvis DiazОценок пока нет
- Motobomba ContraincendioДокумент4 страницыMotobomba ContraincendioElvis DiazОценок пока нет
- Brochure Gruas America S.A.C.Документ7 страницBrochure Gruas America S.A.C.Elvis DiazОценок пока нет
- Tanque GLPДокумент1 страницаTanque GLPElvis DiazОценок пока нет
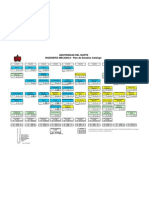
- Malla Ing MecanicaДокумент1 страницаMalla Ing MecanicaEuclides Cervantes BorrásОценок пока нет
- Manual-Química Farmacéutica IДокумент47 страницManual-Química Farmacéutica IRos..Оценок пока нет
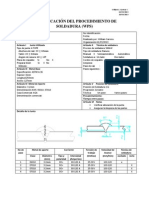
- Especificación Del Procedimiento de Soldadura (WPS) : William A. Carrera V. 18/03/2013 20/03/2013Документ4 страницыEspecificación Del Procedimiento de Soldadura (WPS) : William A. Carrera V. 18/03/2013 20/03/2013Andrés CarreraОценок пока нет
- Maquinas 1 Informe 1Документ5 страницMaquinas 1 Informe 1Isabella Dorado BurbanoОценок пока нет
- Transformaciones Inyectivas SobreyectivasДокумент13 страницTransformaciones Inyectivas SobreyectivasBenny Samir Bautista EscobarОценок пока нет
- Herramientas de PerforacionДокумент9 страницHerramientas de PerforacionAda OrtizОценок пока нет
- ArrancadoresДокумент112 страницArrancadoresdarksyte100% (1)
- Introduccion Al Proceso de Investment CastingДокумент25 страницIntroduccion Al Proceso de Investment CastingMETFIS100% (1)
- Ejes y Arboles de PotenciaДокумент33 страницыEjes y Arboles de Potencialuis vergaraОценок пока нет
- Informe 2Документ13 страницInforme 2jfkwhОценок пока нет
- Quiz 1 de Fisica 17 de 17Документ6 страницQuiz 1 de Fisica 17 de 17Tracy KnowlesОценок пока нет
- Informe FiltracionДокумент16 страницInforme FiltracionYodiOlazaОценок пока нет
- Introduccion Al Control de Motores ALTO AzcapotzalcoДокумент93 страницыIntroduccion Al Control de Motores ALTO AzcapotzalcoIng Emisael AlarcónОценок пока нет
- Glosario de Terminos Oscilaciones y oДокумент7 страницGlosario de Terminos Oscilaciones y oFranklin MenesesОценок пока нет
- 4.-Manual de Aplicacion de EncodersДокумент21 страница4.-Manual de Aplicacion de EncodersCrimson King LinaresОценок пока нет
- Movimiento Circular FisicaДокумент25 страницMovimiento Circular FisicaDiana ChiroqueОценок пока нет
- Lab Física 4. Práctica 1. Instrumentos de Medición PDFДокумент8 страницLab Física 4. Práctica 1. Instrumentos de Medición PDFJeiJohannaBermudezОценок пока нет
- Aire Acon.Документ36 страницAire Acon.Raul HernandezОценок пока нет
- As CensorДокумент22 страницыAs CensorCarla Daniela Simó HernándezОценок пока нет
- Convertidor de Par.: TecsupДокумент10 страницConvertidor de Par.: TecsupNelio Lara RicaldiОценок пока нет
- Reporte Metodos de AforoДокумент11 страницReporte Metodos de AforoCarlosAguilarОценок пока нет
- Taller Tercer Periodo CN NovenoДокумент3 страницыTaller Tercer Periodo CN NovenoAngie AldanaОценок пока нет
- Problemas Filosoficos de La Mecanica CuanticaДокумент8 страницProblemas Filosoficos de La Mecanica CuanticaIsrael Aaron PinoОценок пока нет
- Metodo 8 TraduccionДокумент10 страницMetodo 8 TraduccionHeather GatesОценок пока нет
- Unidad 4 - Introducción Al PandeoДокумент38 страницUnidad 4 - Introducción Al PandeoVictor M. CastroОценок пока нет
- Justificación de MantenciónДокумент4 страницыJustificación de MantenciónBrianIanBarruetoОценок пока нет
- Oscilaciones AmortiguadasДокумент9 страницOscilaciones AmortiguadasHenry Cayo HuamanОценок пока нет
- Ejercicio RefrentadoДокумент4 страницыEjercicio RefrentadoErlanDuarteОценок пока нет
- Este Método Debe Su Nombre A Carl Friedrich Gauss y A Wilhelm JordanДокумент4 страницыEste Método Debe Su Nombre A Carl Friedrich Gauss y A Wilhelm JordanCristhian SánchezОценок пока нет
- 20 Auni HidrostaticaДокумент2 страницы20 Auni HidrostaticaRenzo Josua Urbina MedinaОценок пока нет